







lsd_slam配置方法,吐血整理
先贴一个LSD_SLAM官方网站:https://vision.in.tum.de/research/vslam/lsdslam
好多链接说按照github原作者的方案,但是很多错误。这也导致大家(也包括博主我走了很多弯路)
这里给出原作者github及给出的方法:https://github.com/tum-vision/lsd_slam/blob/master/lsd_slam_core/manifest.xml
网上其他博客给出的方法(基本不可用,rosmake都通不过,各种问题):
https://blog.csdn.net/xueyinhualuo/article/details/48490939
https://blog.csdn.net/gobitan/article/details/51541977
http://blog.sina.com.cn/s/blog_7b83134b0102w4de.html
https://blog.csdn.net/zhuquan945/article/details/72980831(有参考价值)
https://blog.csdn.net/zhuquan945/article/details/72980831(自己出现问题后可以参考这个教程解决部分问题)
网上一般的教程是这样的:
- $ sudo apt-get install python-rosinstall
- $ mkdir ~/rosbuild_ws
- $ cd ~/rosbuild_ws
- $ rosws init . /opt/ros/indigo
- $ mkdir package_dir
- $ rosws set ~/rosbuild_ws/package_dir -t .
- $ echo "source ~/rosbuild_ws/setup.bash" >> ~/.bashrc
- $ bash
- $ cd package_dir
