










文章目录
BEVFormer 是什么
BEVFormer 是将Transformer架构的自注意机制与BEV视图中3D检测结合起来的一种纯视觉目标检测方案。
将Transformer架构的自注意力机制应用到目标检测方案有 DETR,deformable DETR,其中deformable DETR 首次将可变形稀疏局部自注意力代替Transform原版的全局自注意机制,使得训练推理计算更加高效。
基于BEV视图中3D检测方案起初均是为点云目标检测服务,流行的方法有PointNet++,PointPillar,centerPoint,大致的思路就是将3D点云拍扁的2D的BEV栅格上,然后类似图像的特征上进行分类和回归。
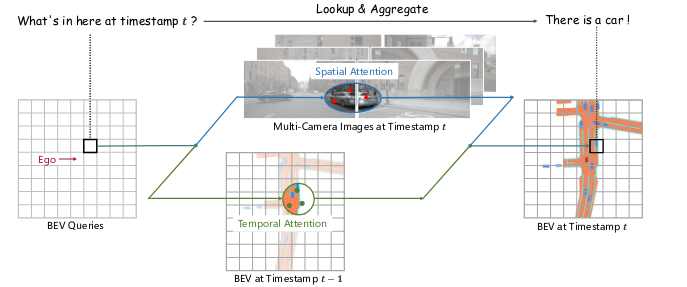
对于纯视觉的BEV检测方案,其中的重中之重就是如何将2D的图像特征映射到3D空间的BEV栅格,既然是映射关系,那就有前行投影和反向查询两种机制。前向投影是基于深度估计的方法,参考基于深度估计的BEV视图转换方法,典型代表为LSS。反向查询方法思路为先将BEV栅格在Z方向上进行lift提升,然后再映射到图像特征图上进行特征查询。BEVFormer 就是基于这种机制进行2D图像特征到3D空间的BEV栅格映射。
至于为什么要用BEV,什么是自注意力,什么是deformable attention,为什么要用纯视觉方案等等问题,这里不做详细解释,但是在看BEVformer之前,这些问题都是必现先搞明白的,特别是multiscale deformable attention ,因为整个BEVFormer最重要的encoder部分说白了就是在不停地做 deformable attention。
BEVFormer 流程
BEVFormer 的 Pipeline 分成几个部分:
1、Backbone: 主干网络提取图像多尺度特征。Backbone + FPN Neck 提取多个视角相机的多尺度特征。常用的有resnet50, resNet101-DCN等。
2、encoder: 完成2D图像多尺度特征映射到3D空间的BEV栅格。(包括 Temporal Self-Attention 模块和 Spatial Cross-Attention 模块。
3、Decoder: 在BEV栅格上完成 3D 目标检测的分类和定位任务, 类似Deformable DETR 的 Decoder
4、正负样本定义: 采用 Transformer 中常用的匈牙利匹配算法,Focal Loss + L1 Loss 的总损失和最小
5、损失函数: Focal Loss 分类损失 + L1 Loss 回归损失
BEVFormer 输入
输入的数据是一个 6 维的张量:(bs,queue,cam,C,H,W);
bs: batchsize
queue:连续帧的个数;相当加入时序信息,起到多帧特征融合效果,对遮挡起到很好效果。所以加入网络的数据除当前帧之外,还有之前几帧的数据。
cam: 相机的个数,即每一帧包含图像的数量。例如nuScenes数据集而言,由于一辆车带有六个环视相机传感器,可以实现 360° 全场景的覆盖。cam = 6
C,H,W:图像通道数,图像高度,图像宽度
backbone 特征提取
提取某一帧对应的所有环视图像的多尺度特征。
对应代码如下,取出对应历史帧图像,将 bs * cam 作为新的bs送到backbone网络提取多尺度特征,返回后,再把 bs * cam 的维度再拆成 bs,cam。即可得到某一queue的特征。
# 输入图片信息 tensor: (bs, queue, cam, c, h, w)
# 通过 for loop 方式一次获取单帧对应的六张环视图像
# 送入到 Backbone + Neck 网络提取多尺度的图像特征
for idx in range(tensor.size(1) - 1): # 利用除当前帧之外的所有帧迭代计算 `prev_bev` 特征
single_frame = tensor[:, idx, :] # (bs, cam, c, h, w)
# 将 bs * cam 看作是 batch size,将原张量 reshape 成 4 维的张量
# 待 Backbone + Neck 网络提取多尺度特征后,再把 bs * cam 的维度再拆成 bs,cam
single_frame = single_frame.reshape(bs * cam, c, h, w)
feats = Backbone(FPN(single_frame))
""" feats 是一个多尺度的特征列表 """
[0]: (bs, cam, 256, h / 8, w / 8)
[1]: (bs, cam, 256, h / 16, w / 16)
[2]: (bs, cam, 256, h / 32, w / 32)
[3]: (bs, cam, 256, h / 64, w / 64)
encoder 核心
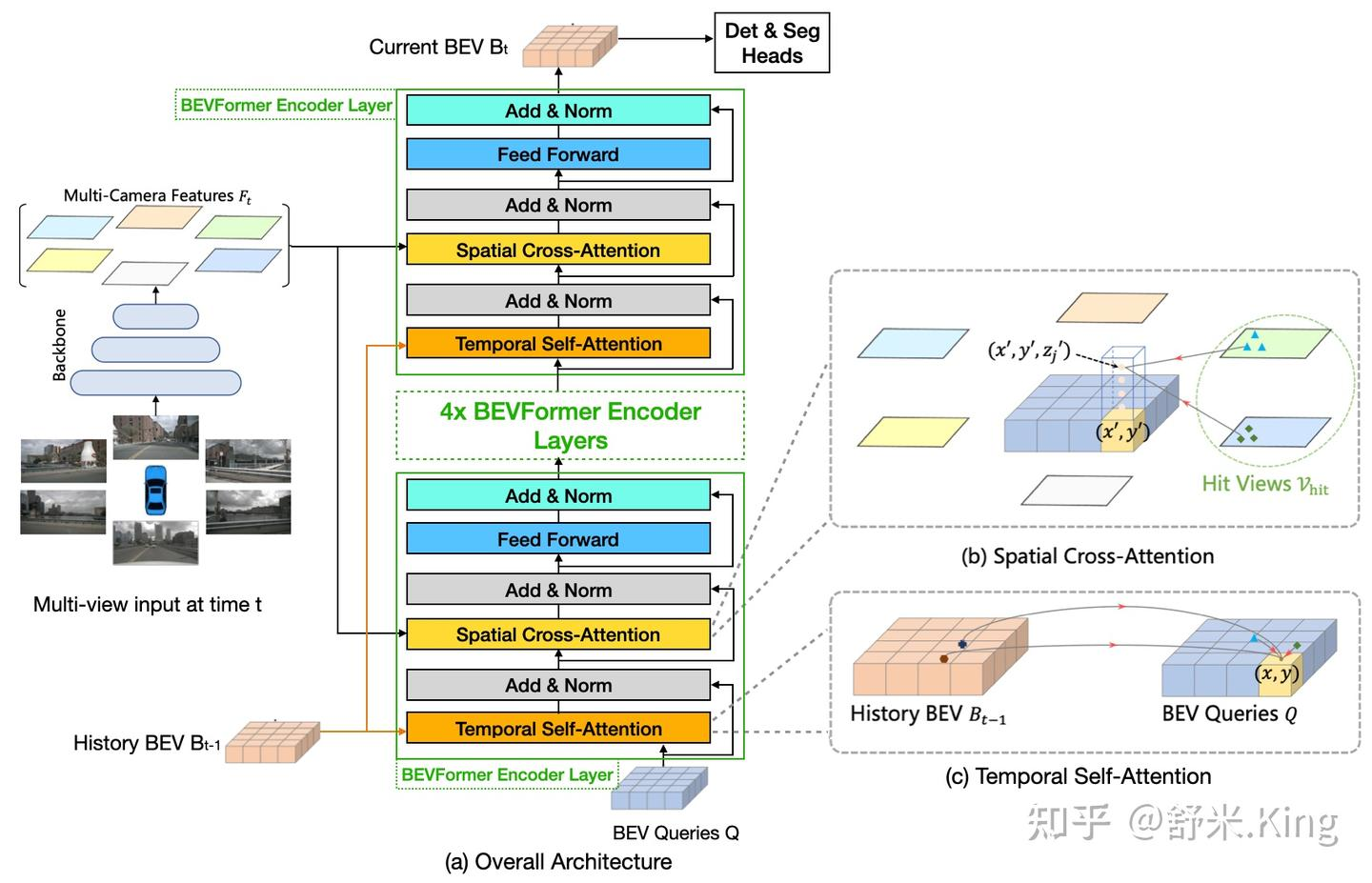
包含两个子模块 Temporal Self-Attention模块 以及 Spatial Cross-Attention模块;
Temporal Self-Attention 模块
主要做时序特征融合。
BEV Query 是什么?
可以理解 BEV Query 就是当前BEV特征。首先它是预定义的一组栅格(grid-shaped)可学习参数, Q ∈ R H × W × C Q \in R^{H \times W \times C} Q∈RH×W×C,它是对BEV感知空间的特征描述,当它完成学习以后,就变成了BEV 特征。
