







一、原理介绍
在传统直接转矩控制系统中,为了方便对控制量进行解耦控制,通常将定子磁链的给定幅值设置为定值。这样做只对负载角控制即可对永磁同步电动机的电磁转矩进行快速控制。但这种解耦的方法是照搬异步电动机的控制方法,且控制定子磁链幅值为定值带来了不必要的定子直轴电流,这样的直轴电流带来过大的电流幅值以外,还会容易对转子的永磁体产生去磁效应,影响电动机的稳定运行。同时直轴电流的存在会拉低电动机的功率因数。
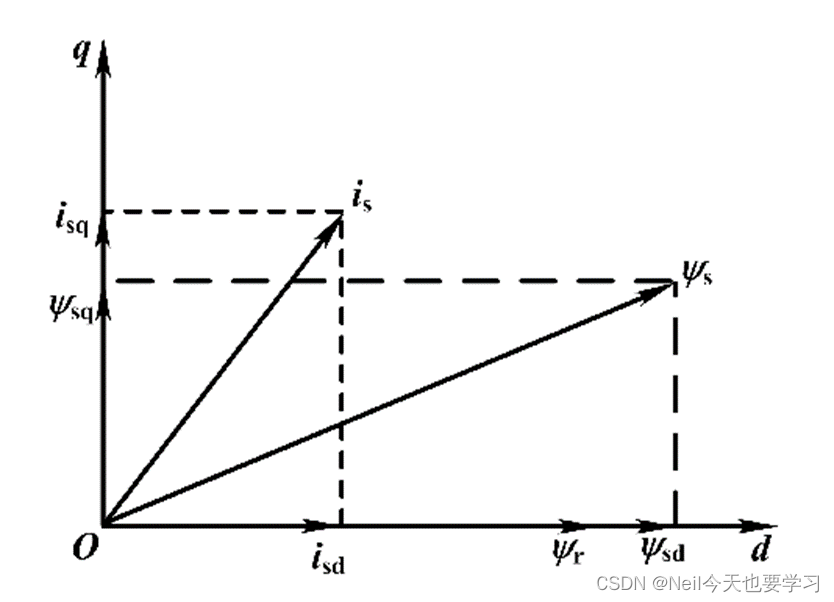
上图所示是传统 DTC 系统定子磁链矢量图。当控制定子磁链幅值为定值时,会存在直轴磁链,反映到电流上则为直轴电流。
