







RRT+DWA
在无人水面船(USV)路径规划问题中,如何在复杂且动态的海洋环境中确保USV的路径既安全又高效是一个关键挑战。本文提出了一种改进的双向RRT(Bi-RRT)算法与动态窗口法(DWA)融合的混合路径规划算法——GIBi-RRT-IDWA算法。该算法结合了全局路径规划和局部动态避障的优势,能够应对复杂的海洋环境变化并有效避开障碍物。
在本文的博客中,我们将详细解释该算法的实现,包括其各个部分的代码设计和关键技术的解读。通过这些代码和方法,我们能够理解如何实现该算法并将其应用于USV的路径规划中。
1. Bi-RRT算法概述
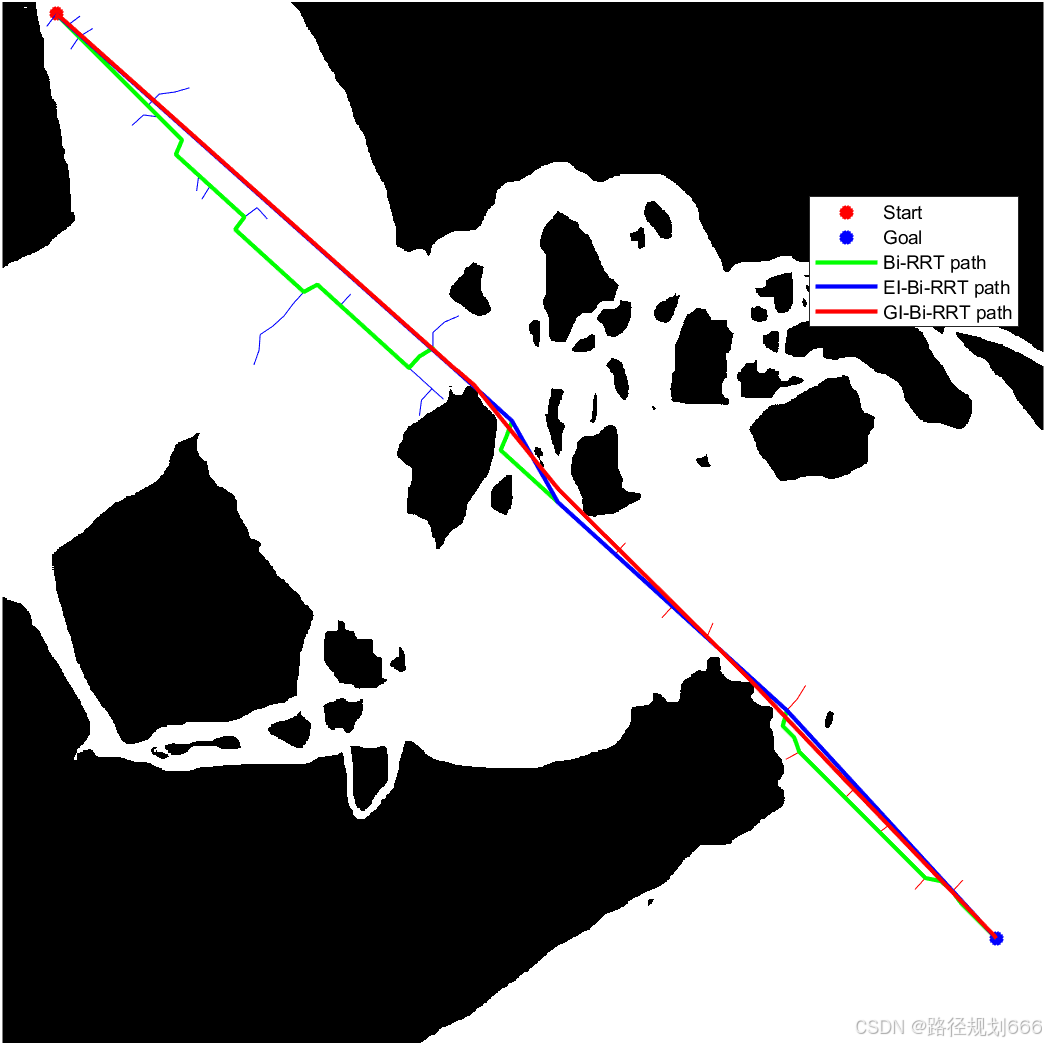
Bi-RRT是一种基于采样的路径规划算法,通过构建两棵树(从起点和终点分别开始)并交叉搜索来寻找最短路径。它有两个优点:
- 快速搜索:通过双向扩展树,减少了搜索时间。
- 高效扩展:比传统的RRT算法更加高效,能够快速找到一条连接起点和终点的路径。
然而,传统的Bi-RRT算法存在一些缺陷,尤其是在海洋环境中,路径规划时的节点较多,路径拐角尖锐,不适合船舶操作。因此,我们对Bi-RRT进行了改进,使其在路径节点上更加平滑,并能适应船舶的操纵需求。
1. Bi-RRT算法概述(MATLAB版)
Bi-RRT扩展与冗余节点剔除
classdef BiRRT
properties
start
goal
map
tree_start
tree_goal
end
methods
% 构造函数
function obj = BiRRT(start, goal, map)
obj.start = start;
obj.goal = goal;
obj.map = map;
obj.tree_start = start;
obj.tree_goal = goal;
end
% 扩展树的节点
function new_node = extend(obj, tree, target)
new_node = obj.sample(target);
if obj.is_valid(new_node)
tree = [tree; new_node]; % 添加到树中
else
new_node = []; % 无效节点
end
end
% 判断节点是否有效
function valid = is_valid(obj, node)
valid = ~obj.map.is_obstacle(node);
end
% 剔除冗余节点
function pruned_tree = prune_path(obj, tree)
pruned_tree = [];
for i = 1:length(tree)
node = tree(i, :);
if ~obj.is_redundant(node, pruned_tree)
