







参考自官方文档:Maintain source checkout — ROS 2 Documentation: Humble documentation
所以没事还是要多看看官方文档,可以收获很多东西.
首先可以新建一个目录用来保存ros2源码:
mkdir -p /ROS2/humble/src拉取repos文件,里面包含了ros2源码的一些代码仓库信息
cd ./ROS2/humble/
wget https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos长这个样子就是拉成功了,
ls之后可以发现多了个ros2.repos的文件.我们可以查看一下里面的内容:
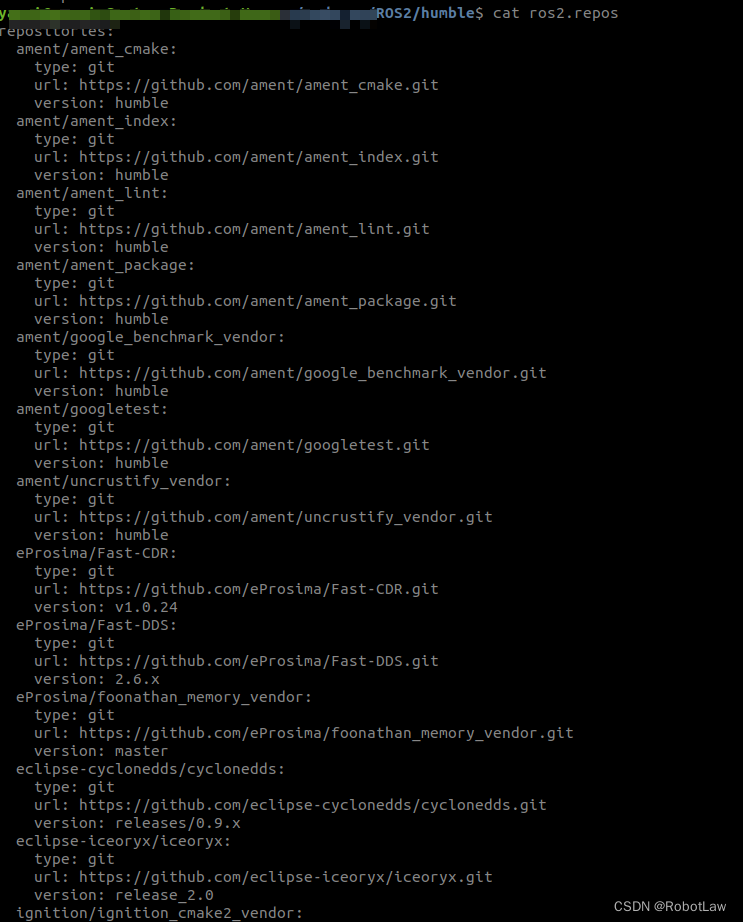
将ros2.repos里面的仓库导入到src目录下即可:
vcs import src < ros2.repos
下载完成后src长这个样子:
好了,接下来就可以愉快的开启源码研究之旅了...

















 294
294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