在Temporal Self-Attention模块,我们把历史BEV特征作为输入,与当前时刻的 BEV Query 进行融合,输出当前的 deformable attention 的Query特征。
对于一个deformable attention 模块,它处理数据的pipline 大致如下:
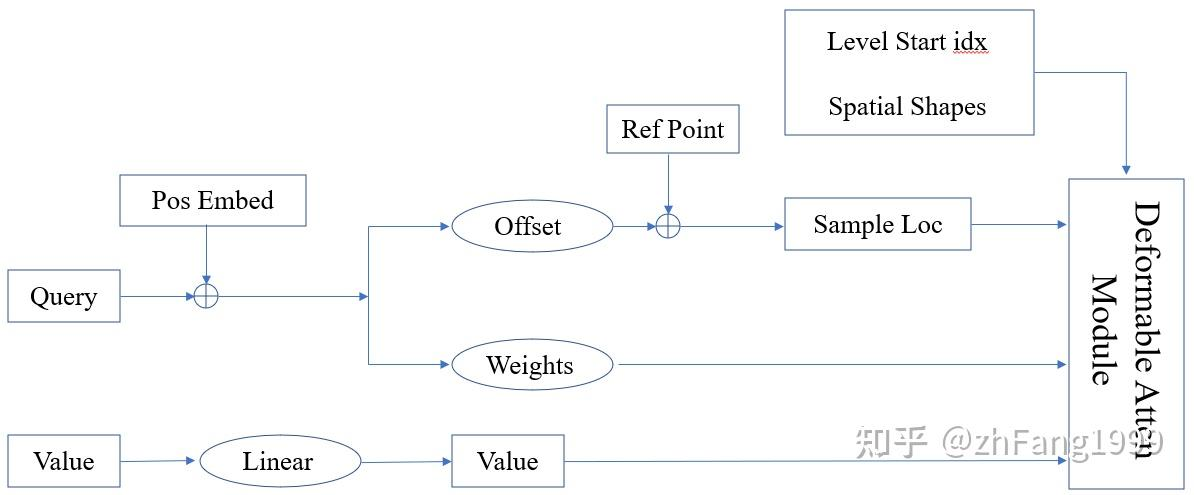
Deformable Attention Module CUDA 模块的输入分别是采样位置(Sample Location)、注意力权重(Attention Weights)、映射后的 Value 特征、多尺度特征每层特征起始索引位置、多尺度特征图的空间大小(便于将采样位置由归一化的值变成绝对位置);
对于 Temporal Self-Attention 模块而言,需要 bev_query、bev_pos、prev_bev、ref_point、value等参数(需要用到的参数参考 Deformable Attention Pipeline 图解)
代码实现:
bev_query:
一个完全 learnable parameter,通过 nn.Embedding() 函数得到,形状 shape = (200 * 200,256);200,200 分别代表 BEV 特征平面的长和宽。
bev_pose:
一个完全 learnable parameter。先分别产生行、列编码,再通过 cat 形成二维位置编码,相比直接生成二维位置编码节省了大量参数。
""" bev_pose 的生成过程 """
# w, h 分别代表 bev 特征的空间尺寸 200 * 200
x = torch.arange(w, device=mask.device)
y = torch.arange(h, device=mask.device)
# self.col_embed 和 self.row_embed 分别是两个 Linear 层,将(200, )的坐标向高维空间做映射
x_embed = self.col_embed(x) # (200, 128)
y_embed = self.row_embed(y) # (200, 128)
# pos shape: (bs, 256, 200, 200)
pos = torch.cat((x_embed.unsqueeze(0).repeat(h, 1, 1), y_embed.unsqueeze(1).repeat(1, w, 1)), dim=-1).permute(2, 0, 1).unsqueeze(0).repeat(mask.shape[0], 1, 1, 1)
prev_bev
历史时刻BEV特征
ref_point
ref_point 是参考点,也就是说当前BEV特征需要参考前一时刻的 BEV 特征的位置。
如果没有输入 prev_bev(第一帧没有前一时刻的 BEV 特征)的情况,其 ref_point = ref_2d;
对于存在输入 prev_bev 的情况,其 ref_point = ref_2d + shift;
ref_2d 是在相对BEV网格下的归一化坐标位置,即对于每一个BEV网格整型索引(i,j)都对应一个归一化的二维坐标位置。
shift 是历史帧BEV 相对当前帧 BEV的偏移
由于车身不断运动,而BEV是相对自车建立起来的坐标系,所以前后 BEV 在空间上的特征是不对齐的。为了实现两个时刻特征的空间对齐,需要用到 can_bus 数据中有关车自身旋转角度和偏移的信息。根据车辆的CAN_bus数据,计算从上一帧到当前帧的平移距离(translation_length)、平移方向(translation_angle)和旋转角度(bev_angle)。
对于相对车也在运动的物体的特征,这部分对齐需要自注意力模块去学习和修正。
"""shift 参数的生成"""
# obtain rotation angle and shift with ego motion
delta_x = kwargs['img_metas'][0]['can_bus'][0]
delta_y = kwargs['img_metas'][0]['can_bus'][1]
ego_angle = kwargs['img_metas'][0]['can_bus'][-2] / np.pi * 180
rotation_angle = kwargs['img_metas'][0]['can_bus'][-1]
grid_length_y = grid_length[0]
grid_length_x = grid_length[1]
translation_length = np.sqrt(delta_x ** 2 + delta_y ** 2)
translation_angle = np.arctan2(delta_y, delta_x) / np.pi * 180
if translation_angle < 0:
translation_angle += 360
bev_angle = ego_angle - translation_angle
shift_y = translation_length * \
np.cos(bev_angle / 180 * np.pi) / grid_length_y / bev_h
shift_x = translation_length * \
np.sin(bev_angle / 180 * np.pi) / grid_length_x / bev_w
shift_y = shift_y * self.use_shift
shift_x = shift_x * self.use_shift
shift = bev_queries.new_tensor([shift_x, shift_y]) # shape (2,)
