







 本文详细介绍了IMU中的关键参数,如最大零点偏移、温度偏移、零偏稳定性、灵敏度等,以及它们在低成本和高精度应用中的差异,帮助用户理解和选择合适的IMU设备。
本文详细介绍了IMU中的关键参数,如最大零点偏移、温度偏移、零偏稳定性、灵敏度等,以及它们在低成本和高精度应用中的差异,帮助用户理解和选择合适的IMU设备。
0. 简介
现在的机器人领域在普遍使用IMU(惯性导航单元)。该系统有三个加速度传感器与三个角速度传感器(陀螺)组成,加速度计用来感受飞机相对于地垂线的加速度分量,陀螺仪用来感知飞机的角速率变化;通过算法融合来计算出飞行器姿态,也用来进行航位推算。而每次我们拿到一个惯性导航的时候会发现参数手册中有很多信息,而这些信息的好坏要怎么评判是比较关键的。下面我们来一一讲解。
1. 最大零点偏移
1.1 含义
IMU(惯性测量单元)的最大零点偏移是指在没有外部力或加速度作用下,IMU输出的测量值与真实值之间的差异。它是由于传感器的制造误差、温度变化、机械振动等因素引起的。
IMU的最大零点偏移是一个统计值,表示在一定的置信水平下,IMU输出值与真实值之间的最大差异。
1.2 指标
对于低成本的消费级IMU,其最大零点偏移范围可能在几个百分比以内,例如加速度计的零点偏移范围可能在±2%以内(对应就是±20mg),陀螺仪的零点偏移范围可能在±5°/s以内。
高精度的工业级或航空航天级IMU,其最大零点偏移范围会更小,通常在几个千分比以内。例如,加速度计的零点偏移范围可能在±0.1%(对应就是±1mg)以内,陀螺仪的零点偏移范围可能在±0.1°/s以内
2. 温度偏移
2.1 含义
IMU的温度偏移是指在不同温度下,IMU输出的测量值与真实值之间的差异。温度偏移是由于传感器的温度敏感性引起的,温度变化会影响传感器的性能和精度。
温度偏移通常以每度或每十度为单位,例如每度的温度偏移为X,表示每增加或减少1度时,IMU输出值可能会相应地增加或减少X。
2.2 指标
消费级IMU的温度偏移范围可能在几个百分比以内,例如加速度计的温度偏移范围可能在±0.2%(对应就是±2mg)以内,陀螺仪的温度偏移范围可能在±0.5°/s以内。
而高精度的工业级或航空航天级IMU的温度偏移范围会更小,通常在几个千分比以内。例如,加速度计的温度偏移范围可能在±0.05%(对应就是±0.5mg)以内,陀螺仪的温度偏移范围可能在±0.1°/s以内。
3. 零偏稳定性
3.1 含义
在零输入状态下的长时间稳态输出是一个平稳的随机过程,即稳态输出将围绕均值(零偏)起伏和波动,习惯上用均方差来表示,这种均方差被定义为零偏稳定性。
零偏漂移是指IMU测量值与真实值之间的偏差随时间的变化。通常,零偏漂移以每小时、每分钟或每秒钟的角度或速度单位来表示。
3.2 指标
加速度计:一般来说,高精度的加速度计的零偏稳定性可以达到几微米每秒平方(µg)级别。典型的高性能加速度计的零偏漂移可能在1 µg或更低。
陀螺仪:高精度的陀螺仪的零偏稳定性一般在几度每小时(°/hr)或更低。典型的高性能陀螺仪的零偏漂移可能在0.01°/hr或更低。
4. 灵敏度
4.1 含义
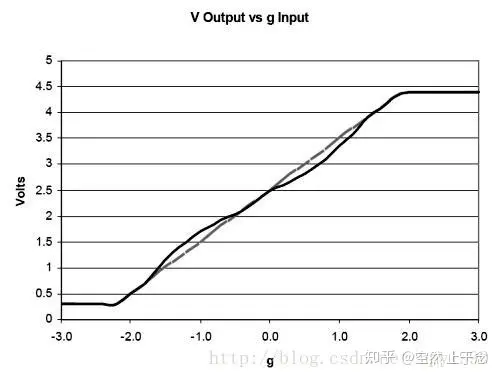
IMU的灵敏度是指传感器对于输入信号的变化的响应能力。对于加速度计来说,灵敏度表示单位输入加速度变化对应的传感器输出变化;对于陀螺仪来说,灵敏度表示单位输入角速度变化对应的传感器输出变化。
4.2 指标
加速度计:一般的加速度计灵敏度范围可达到几百到几千mV/g(毫伏每重力单位)。高精度的加速度计可能具有更低的灵敏度,可达到几十到几百mV/g。
陀螺仪:一般的陀螺仪灵敏度范围可达到几十到几百mV/°/s(毫伏每度每秒)。高精度的陀螺仪可能具有更低的灵敏度,可达到几到几十mV/°/s。


















 1480
1480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