pruned_tree = [pruned_tree; node]; % 保留非冗余节点
end
end
end
% 判断节点是否冗余
function redundant = is_redundant(obj, node, tree)
redundant = any(vecnorm(tree - node, 2, 2) < 1e-3); % 距离小于阈值
end
% 计算节点之间的距离
function dist = distance(~, node1, node2)
dist = norm(node1 - node2);
end
end
end
2. DWA局部路径规划(MATLAB版)
DWA评价函数的改进
classdef DWA
properties
usv
goal
map
wind
current
end
methods
function obj = DWA(usv, goal, map, wind, current)
obj.usv = usv;
obj.goal = goal;
obj.map = map;
obj.wind = wind;
obj.current = current;
end
% 评价当前速度和角度的代价
function cost = evaluate(obj, velocity, angle)
cost = obj.calculate_cost(velocity, angle);
if obj.is_collision(velocity, angle)
cost = cost + 1000; % 碰撞时代价很高
end
end
% 计算引导代价
function cost = calculate_cost(obj, velocity, angle)
heuristic_cost = norm(obj.usv.position - obj.goal);
dynamic_cost = obj.wind_impact(velocity) + obj.current_impact(angle);
cost = heuristic_cost + dynamic_cost;
end
% 风的影响
function cost = wind_impact(obj, velocity)
cost = dot(obj.wind, velocity);
end
% 海流的影响
function cost = current_impact(obj, angle)
cost = dot(obj.current, [cos(angle), sin(angle)]);
end
% 判断是否发生碰撞
function collision = is_collision(obj, velocity, angle)
new_position = obj.usv.predict_next_position(velocity, angle);