# 通过`旋转`和`平移`变换实现 BEV 特征的对齐,对于平移部分是通过对参考点加上偏移量`shift`体现的
if prev_bev is not None:
if prev_bev.shape[1] == bev_h * bev_w:
prev_bev = prev_bev.permute(1, 0, 2)
if self.rotate_prev_bev:
num_prev_bev = prev_bev.size(1)
prev_bev = prev_bev.reshape(bev_h, bev_w, -1).permute(2, 0, 1) # sequence -> grid
prev_bev = rotate(prev_bev, rotation_angle, center=self.rotate_center)
prev_bev = prev_bev.permute(1, 2, 0).reshape(bev_h * bev_w, num_prev_bev, -1)
"""ref_2d 参数的生成,常规的 2D 网格生成的规则坐标点"""
ref_y, ref_x = torch.meshgrid(torch.linspace(0.5, H - 0.5, H, dtype=dtype, device=device),
torch.linspace(0.5, W - 0.5, W, dtype=dtype, device=device))
ref_y = ref_y.reshape(-1)[None] / H
ref_x = ref_x.reshape(-1)[None] / W
ref_2d = torch.stack((ref_x, ref_y), -1)
ref_2d = ref_2d.repeat(bs, 1, 1).unsqueeze(2)
value
value 就是对应着bev_query去查询的特征。
当存在prev_bev时, value = [prev_bev,bev_query], ref_point = [ref_2d + shift,ref_2d], 将当前bev_query 与历史BEV特征融合。
当不存在prev_bev时,value = [bev_query,bev_query],ref_point = [ref_2d,ref_2d]。
bev_query = [value[0],bev_query]
所以整个attention 计算的是prev_bev以及bev_query自身的相似性,最后得到的两组bev_query结果做一下平均,得到当前attetion 输出。
进入到内部 Deformable Attention Module CUDA 模块 时的内部参数 Offset、Weights、 Sample Location 都是由前面的参数学习或计算得到。
最后 level = 1 。在deformable attention 中提到 level 为多尺度特征的层数,这里BEV特征只有一层,且代表真实3D空间信息,不需要多尺度。所以level = 1。
所以在进入 Deformable Attention Module CUDA 模块前的运算如下:
""" bev_query 按照通道维度进行 concat """
query = torch.cat([value[0:1], query], -1) # (bs, 40000, 512) 初始query 256 维, 月value[0] cat 后变成 512 维
""" value 经过 Linear 做映射 """
value = self.value_proj(value)
""" offsets 以及 attention weights 的生成过程 """
# sampling_offsets: shape = (bs, num_query, 8, 1, 4, 2) # num_query=200*200, 8个head, layer = 1, 每个点采样个数为 4
# 对 query 进行维度映射得到采样点的偏移量
sampling_offsets = self.sampling_offsets(query).view(bs, num_query, self.num_heads, self.num_levels, self.num_points, 2)
# 对 query 进行维度映射得到注意力权重
attention_weights = self.attention_weights(query).view(bs, num_query, self.num_heads, self.num_levels * self.num_points)
attention_weights = attention_weights.softmax(-1)
# attention_weights: shape = (bs, num_query, 8, 1, 4)
attention_weights = attention_weights.view(bs, num_query, self.num_heads, self.num_levels, self.num_points)
""" sample location 的生成过程
通过代码可以观察到两点:
1. 通过 query 学到的 sampling_offsets 偏移量是一个绝对量,不是相对量,所以需要做 normalize;
2. 最终生成的 sampling_locations 是一个相对量;
"""
offset_normalizer = torch.stack([spatial_shapes[..., 1], spatial_shapes[..., 0]], -1)
sampling_locations = reference_points[:, :, None, :, None, :] \
