







坐标控制
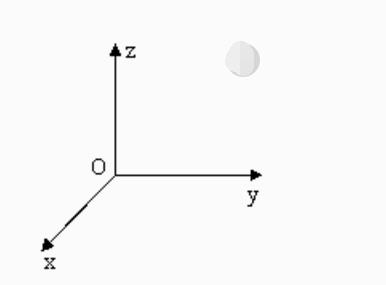
主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。分为[x,y,z,rx,ry,rz],其中[x,y,z]表示的是机械臂头部在空间中的位置(该坐标系为直角坐标系),[rx,ry,rz]表示的是机械臂头部在该点的姿态(该坐标系为欧拉坐标)。算法的实现以及欧拉坐标的表示需要一定的学术知识,这里不对其过多的讲解,我们只要懂得直角坐标系就可以很好的使用这个函数了。
注意: 在设置坐标时,不同系列的机械臂关节构造有所不同,同一组坐标,不同系列的机械臂会展示不同的姿态。
回到首页
目录
| 单个轴转动:1.1 send_coord(id,coord,speed) |
| 获取坐标:2.1 get_coords() | 移动到某位置:2.2 send_coords(coords, speed, mode) |
| 设置工具坐标系:2.3 set_tool_reference(coords) | 获取工具坐标系:2.4 get_tool_reference() |
| 获取世界坐标: |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 9965
9965

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











