










通讯方式选择
如今的四轴飞行器上使用的无线通信模块有5种大类,WIFI、蓝牙、2.4G模块、433M模块、868M模块。Wifi和2.4G其实都是一个频段,但是wifi是经过了协议封装的结果,而后者模块仅仅是用于传输,并没有任何协议。综合考虑下我使用了WIFI。其中弃用蓝牙是因为其传输距离的确太近,不符合微四轴的使用情况,而其他几种频段的通信则需要一个对等的接收装置,微型四轴飞行器其中一个理念就是更方便的使用,如果还需要单独配备一个要看设备岂不很麻烦。于是最终我选择了WIFI,主要原因在于使用者可以直接通过手机进行连接操控,并且wifi在通信距离和信息承载量也是合格的。这里我选择了使用安信可公司的ESP系列wifi模块,原因主要在于其低廉的价格和完善的产品使用资料,并且在以前有足够的使用经验。单独使用模块要有一个好处是可以屏蔽干扰,高频信号线会给电路引入干扰,使用模块后隔离开各个板层,使通信更加稳定。芯片如图。

该模块工作电压在3.0V到3.6V间,工作电流80mA左右,频段只支持2.4GHz到2.5GHz之间。可以通过UART/IIC/HSPI的方式进行通信。网络协议包含了IPv4,TCP/UDP/HTTP/FTP,管脚如图。
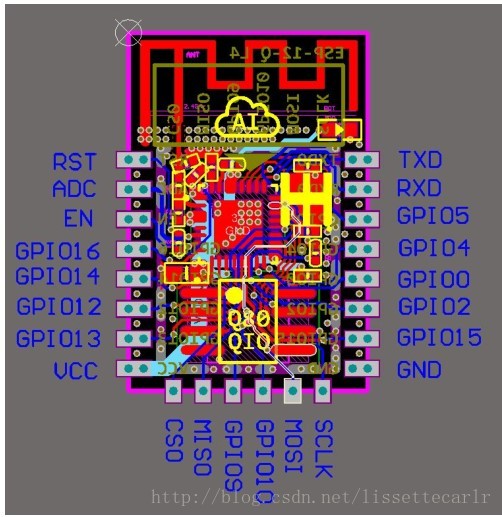
但不使用原厂提供的固件,而是使用乐鑫公司的透传固件,重刷固件需要改变模块的运行模式,配置GPIO0、GPIO15为低电平并将GPIO2拉为高电平的时候进入下载模式,配置GPIO15为低电平并且将GPIO2和GPIO0拉为高电平的时候进入正常运行模式。固件更新后,通过连上wifi,浏览器进入192.168.4.1进行相应配置,让该固件屏蔽底层传输,通过串口获取数据后对其连接的第一个设备发送UDP数据包,这样实现透传假象。但相应的缺点是无法同时连接两个设备进行通信。但对于此系统没有影响。















 6155
6155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