+ sampling_offsets / offset_normalizer[None, None, None, :, None, :]
进入 Deformable Attention Module CUDA 模块运算,输出bev query
""" 各个参数的 shape 情况
1. value: (2,40000,8,32) # 2: 代表前一时刻的 BEV 特征和后一时刻的 BEV 特征,两个特征在计算的过程中是互不干扰的,
# 40000: 代表 bev_query 200 * 200 空间大小的每个位置
# 8: 代表8个头,# 32: 每个头表示为 32 维的特征
2. spatial_shapes: (200, 200) # 方便将归一化的 sampling_locations 反归一化
3. level_start_index: 0 # BEV 特征只有一层
4. sampling_locations: (2, 40000, 8, 1, 4, 2)
5. attention_weights: (2, 40000, 8, 1, 4)
6. output: (2, 40000, 8, 32)
"""
output = MultiScaleDeformableAttnFunction.apply(value,
spatial_shapes,
level_start_index,
sampling_locations,
attention_weights,
self.im2col_step)
""" 最后将前一时刻的 bev_query 与当前时刻的 bev_query 做平均
output = output.permute(1, 2, 0)
output = (output[..., :bs] + output[..., bs:])/self.num_bev_queue
output 就是当前时刻经过 Temporal Self-Attention 模块输出的bev_query,将作为Spatial Cross-Attention 模块的输入。
Spatial Cross-Attention 模块
Spatial Cross-Attention 将图像特征加进来,将2D的多尺度图像特征映射到BEV栅格上。
query 查询机制
Spatial Cross-Attention 采用的是反向查询机制获得图像特征。同时它查询的位置信息不是单纯通过内外参获得的固定位置,而是类似deformable attention 的方式通过学习offset获得参考点周围信息的查询位置。而参考点就是通过内外参建立起来的。
所以Spatial Cross-Attention 其实也是一个deformable attention 机制。它的输入输出与Temporal Self-Attention 相似。不同的是不需要 bev_pos 参数,因为它的bev_query 来自Temporal Self-Attention 的输出,已经添加了bev_pos 信息。只需要 bev_query、ref_point、value(就是 concat 到一起的多尺度图像特征)
bev_query
来自Temporal Self-Attention 的输出。
value
多尺度图像特征,这一部分在multiscale deformable attention 中介绍过, 就是将各个尺度的图像特征flatten()展平,然后concat 在一起作为value, 方便后面的查询。
图像特征加入相机编码 和 尺度层 编码 然后flatten() 、 concat(), 并记下每个特征层的起止位置,后面的查询需要。
""" 首先将多尺度的特征每一层都进行 flatten() """
for lvl, feat in enumerate(mlvl_feats):
bs, num_cam, c, h, w = feat.shape
spatial_shape = (h, w)
feat = feat.flatten(3).permute(1, 0, 3, 2) # (cam, bs, sum(h*w), 256)
if self.use_cams_embeds: #图像特征加入相机编码
feat = feat + self.cams_embeds[:, None, None, :].to(feat.dtype)
feat = feat + self.level_embeds[None, None, lvl:lvl + 1, :].to(feat.dtype) #图像特征加入特征层编码
spatial_shapes.append(spatial_shape)
feat_flatten.append(feat)
""" 对每个 camera 的所有层级特征进行汇聚 """
feat_flatten = torch.cat(feat_flatten, 2) # (cam, bs, sum(h*w), 256)
spatial_shapes = torch.as_tensor(spatial_shapes, dtype=torch.long, device=bev_pos.device)
# 计算每层特征的起始索引位置
level_start_index = torch.cat((spatial_shapes.new_zeros((1,)), spatial_shapes.prod(1).cumsum(0)[:-1]))
# 维度变换
feat_flatten = feat_flatten.permute(0, 2, 1, 3) # (num_cam, sum(H*W), bs, embed_dims)
ref_point
因为我们查询的是2D的图像特征,所以参考点当然是对应到图像上,所以实际的 参考点是 reference_points_cam。