考虑到电动机功率因数以及定子电流的大小,可以从系统的定子磁链幅值给定值下手,借鉴矢量控制取id=0的控制方法,将系统定子电流控制成id=0但是对于SVM-DTC 系统来说,系统框图中是没有电流环的,对电流不能直接控制,所以需要借助对定子磁链幅值的控制来达到使id=0的控制要求。
对比传统的直接转矩控制,利用非恒值磁链幅值给定的控制系统不仅可以防止永磁同步电动机去磁,还可以提高系统的功率因数。
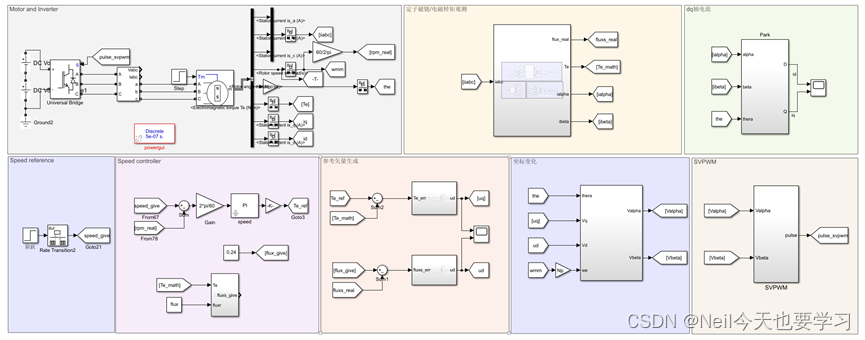
二、仿真模型
在MATLAB/simulink里面验证所提算法,在前文基于超螺旋滑模控制的DTC-SVM基础之上增加自适应磁链给定,当然在其他类型的DTC-SVM系统同样可以应用,只有需要定子磁链给定。采用和实验中一致的控制周期1e-4,电机部分计算周期为5e-7。仿真模型如下所示:
