









 本文介绍了机械臂坐标系的相关概念,包括六轴机械臂末端参数的表示方法,以及发那科和川崎机器人中刀具坐标系的具体定义。通过X、Y、Z表示位置,通过不同的旋转角度表示姿态。
本文介绍了机械臂坐标系的相关概念,包括六轴机械臂末端参数的表示方法,以及发那科和川崎机器人中刀具坐标系的具体定义。通过X、Y、Z表示位置,通过不同的旋转角度表示姿态。
机械臂末端参数(opencv):
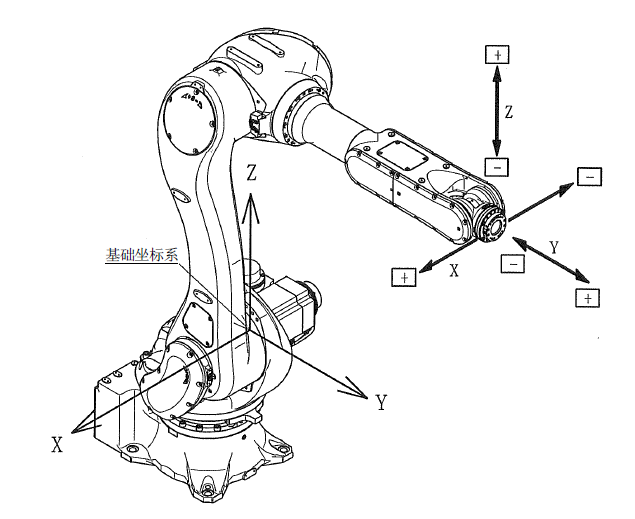
对于六轴机械臂而言,在控制器端通常会有六个参数表征当前机械臂末端的状态(x, y, z, rx, ry, rz),其中(x, y, z)表示以机械臂的基座为原点(0, 0, 0)的OXYZ坐标系下机械臂工具的坐标值,其中地面为xoy面,垂直方向为z轴,而(rx, ry, rz)表示末端工具分别围绕基座的x、y以及z轴旋转的角度,即欧拉角(eular)。
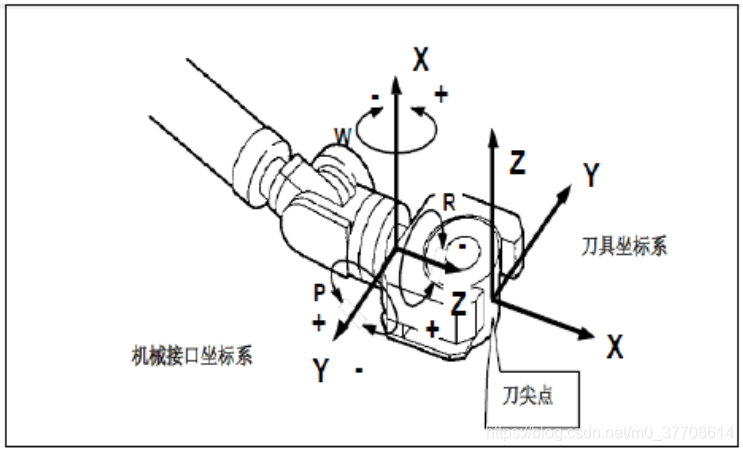
发那科机器人:
变化值(X,Y,Z,W,P,R)
刀具坐标系用来定义刀尖点(TCP)的位置和刀具姿势的坐标系。刀具坐标系通常以TCP为原点,将刀具方向取为Z轴,未定义刀具坐标系时,将基坐标系来替代该坐标系。刀具坐标系由刀尖点(TCP)的位置(X、Y、Z)和刀具的姿势(W、P、R)构成。刀尖点(TCP)的位置通过相对基坐标系的刀尖点的坐标值x、y、z来定义,刀具姿势通过基坐标系的X轴、Y轴、Z轴周围的旋转角W、P、R来定义。
川崎机器人:
变化值(X,Y,Z,O,A,T)
指机器人工具坐标系相对于基础坐标系的变化值。位置由基础坐标系的TCP的XYZ指给定,定向由基础坐标系的工具坐标的欧拉OAT角度给定。通常使用的转换值是:工具变换值,描述工具坐标系相对于空坐标系的姿态,基于工件的变化值,描述工具坐标系相对于工件坐标系的姿态。


















 6676
6676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