- $ sudo apt-get install ros-indigo-libg2o ros-indigo-cv-bridge liblapack-dev libblas-dev freeglut3-dev libqglviewer-dev libsuitesparse-dev libx11-dev
- $ git clone https://github.com/tum-vision/lsd_slam.git lsd_slam
- $ rosmake lsd_slam
第一部分:配置环境,并使用配置好的数据包回放数据
先通过以下方法,仔仔catkin方式的lsd_slam
mkdir -p ~/catkin_ws/src git clone https://github.com/tum-vision/lsd_slam.git cd lsd_slam git checkout catkin
然后cd ~/catkin_ws
catkin_make
然后你看到的就是各种错误。。。。。。我的环境是ubutnu14.04+ROS indigo+opencv 2.4.9+eigen3+cmake3.2+gcc4.9.4
以下是我遇到的错误及解决办法:
(1)第一个错误
在编译过程中可能会出现错误:raise Exception(r"""quotes not allowed in description string '%s'""" % description)
顾名思义,不应该在描述中出现引号(单引号或双引号),可以通过查看错误内容得知需要修改的文件名:
1) lsd_slam_viewer/cfg/LSDSLAMViewerParams.cfg
第20行scaledDepthVarTH:单词 point's和keyframe's 中出现了单引号,删除单引号
第21行absDepthVarTH:单词 point's
第24行cutFirstNKf:单词 keyframe's
2) lsd_slam_core/cfg/LSDDebugParams.cfg
第11行plotStereoImages:单词 what's
第12行plotTracking:单词 what's
第48行continuousPCOutput:单词 Keyfram's
修改上述文件并保存,重新编译:
- rosmake lsd_slam