但是3D的BEV空间如何对应到2D的图像上,就需要通过相机内外参进行建模。
1、首先建立3维坐标参考点 : ref_3d坐标点
我们的bev_query 是2维的栅格,我们需要把它与真实自车坐标下的空间联系起来,并以此建立query对应的3维坐标参考点。
(1)、在BEV栅格Z轴方向上进行 lift 提升,选取4个坐标点,这样就是获得了BEV空间的高度信息,进而能映射到对应的高度特征。
(2)、根据BEV空间的建模范围(实际检测的空间距离:前、后、左、右、上)将对应的实际空间坐标对应到 BEV 3维网格上得到ref_3d。
""" ref_3d 坐标生成 """
zs = torch.linspace(0.5, Z - 0.5, num_points_in_pillar, dtype=dtype, device=device).view(-1, 1, 1).expand(num_points_in_pillar, H, W) / Z
xs = torch.linspace(0.5, W - 0.5, W, dtype=dtype, device=device).view(1, 1, W).expand(num_points_in_pillar, H, W) / W
ys = torch.linspace(0.5, H - 0.5, H, dtype=dtype, device=device).view(1, H, 1).expand(num_points_in_pillar, H, W) / H
ref_3d = torch.stack((xs, ys, zs), -1) # (4, 200, 200, 3) (level, bev_h, bev_w, 3) 3代表 x,y,z 坐标值
ref_3d = ref_3d.permute(0, 3, 1, 2).flatten(2).permute(0, 2, 1) # (4, 200 * 200, 3)
ref_3d = ref_3d[None].repeat(bs, 1, 1, 1) # (1, 4, 200 * 200, 3)
# ref_3d:
# zs: (0.5 ~ 8-0.5) / 8
# xs: (0.5 ~ 50-0.5) / 50
# ys: (0.5 ~ 50-0.5) / 50
# return ref_3d
# ----------------------get_reference_points end----------------------
# ref_2d = self.get_reference_points(
# bev_h, bev_w, dim='2d', bs=bev_query.size(1), device=bev_query.device, dtype=bev_query.dtype)
# ---------------------get_reference_points start---------------------
ref_y, ref_x = torch.meshgrid(
torch.linspace(
0.5, bev_h - 0.5, bev_h, dtype=dtype, device=device),
torch.linspace(
0.5, bev_w - 0.5, bev_w, dtype=dtype, device=device)
)
ref_y = ref_y.reshape(-1)[None] / bev_h
ref_x = ref_x.reshape(-1)[None] / bev_w
ref_2d = torch.stack((ref_x, ref_y), -1)
ref_2d = ref_2d.repeat(bs, 1, 1).unsqueeze(2) # ref_2d其实就是ref_3d torch.Size([1, 4(4个高度), 50*50, 3(x,y,z)]) 去掉高度的一部分,
# bs, bev_h * bev_w, None, xy # torch.Size([1, 50*50, 1, 2])
# return ref_2d
# ----------------------get_reference_points end----------------------
# reference_points_cam, bev_mask = self.point_sampling(ref_3d, self.pc_range, kwargs['img_metas'])
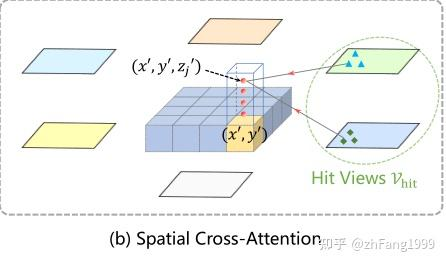
2、ref_3d坐标点投影到图像坐标上 : ref_3d 映射到 reference_points_cam
由于一个3d 点可能会被多个相机看到,所以需要将每一个3d 点都往所有的图像上投影,得到图像特征参考点,最后再通过 mask 筛选出有效的投影,得到reference_points_rebatch 。
ref_3d 映射到 reference_points_cam 代码如下:
""" BEV 空间下的三维坐标点向图像空间转换的过程
代码中的`lidar2img`需要有两点需要注意
1. BEV 坐标系 这里指 lidar 坐标系
2. 这里提到的`lidar2img`是经过坐标变换的,一般分成三步
第一步:lidar 坐标系 -> ego vehicle 坐标系
第二步:ego vehicle 坐标系 -> camera 坐标系
第三部:camera 坐标系 通过相机内参 得到像素坐标系
以上这三步用到的所有平移和旋转矩阵都合并到了一起,形成了 `lidar2img` 旋转平移矩阵
同时需要注意:再与`lidar2img`矩阵乘完,还需要经过下面两步坐标系转换,才是得到了三维坐标点在二维图像平面上的点
"""