对比采用恒定磁链给定DTC-SVM与自适应磁链给定DTC-SVM
(前一个为恒定磁链给定DTC-SVM,后一个为自适应磁链给定DTC-SVM)
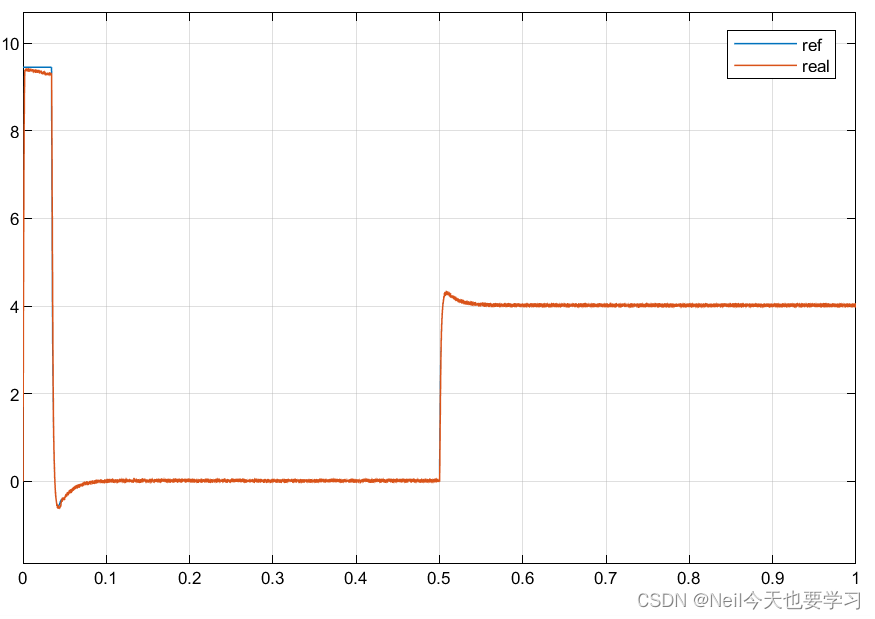
2.1给定转速与实际转速
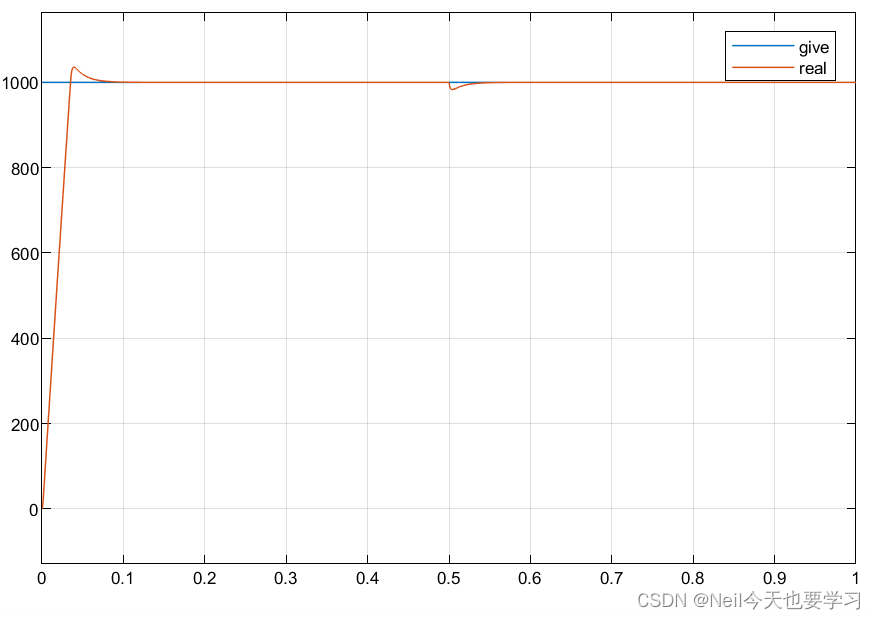

在转速跟踪方面,两种方案差别不大
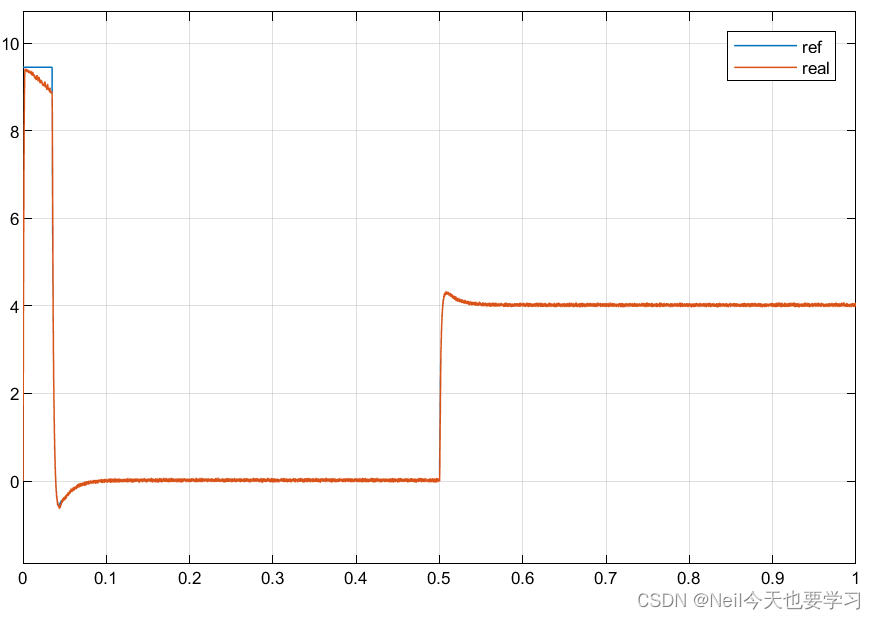
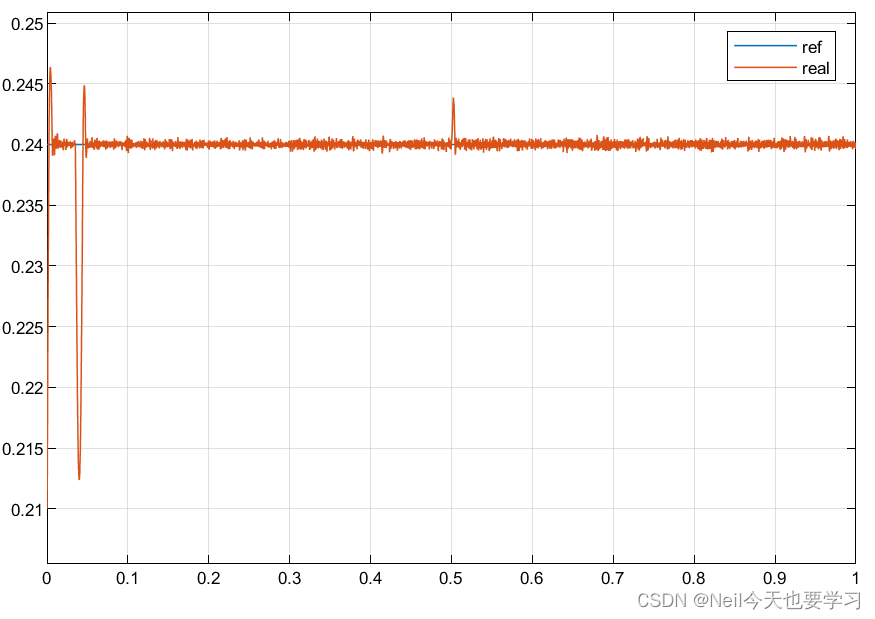
2.2给定电磁转矩与实际电磁转矩