目前网上的解决办法是利用catkin_ws来构建
(参考链接:http://www.luohanjie.com/2017-03-17/ubuntu-install-lsd-slam.html;https://blog.csdn.net/zhuquan945/article/details/72980831)
具体步骤为:
mkdir -p ~/catkin_ws/src git clone https://github.com/tum-vision/lsd_slam.git cd lsd_slam git checkout catkin
安装依赖
sudo apt-get install ros-indigo-libg2o ros-indigo-cv-bridge liblapack-dev libblas-dev freeglut3-dev libqglviewer-dev libsuitesparse-dev libx11-dev
对lsd_slam/lsd_slam_viewer和lsd_slam/lsd_slam_core文件夹下的package.xml中添加:
<build_depend>cmake_modules</build_depend> <run_depend>cmake_modules</run_depend>
对lsd_slam/lsd_slam_viewer和lsd_slam/lsd_slam_core文件夹下的CMakeFiles.txt中添加:
find_package(cmake_modules REQUIRED)
并且在所有的target_link_libraries中添加X11,如:
target_link_libraries(lsdslam ${FABMAP_LIB} ${G2O_LIBRARIES} ${catkin_LIBRARIES} sparse cxsparse X11)
然后开始编译
cd ~/catkin_ws/ catkin_make
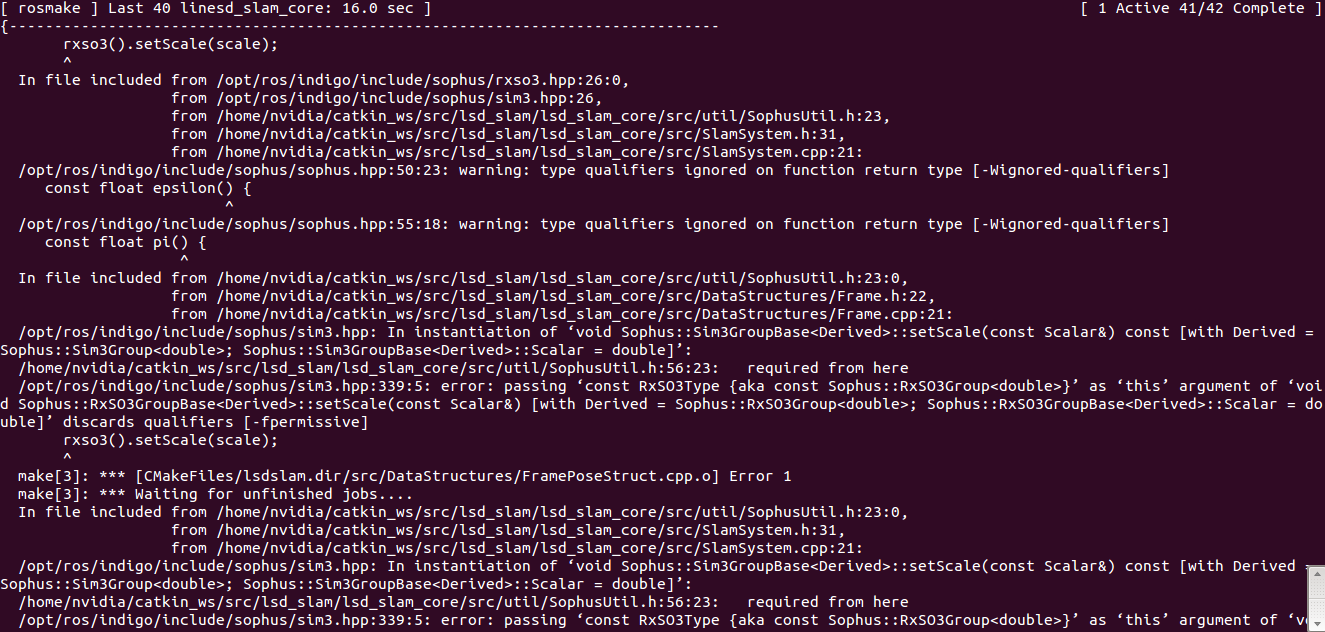
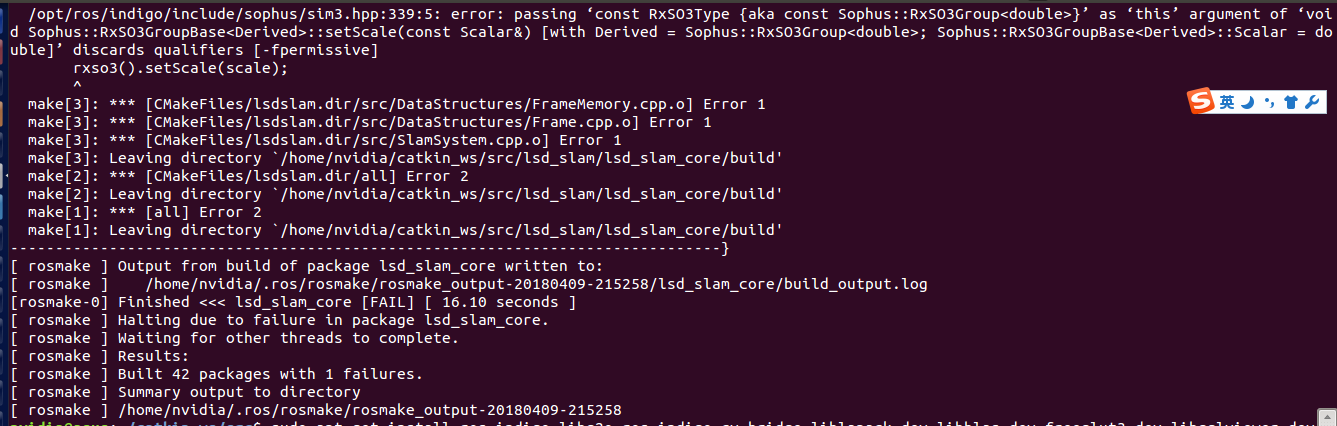
(3)这里再次出错