# ------------------------point_sampling start------------------------
reference_points = ref_3d
# NOTE: close tf32 here.
allow_tf32 = torch.backends.cuda.matmul.allow_tf32
torch.backends.cuda.matmul.allow_tf32 = False
torch.backends.cudnn.allow_tf32 = False
lidar2img = []
for img_meta in ohb_img_metas:
lidar2img.append(img_meta['lidar2img']) # lidar2img 激光雷达到图像坐标的转换,将激光雷达坐标系当作自车坐标系
lidar2img = np.asarray(lidar2img)
lidar2img = reference_points.new_tensor(lidar2img) # torch.Size([1, 6, 4, 4]) 相机内外参合成一个矩阵4*4
reference_points = reference_points.clone()
# reference_points = ref_3d # normalize 0~1 # torch.Size([1, 4, 50*50, 3])
# pc_range = [-51.2, -51.2, -5.0, 51.2, 51.2, 3.0] 长102.4 宽102.4 高8
# 映射到自车坐标系下, 尺度被反归一化为真实尺度(米)
reference_points[..., 0:1] = reference_points[..., 0:1] * \
(pc_range[3] - pc_range[0]) + pc_range[0] # x 0~1 缩放到 0~102.4
reference_points[..., 1:2] = reference_points[..., 1:2] * \
(pc_range[4] - pc_range[1]) + pc_range[1] # y 0~1 缩放到 0~102.4
reference_points[..., 2:3] = reference_points[..., 2:3] * \
(pc_range[5] - pc_range[2]) + pc_range[2] # z 0~1 缩放到 0~8
# 变成齐次坐标
reference_points = torch.cat((reference_points, torch.ones_like(reference_points[..., :1])), -1)
# bs, num_points_in_pillar, bev_h * bev_w, xyz1 齐次坐标通过升维将平移纳入矩阵乘法 [x,y,z]-->[x,y,z,1]齐次坐标形式,为了和lidar2img[1, 6, 4, 4]做乘法
reference_points = reference_points.permute(1, 0, 2, 3)
# num_points_in_pillar, bs, bev_h * bev_w, xyz1
D, B, num_query = reference_points.size()[:3]
num_cam = lidar2img.size(1) # 6
reference_points = reference_points.view(D, B, 1, num_query, 4).repeat(1, 1, num_cam, 1, 1).unsqueeze(-1)
ref_3d = ref_3d[None].repeat(bs, 1, 1, 1) # bs, num_points_in_pillar, bev_h * bev_w, xyz # torch.Size([1, 4, 50*50, 3])
# bs, num_points_in_pillar, bev_h * bev_w, xyz # torch.Size([1, 4, 50*50, 3])
lidar2img = lidar2img.view(1, B, num_cam, 1, 4, 4).repeat(D, 1, 1, num_query, 1, 1)
# num_points_in_pillar, bs, num_cam, bev_h * bev_w, 4, 4
reference_points_cam = torch.matmul(lidar2img.to(torch.float32), reference_points.to(torch.float32)).squeeze(-1) # 每个 3D 点投影到 6 个相机上的齐次坐标 (u, v, s, 1)
# num_points_in_pillar, bs, num_cam, bev_h * bev_w, uvs1 s代表比例(x,y,s == kx,ky,ks s==1,x/s, y/s)
从3D投影到2D判断是否有效有两个条件:
1、投影射线与图像相交相机正前方,判断条件为 reference_points_cam[…, 2:3] > 0
2、投影射线与相机平面相交在像素范围内 , 归一化后的判断条件为:
(reference_points_cam[…, 1:2] > 0.0)
& (reference_points_cam[…, 1:2] < 1.0)
& (reference_points_cam[…, 0:1] < 1.0)
& (reference_points_cam[…, 0:1] > 0.0))
eps = 1e-5
# (level, bs, cam, num_query, 1)
bev_mask = (reference_points_cam[..., 2:3] > eps) # 只保留位于相机前方的点
# 齐次坐标下除以比例系数得到图像平面的坐标真值 : 将投影结果从 (u, v, s) 转换为实际的 2D 像素坐标 (x, y)
reference_points_cam = reference_points_cam[..., 0:2] / torch.maximum(
reference_points_cam[..., 2:3], torch.ones_like(reference_points_cam[..., 2:3]) * eps)
# num_points_in_pillar, bs, num_cam, bev_h * bev_w, uv
# 坐标归一化 都在0-1之间
reference_points_cam[..., 0] /= ohb_img_metas[0]['img_shape'][0][1]
reference_points_cam[..., 1] /= ohb_img_metas[0]['img_shape'][0][0]
# 去掉图像以外的点 先保证uv坐标都在0-1之间【在相机的视场内】 num_points_in_pillar, bs, num_cam, bev_h * bev_w, uv
bev_mask = (bev_mask & (reference_points_cam[..., 1:2] > 0.0)
& (reference_points_cam[..., 1:2] < 1.0)
& (reference_points_cam[..., 0:1] < 1.0)
& (reference_points_cam[..., 0:1] > 0.0))
前面获得了 bev_query , reference_points_cam, 实际应用上我们是通过 bev_mask 选取有用的参考点进行计算,提高计算效率和训练的收敛速度。所以将 bev_query 整合成 queries_rebatch, reference_points_cam 整合成 reference_points_rebatch 进行计算。
bev_query 到 queries_rebatch
reference_points_cam 到 reference_points_rebatch
bev_mask : shape(cam=6, num_query=200200, level=4)
query: shape(bs=2, num_query=200200,256)
reference_points_cam: shape(cam=6, num_query=200*200, level=4 , xy = 2)
bev_mask 存储了 BEV 立体网格到每个相机的有效映射。例如一个BEV立体(x * y,z), 在第0、1个cam 上有映射,在第2、3个cam 上没有映射。所以对于任意一个BEV栅格下(x, y)映射到某个相机上,然后在Z方向上求和,为0说明 BEV栅格(x,y)在此相机没有有效映射。也就是说当前(x,y)处对应的bev_query 在此相机无效。依据这种方法,找到每一个相机上有效的bev_query 和有效的reference_points_cam。