2.3给定定子磁链与实际定子磁链
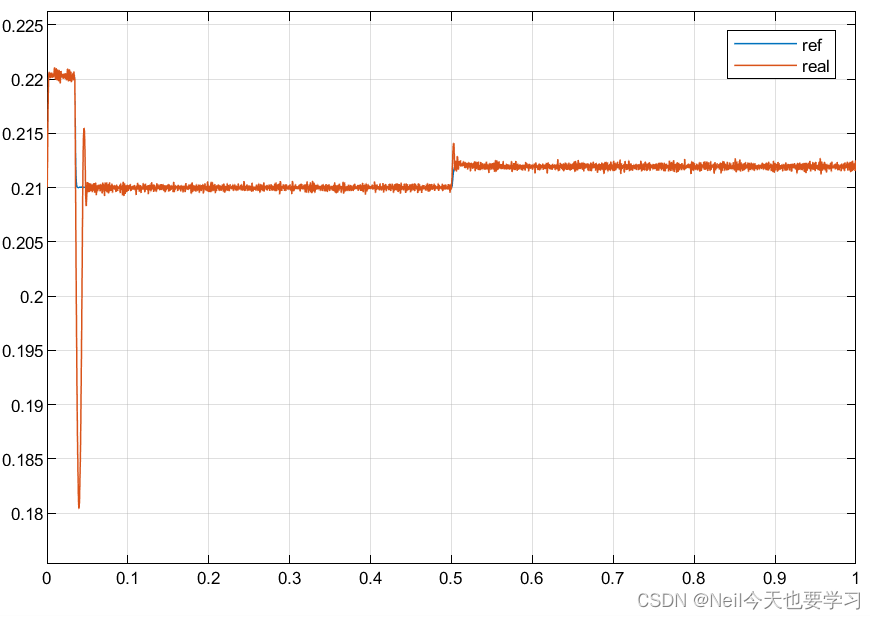 可以看到在自适应磁链给定DTC-SVM系统起动的时候,定子磁链的幅值比在稳定运行时候的定子磁链幅值要大。这样既保证了起动时有足够的起动转矩,也能因此保证系统的 d 轴电流无论在什么时候都能维持为零。
可以看到在自适应磁链给定DTC-SVM系统起动的时候,定子磁链的幅值比在稳定运行时候的定子磁链幅值要大。这样既保证了起动时有足够的起动转矩,也能因此保证系统的 d 轴电流无论在什么时候都能维持为零。
2.4dq轴电流
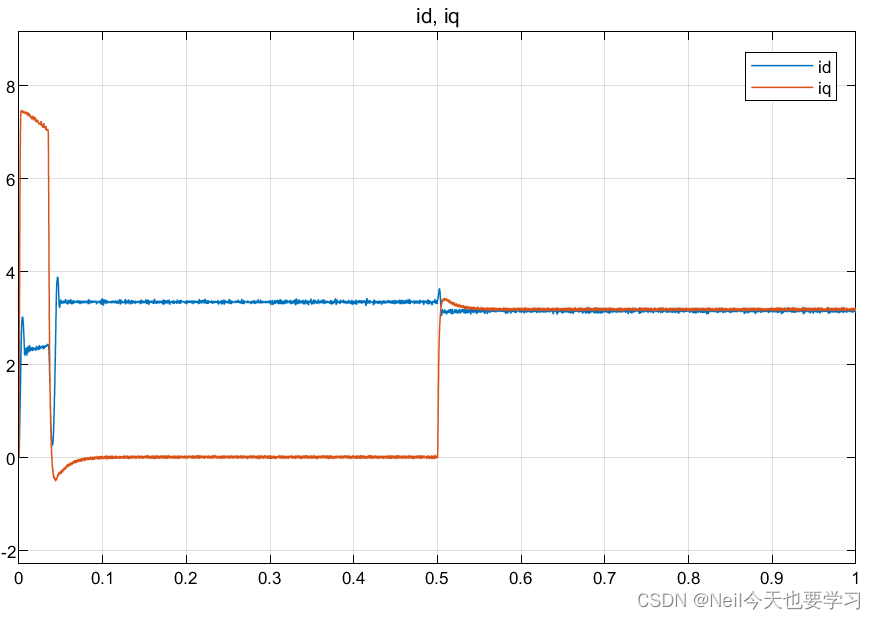
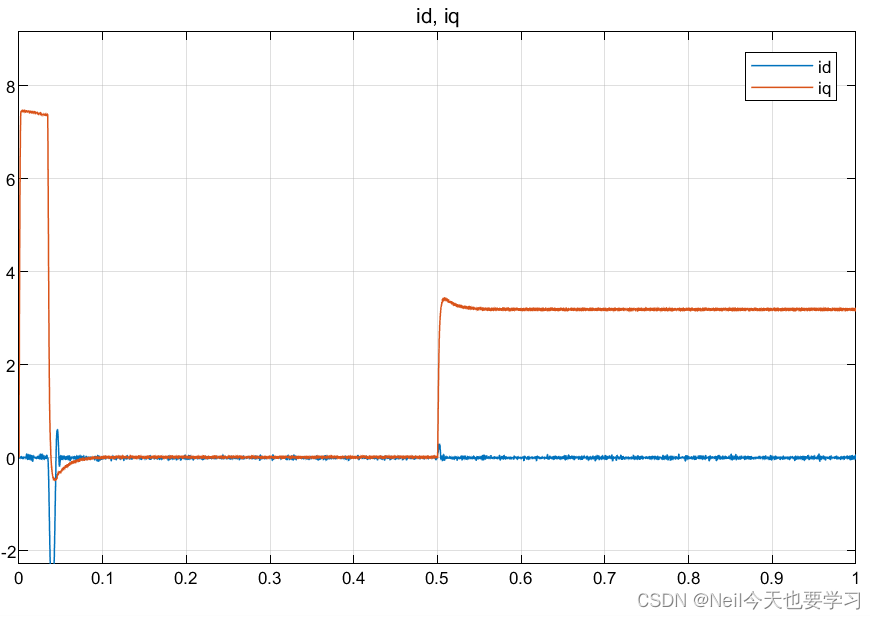