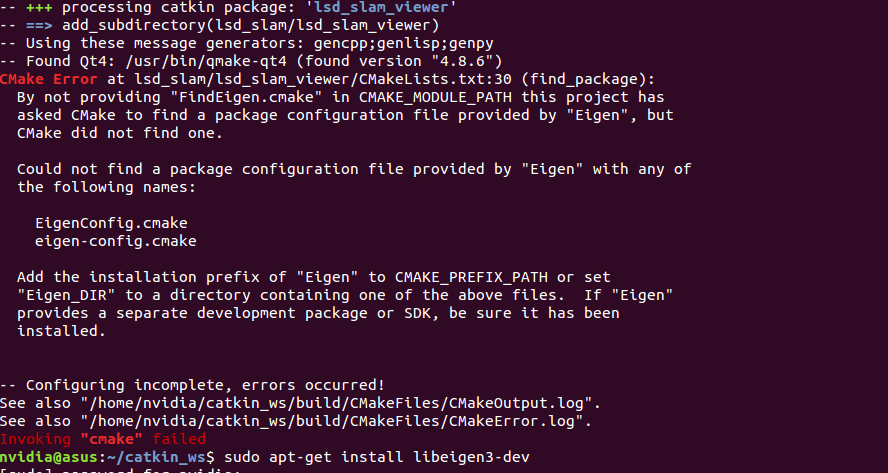
是找不到eigen目录,所以修改lsd_slam_core和lsd_slam_viewer两个目录下的CMakeLists.txt文件,将原来的find_package(Eigen REQUIRED)改为find_package(Eigen3 REQUIRED)
(4)再次编译catkin_make,上一条错误解决,又报错
根据提示,线程开的太多,直接用catkin_make -j1指定单线程编译

上条问题解决
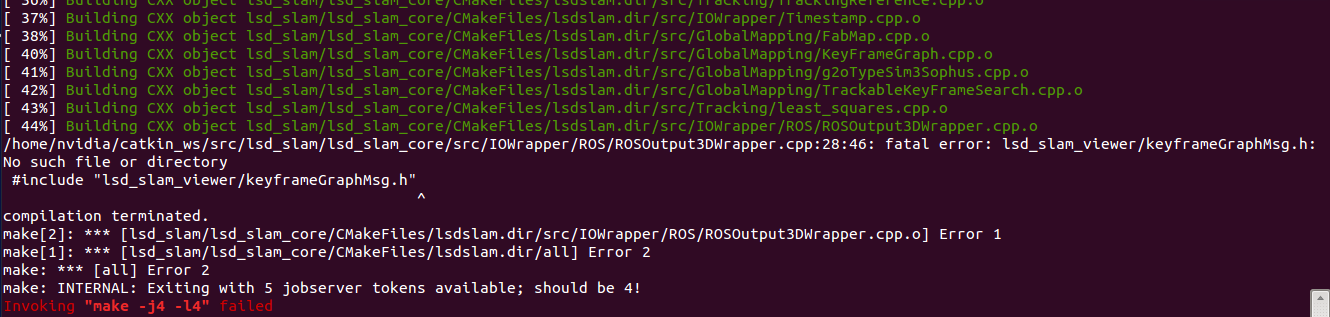
(5)又报错fatal error: Eigen/Core: No such file or directory,找不到eigen头文件。我们再次回到上述的两个CMakeLists.txt文件(lsd_slam_core和lsd_slam_viewer目录下)中,将对应的find_package和find_directiories修改为:
find_package(Eigen3 REQUIRED)
include_directories(${EIGEN3_INCLUDE_DIR})
之前我们改了包含的包是eigen3,但是没有修改对应的头文件,所以找不到了,我们把include中的eigen改为eigen3
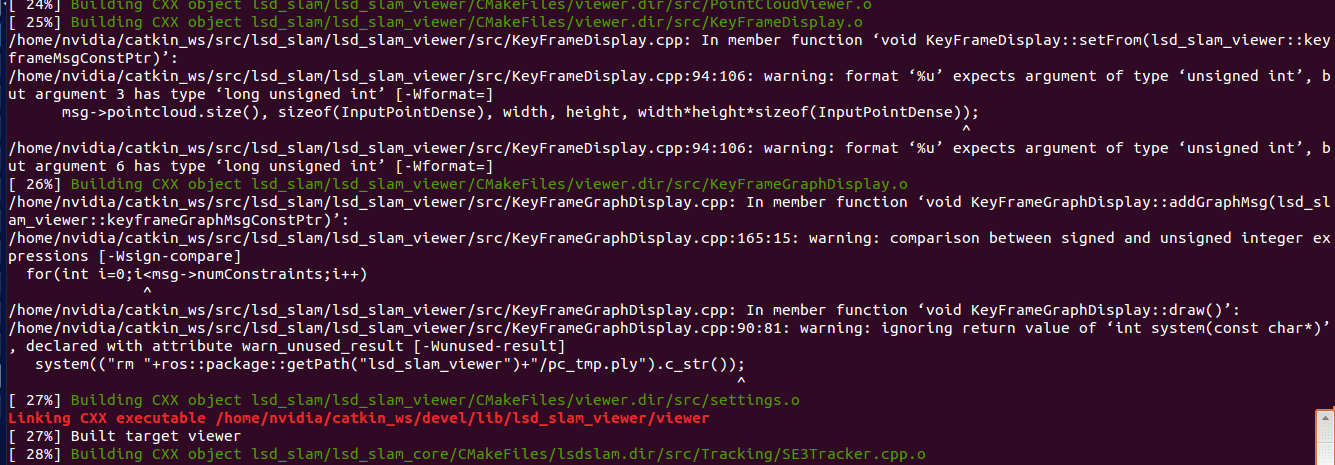
再次编译:catkin_make -j1,等待结果

哈哈哈,终于编译成功。接下来别忘了source一下:source ~/catkin_ws/devel/setup.bash
虽然中间有几个小的警告,应该也不碍事,暂且不管吧
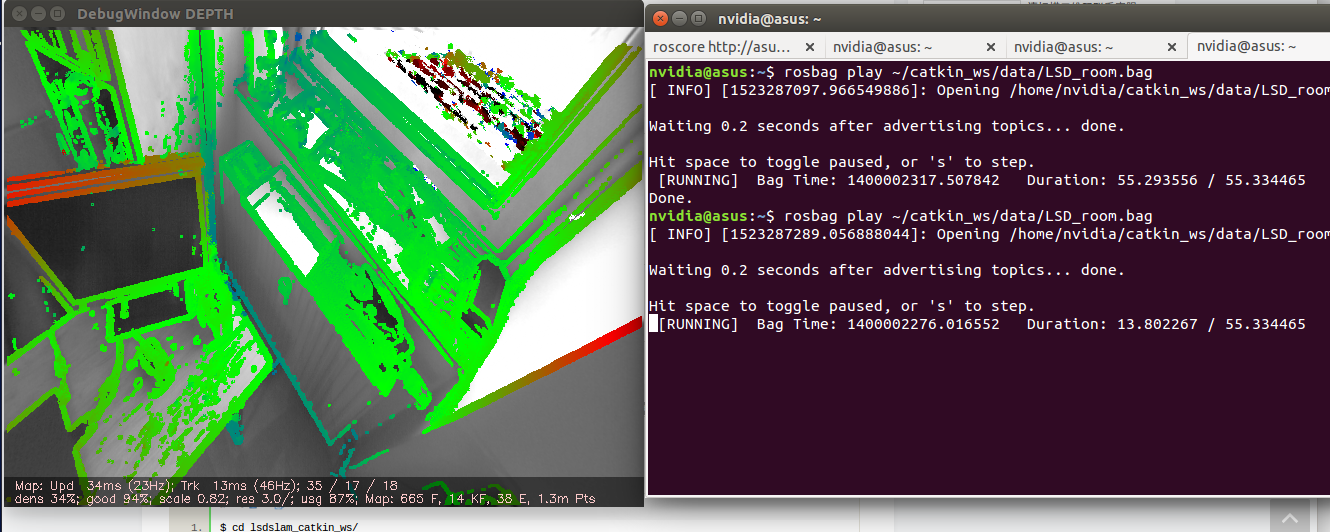
最后的最后,我们来看看运行demo效果
(6)demo运行步骤【参考博客:http://www.luohanjie.com/2017-03-17/ubuntu-install-lsd-slam.html】
下载数据包Download the Room Example Sequence and extract it.