对应代码为: index_query_per_img = mask_per_img[0].sum(-1).nonzero().squeeze(-1)
例如每个cam有效bev_query 索引如下:
cam0: 0,1,2,3… 100
cam1: 50,51,52… 100, 101, 150
cam2:100,101,…200
…
也就是 BEV 栅格索引为50的能同时被cam0 和 cam1同时看到,索引为120的能同时被cam1 和 cam2同时看到, 以此类推
得到每个相机的有效索引后,构建所有相机的queries_rebatch和reference_points_rebatch。
对应代码为:queries_rebatch[j * self.num_cams + i, :len(index_query_per_img)] = query[j, index_query_per_img]
indexes = []
# 根据每张图片对应的`bev_mask`结果,获取有效query的index
for i, mask_per_img in enumerate(bev_mask):
index_query_per_img = mask_per_img[0].sum(-1).nonzero().squeeze(-1) # 获得每个相机的有效query的index
indexes.append(index_query_per_img) # 为每个相机存储有效的query index
queries_rebatch = query.new_zeros([bs * self.num_cams, max_len, self.embed_dims]) #构建 queries_rebatch, 假设每个相机对应的最大有效query个数为max_len
reference_points_rebatch = reference_points_cam.new_zeros([bs * self.num_cams, max_len, D, 2])
for i, reference_points_per_img in enumerate(reference_points_cam):
for j in range(bs):
index_query_per_img = indexes[i]
# 重新整合 `bev_query` 特征,记作 `query_rebatch, 为每个相机赋予响应的有效query
queries_rebatch[j * self.num_cams + i, :len(index_query_per_img)] = query[j, index_query_per_img]
# 重新整合 `reference_point`采样位置,记作`reference_points_rebatch`
reference_points_rebatch[j * self.num_cams + i, :len(index_query_per_img)] = reference_points_per_img[j, index_query_per_img]
产生进入Deformable Attention Module CUDA 模块前的内部参数
有queries_rebatch和reference_points_rebatch之后,就可以类似Temporal Self-Attention 一样去产生内部参数Offset、Weights、Sample Locations
下面用的 query 指代的是上面提到的 quries_rebatch, num_query = max_len。
""" 获取 sampling_offsets,依旧是对 query 做 Linear 做维度的映射,但是需要注意的是
这里的 query 指代的是上面提到的 `quries_rebatch` """
# sample 8 points for single ref point in each level.
# sampling_offsets: shape = (bs, max_len, 8, 4, 8, 2)
sampling_offsets = self.sampling_offsets(query).view(bs, num_query, self.num_heads, self.num_levels, self.num_points, 2)
attention_weights = self.attention_weights(query).view(bs, num_query, self.num_heads, self.num_levels * self.num_points)
attention_weights = attention_weights.softmax(-1)
# attention_weights: shape = (bs, max_len, 8, 4, 8)
attention_weights = attention_weights.view(bs, num_query,
self.num_heads,
self.num_levels,
self.num_points)
""" 生成 sampling location """
offset_normalizer = torch.stack([spatial_shapes[..., 1], spatial_shapes[..., 0]], -1)
reference_points = reference_points[:, :, None, None, None, :, :]
sampling_offsets = sampling_offsets / offset_normalizer[None, None, None, :, None, :]
sampling_locations = reference_points + sampling_offsets
Spatial Cross-Attention 模块输出bev_embedding特征
在 queries_rebatch 和 reference_points_rebatch 上进行查询的,最后仍需要将这些分配到每一个相机上的query整合到统一的BEV栅格上,并且求平均获得当前BEV栅格的query。
例如 BEV栅格索引=50 处的能同时被cam0 和 cam1同时看到, 那它的query来自cam0 和 cam1。
对应代码:
slots[j, index_query_per_img] += queries[j * self.num_cams + i, :len(index_query_per_img)]
"""
1. value: shape = (cam = 6, sum(h_i * w_i) = 30825, head = 8, dim = 32)
2. spatial_shapes = ([[116, 200], [58, 100], [29, 50], [15, 25]])
3. level_start_index= [0, 23200, 29000, 30450]
4. sampling_locations = (cam, max_len, 8, 4, 8, 2)
5. attention_weights = (cam, max_len, 8, 4, 8)
6. output = (cam, max_len, 8, 32)
"""
output = MultiScaleDeformableAttnFunction.apply(value, spatial_shapes, level_start_index, sampling_locations,
attention_weights, self.im2col_step)
"""最后再将六个环视相机查询到的特征整合到一起,再求一个平均值 """
for i, index_query_per_img in enumerate(indexes):
for j in range(bs): # slots: (bs, 40000, 256)
slots[j, index_query_per_img] += queries[j * self.num_cams + i, :len(index_query_per_img)]
count = bev_mask.sum(-1) > 0
count = count.permute(1, 2, 0).sum(-1)
count = torch.clamp(count, min=1.0)
slots = slots / count[..., None] # maybe normalize.