当采用恒定磁链幅值时,系统的 d轴电流无论在起动还是稳定运行时都不能为零,且会出现 d 轴电流为正的情况,容易对转子上的永磁体产生消磁效应。
2.5磁链相图
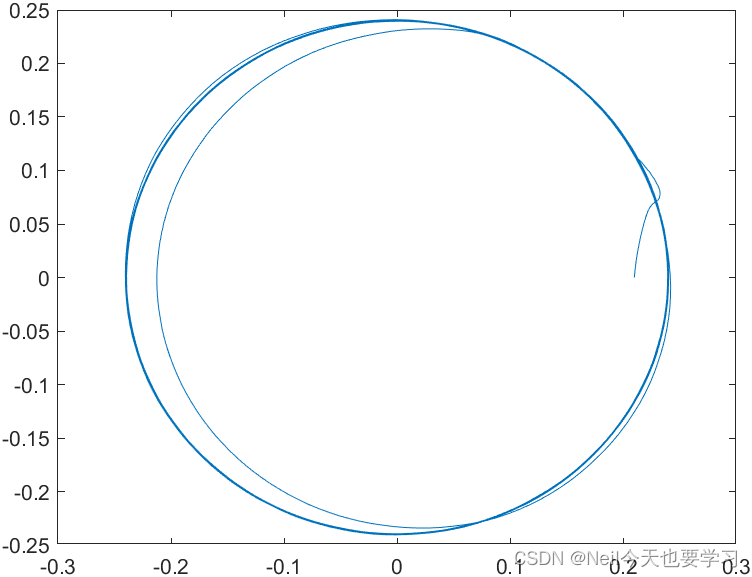
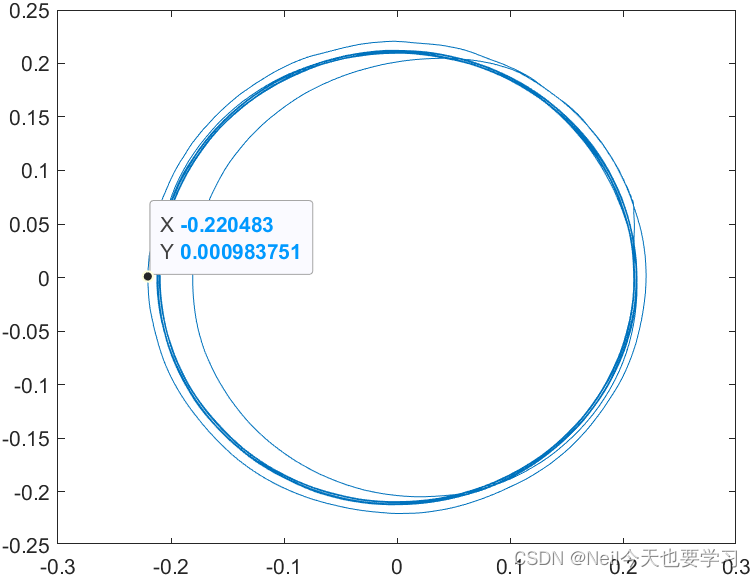
可以看出,在自适应磁链给定DTC-SVM磁链相图有幅值略大的一圈轨迹,对应系统起动,幅值也与其启动时略大的磁链给定相吻合。















 2726
2726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