数据集:http://vision.in.tum.de/research/vslam/lsdslam?redirect=1
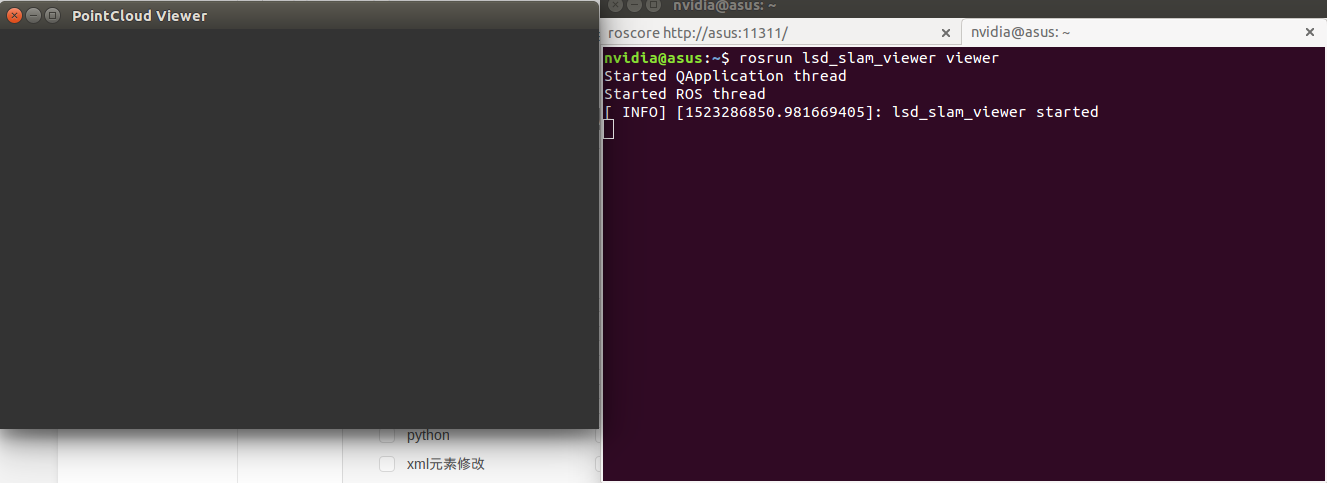
- 开第一个终端,运行roscore
- 开第二个终端,运行rosrun lsd_slam_viewer viewer,打开点云查看器
- 打开第三个终端:rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=camera_info _calib:=/home/nvidia/catkin_ws/src/lsd_slam/lsd_slam_core/calib/OpenCV_example_calib.cfg
- 接下来,开第四个终端,rosbag play ~/Your path/LSD_room.bag (第一步下载的数据包)
第二部分、使用自己的摄像头跑lsd_slam
//http://www.luohanjie.com/2017-03-17/ubuntu-install-lsd-slam.html
1、安装驱动
cd ~/catkin_ws/ source devel/setup.sh cd ~/catkin_ws/src git clone https://github.com/ktossell/camera_umd.git cd .. catkin_make
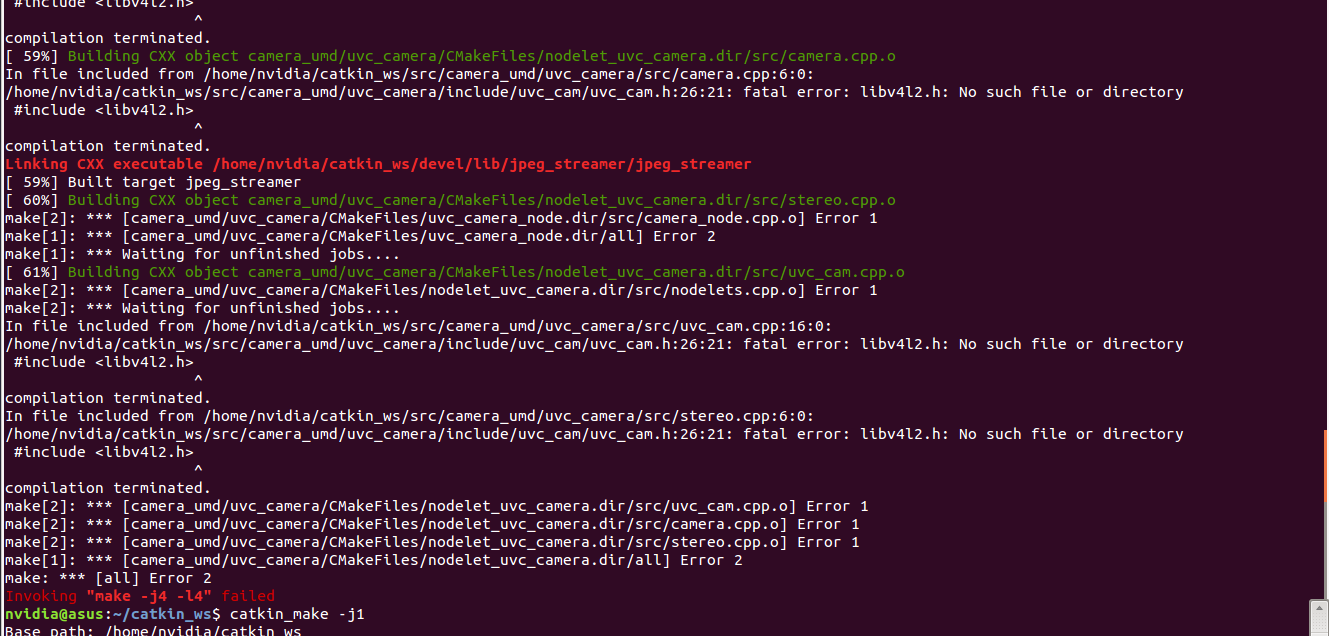
xatkin_make -j1

fatal error: libv4l2.h: No such file or directory
解决方法:安装驱动libv4l-dev,sudo apt-get install libv4l-dev,完成
具体步骤:
- 开第一个终端,运行roscore
- 开第二个终端,运行rosrun lsd_slam_viewer viewer,打开点云查看器
- 打开第三个终端,运行rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=camera_info _calib:=/home/nvidia/catkin_ws/src/lsd_slam/lsd_slam_core/calib/OpenCV_example_calib.cfg【换成你自己的路径和参数】
- 然后开启摄像头,launch文件
roslaunch uvc_camera camera_node.launch
校正文件calibration_file可参考lsd_catkin_ws/src/lsd_slam/lsd_slam_core/calib中的cfg文件。
【第四步也可以直接使用rosrun uvc_camera uvc_camera_node device:=/dev/video0】
配置camera_node.launch文件(在/lsdslam_catkin_ws/src/camera_umd/uvc_camera/launch中),如:
- <launch>
- <node pkg="uvc_camera" type="uvc_camera_node" name="uvc_camera" output="screen">
- <param name="width" type="int" value="640" />
- <param name="height" type="int" value="480" />
- <param name="fps" type="int" value="30" />
- <param name="frame" type="string" value="wide_stereo" />
- <param name="auto_focus" type="bool" value="False" />
- <param name="focus_absolute" type="int" value="0" />
- <!-- other supported params: auto_exposure, exposure_absolute, brightness, power_line_frequency -->
- <param name="device" type="string" value="/dev/video0" />
- <param name="camera_info_url" type="string" value="file://$(find uvc_camera)/example.yaml" />
- </node>
- </launch>
注意:官方程序的默认分辨率是640*480.
