







该博客主要参照论文:
链接:https://pan.baidu.com/s/1LzP2UNIHCm8RPg2eQX0rdQ
提取码:hiuc

文章目录
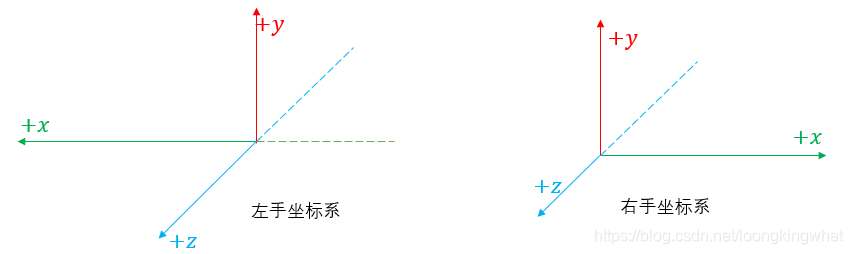
左手坐标系和右手坐标系之间的差异就是某一个坐标轴的方向取反,上图中是X轴取反。
和论文原文保持一致,我们以X轴取反为例分析,如何从左手坐标系转换到右手坐标系。其他的情况可以据此类推。
1.坐标点的转换
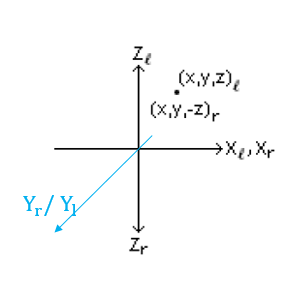
可以从图中看出,同一个小黑点,在左手坐标系中的坐标是(x,y,z),在右手坐标系中的坐标就是(x,y,-z)。
图中显示了左手坐标系中的点有一个正的z分量。在右手坐标系中,观察z分量必须为负。在矩阵向量形式中,从左手点q’到右手点qr的转换是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 657
657

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