collision = obj.map.is_obstacle(new_position);
end
end
end
3. GIBi-RRT-IDWA算法(MATLAB版)
将改进的Bi-RRT算法与DWA算法结合,实现GIBi-RRT-IDWA混合路径规划。
classdef GIBiRRTIDWA
properties
bi_rrt
dwa
usv
end
methods
function obj = GIBiRRTIDWA(start, goal, map, wind, current)
obj.bi_rrt = BiRRT(start, goal, map);
obj.dwa = DWA(obj.usv, goal, map, wind, current);
end
% 路径规划主函数
function path = plan(obj)
% 执行全局路径规划
global_path = obj.bi_rrt.plan();
% 局部路径规划:动态调整路径
for i = 1:size(global_path, 1)
point = global_path(i, :);
[velocity, angle] = obj.dwa.local_planning(point);
% 更新USV位置
obj.usv.move(velocity, angle);
end
path = global_path; % 返回全局路径
end
end
end
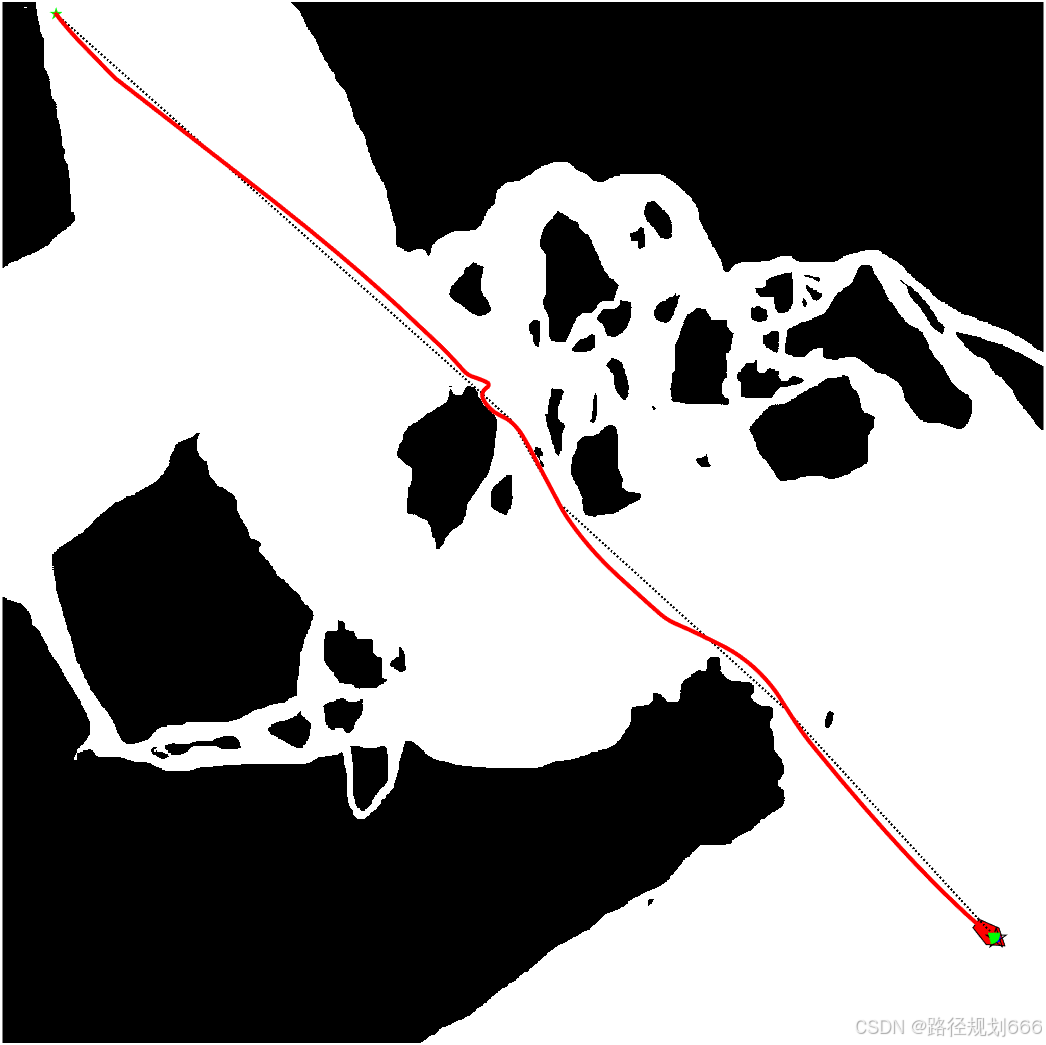
4. 总结与优化
- 全局路径规划:使用双向RRT(Bi-RRT)算法进行路径搜索,通过扩展树并进行路径优化,能够提高路径规划的效率与安全性。
- 局部路径规划:使用DWA算法结合海洋环境的影响因素(如风和海流),能够对路径进行实时调整,避免碰撞并快速接近目标。
- 融合全局与局部规划:GIBi-RRT-IDWA算法通过结合两者的优点,在复杂的海洋环境中进行动态路径规划,确保USV能够在安全的同时迅速完成任务。
在MATLAB中实现该算法时,需要对地图、USV运动模型以及障碍物检测等部分做具体实现,这里给出的代码主要是算法框架和核心功能的实现。你可以根据具体需求进行扩展和优化,比如增加更复杂的环境模型、优化路径搜索的效率等。
MATLAB代码
双向RRT融合DWA算法无人船路径规划(附MATLAB源代码)https://mbd.pub/o/bread/Z56XmJhs![]() https://mbd.pub/o/bread/Z56XmJhs
https://mbd.pub/o/bread/Z56XmJhs


















 3507
3507

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