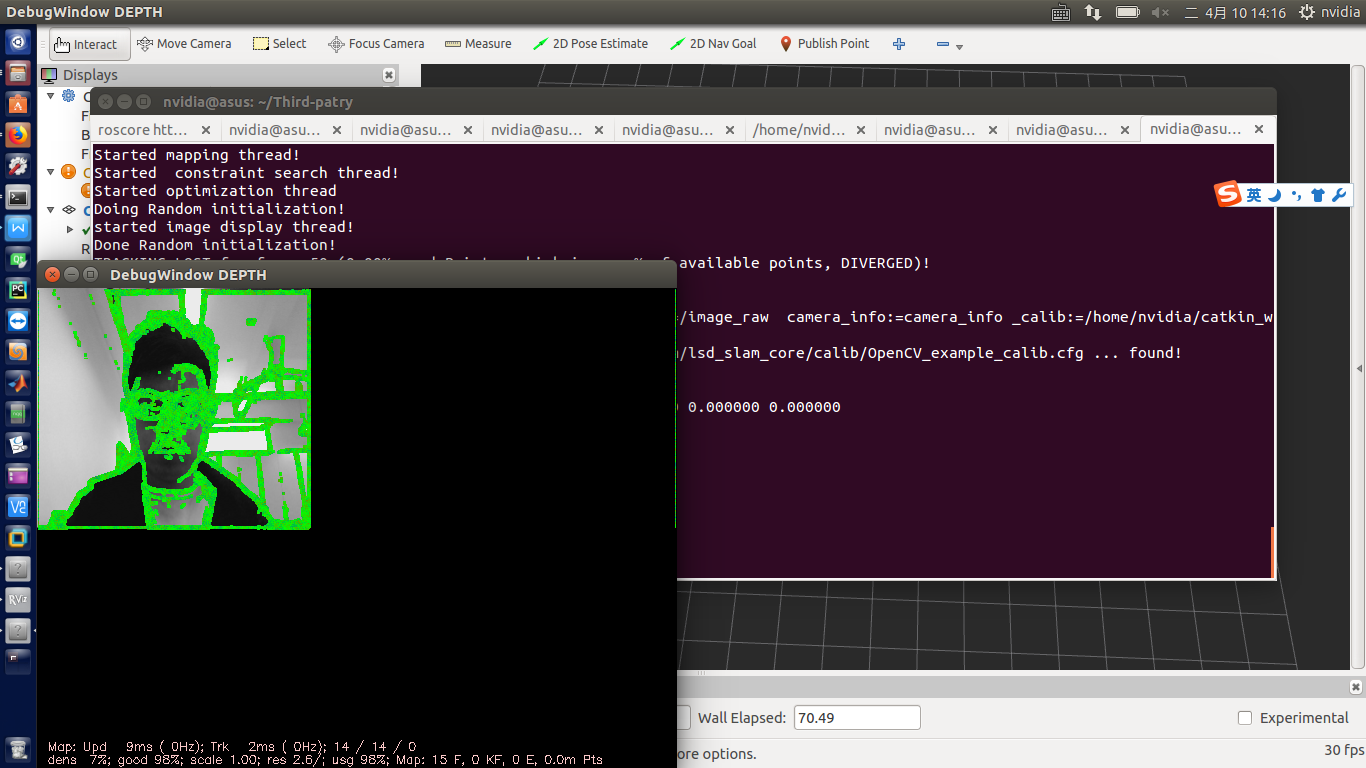
为什么不能持续显示呢? //TODO //自己标定相机
第三部分、使用openFabMap去闭环检测
//TODO
//https://blog.csdn.net/xueyinhualuo/article/details/48490939
//论文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