slots = self.output_proj(slots)
至此Spatial Cross-Attention 模块结束
将 Temporal Self-Attetion 模块和 Spatial Cross-Attention 模块堆叠在一起,当前 Spatial Cross-Attention 的 bev_embedding输出作为下一个Temporal Self-Attetion的输入, 并重复六次,最终得到的 BEV Embedding 特征作为下游 3D 目标检测和道路分割任务的 BEV 空间特征。
Decoder
decoder 的输入来自encoder 六次堆叠后的 bev_embedding 输出。
decoder 模块其实也是一次Deformable attention,与 Temporal Self-Attetion 类似,都是在BEV 2D 栅格上进行查询和输出。思想来自Deformable DETR 。
学习预测框和分类
用 object_query_embed 来学习预测框和分类, 模型直接用 nn.Embedding() 生成一组(900,512)维的张量,将 512 维的张量分成两组,分别构成了query = (900,256)和query_pos = (900,256)。即最多预测900个目标。
输入需要 query, query_pos, referece_points
预测过程没有参考点referece_points,因为没有先验,只能靠网络自己学习。referece_points学习参考点的信息来自query_pos。
reference_points = self.reference_points(query_pos) # (bs, 900, 3) 3 代表 (x, y, z) 坐标
reference_points = reference_points.sigmoid() # absolute -> relative
init_reference_out = reference_points
decoder 的 Deformable attention 核心代码如下:
""" 由 query 生成 sampling_offsets 和 attention_weights """
sampling_offsets = self.sampling_offsets(query).view(
bs, num_query, self.num_heads, self.num_levels, self.num_points, 2) # (bs, 900, 8, 1, 4, 2)
attention_weights = self.attention_weights(query).view(
bs, num_query, self.num_heads, self.num_levels * self.num_points) # (bs, 900, 8, 4)
attention_weights = attention_weights.softmax(-1)
attention_weights = attention_weights.view(bs, num_query,
self.num_heads,
self.num_levels,
self.num_points) # (bs, 900, 8, 1, 4)
""" sampling_offsets 和 reference_points 得到 sampling_locations """
offset_normalizer = torch.stack(
[spatial_shapes[..., 1], spatial_shapes[..., 0]], -1)
sampling_locations = reference_points[:, :, None, :, None, :] \
+ sampling_offsets \
/ offset_normalizer[None, None, None, :, None, :]
""" 多尺度可变形注意力模块 """
# value: shape = (bs, 40000, 8, 32)
# spatial_shapes = (200, 200)
# level_start_index = 0
# sampling_locations = (bs, 900, 8, 1, 4, 2)
# attention_weights = (bs, 900, 8, 1, 4)
# output = (bs, 900, 256)
output = MultiScaleDeformableAttnFunction.apply(value, spatial_shapes, level_start_index, sampling_locations,
attention_weights, self.im2col_step)
查询特征输出 output = (bs, 900, 256)
经过全连接层(FFN网络)进行目标的分类和回归。
回归预测 10 个维度的含义为:[xc,yc,w,l,zc,h,rot.sin(),rot.cos(),vx,vy];[预测框中心位置的x方向偏移,预测框中心位置的y方向偏移,预测框的宽,预测框的长,预测框中心位置的z方向偏移,预测框的高,旋转角的正弦值,旋转角的余弦值,x方向速度,y方向速度];
decoder 级联
然后根据预测的偏移量,对参考点的位置进行更新,为级联的下一个 Decoder 提高精修过的参考点位置,核心代码如下:
if reg_branches is not None: # update the reference point.
tmp = reg_branches[lid](output) # (bs, 900, 256) -> (bs, 900, 10) 回归分支的预测输出
assert reference_points.shape[-1] == 3
new_reference_points = torch.zeros_like(reference_points)
# 预测出来的偏移量是绝对量
new_reference_points[..., :2] = tmp[..., :2] + inverse_sigmoid(reference_points[..., :2]) # 框中心处的 x, y 坐标
new_reference_points[..., 2:3] = tmp[..., 4:5] + inverse_sigmoid(reference_points[..., 2:3]) # 框中心处的 z 坐标
# 参考点坐标是一个归一化的坐标
new_reference_points = new_reference_points.sigmoid()
reference_points = new_reference_points.detach()
"""
最后将每层 Decoder 产生的特征 = (bs, 900, 256),以及参考点坐标 = (bs, 900, 3) 保存下来。
"""
if self.return_intermediate:
intermediate.append(output)
intermediate_reference_points.append(reference_points)
将层级的 bev_embedding特征以及参考点通过 for loop 的形式,一次计算每个 Decoder 层的分类和回归结果
bev_embed, hs, init_reference, inter_references = outputs
hs = hs.permute(0, 2, 1, 3) # (decoder_level, bs, 900, 256)
outputs_classes = []
outputs_coords = []
for lvl in range(hs.shape[0]):
if lvl == 0:
reference = init_reference
else:
reference = inter_references[lvl - 1]
reference = inverse_sigmoid(reference)
outputs_class = self.cls_branches[lvl](hs[lvl]) # (bs, 900, num_classes)
tmp = self.reg_branches[lvl](hs[lvl]) # (bs, 900, 10)
assert reference.shape[-1] == 3
tmp[..., 0:2] += reference[..., 0:2] # (x, y)
tmp[..., 0:2] = tmp[..., 0:2].sigmoid()
tmp[..., 4:5] += reference[..., 2:3]
tmp[..., 4:5] = tmp[..., 4:5].sigmoid()
tmp[..., 0:1] = (tmp[..., 0:1] * (self.pc_range[3] - self.pc_range[0]) + self.pc_range[0])
tmp[..., 1:2] = (tmp[..., 1:2] * (self.pc_range[4] - self.pc_range[1]) + self.pc_range[1])
tmp[..., 4:5] = (tmp[..., 4:5] * (self.pc_range[5] - self.pc_range[2]) + self.pc_range[2])
outputs_coord = tmp
outputs_classes.append(outputs_class)
outputs_coords.append(outputs_coord)
正负样本的定义
正负样本的定义用到的就是匈牙利匹配算法,分类损失和类似回归损失的总损失和最小;
损失函数
分类损失:交叉熵
cls_pred = cls_pred.sigmoid() # calculate the neg_cost and pos_cost by focal loss.
neg_cost = -(1 - cls_pred + self.eps).log() * (1 - self.alpha) * cls_pred.pow(self.gamma)
pos_cost = -(cls_pred + self.eps).log() * self.alpha * (1 - cls_pred).pow(self.gamma)
cls_cost = pos_cost[:, gt_labels] - neg_cost[:, gt_labels]
cls_cost = cls_cost * self.weight
回归损失:L1 Loss
self.reg_cost(bbox_pred[:, :8], normalized_gt_bboxes[:, :8])
参考链接:
万字长文理解纯视觉感知算法 —— BEVFormer
一文读懂BEVFormer论文
BEVFormer解读(提问版)

















 2958
2958

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









