







 文章介绍了现代永磁同步电机控制中的模型参考自适应(MRAS)方法,包括原理、仿真模型和实际应用。重点讨论了转速辨识中的稳定性保证以及在参数变化情况下的性能。还探讨了MRAS的改进方向,如参数辨识和自适应律优化。
文章介绍了现代永磁同步电机控制中的模型参考自适应(MRAS)方法,包括原理、仿真模型和实际应用。重点讨论了转速辨识中的稳定性保证以及在参数变化情况下的性能。还探讨了MRAS的改进方向,如参数辨识和自适应律优化。
PMSM学习笔记
模型参考自适应(MRAS)是较为经典的一种无速度传感器控制方法,在袁雷《现代永磁同步电机控制原理及MATLAB仿真》一书中也有提及,经过本人在仿真和实验试验,在电机参数较为准确的情况下,电机能保持稳定运行。整理该方法原理及仿真效果如下:
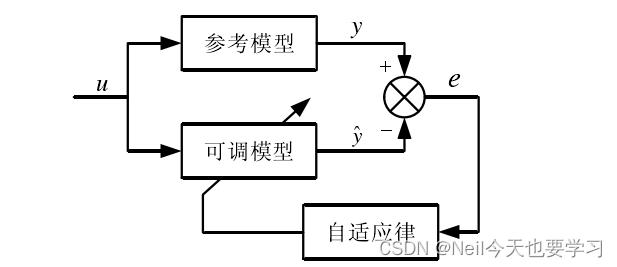
MRAS 的主要思想是,构建两个具有相同物理意义输出量的模型,其中以不含未知参数的电机方程作参考模型,而将含有待估参数的方程作可调模型,利用两模型输出量的差值构建适当的自适应律来实时调节可调模型的参数,使得可调模型的输出跟踪参考模型的输出。MRAS 结构图如图所示:
在 MRAS 转速辨识中,系统和转速的渐近收敛由 Popov 超稳定性来保证,对Popov 积分不等式做逆向求解即可得到由 PI 调节器控制的转速估算公式。
PMSM同步旋转坐标系(dq轴)下的电流方程为
以上方程为电机实际运行的描述,即PMSM本身,作为MRAS的参考模型,为了便于通过矩阵描述,对上述方程进行变换
令
如此,参考模型方程可以变为
将其写成状态空间方程形式
其中
设计包含估计转速和估计电流的电流方程作为可调模型
其状态空间方程形式为
其中分别为估计电角速度,估计d轴电流,估计q轴电流
定义广义误差为,将参考模型电流方程与可调模型电流方程相减得到
其中,再改写为以下形式
其中 ,
将上式改写为标准的前向环节状态方程
根据上式可建立一个等效的 MRAS 反馈结构,其由一个线性定常正向环节和一个非线性时变反馈环节构成,如下图所示:
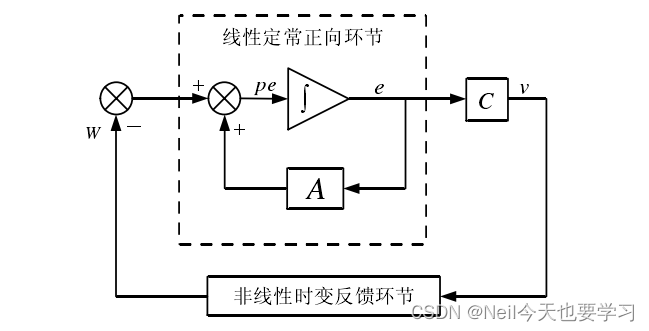
根据 Popov 超稳定性理论,要使上述系统稳定必须满足以下条件:
1、线性定常环节传递矩阵必须为严格正实矩阵
2、 非线性时变反馈环节必须满足 Popov 积分不等式
证明过程略
对 Popov 积分不等式逆向求解即可得到 MRAS 转速估算系统的自适应律,其结果为
对估计转速积分得到估计转角
在自适应律的调解下,估计电流和估计转速向实际值收敛,但是从可调模型中可以看出,方程中使用了电机电气参数比如电阻、电感、转子磁链,虽然离线状态下可以通过一些方法较为准确地辨识出电气参数,但随着电机运行时间的增加或电机本身环境较为恶劣,会导致电机参数变化,进而影响参数准确性,导致出现转角估计静差等,严重时会导致电机失控
在MATLAB/simulink中搭建离散仿真模型(看了网上好多分享MRAS的均搭建的是连续模型,个人感觉意义不大)
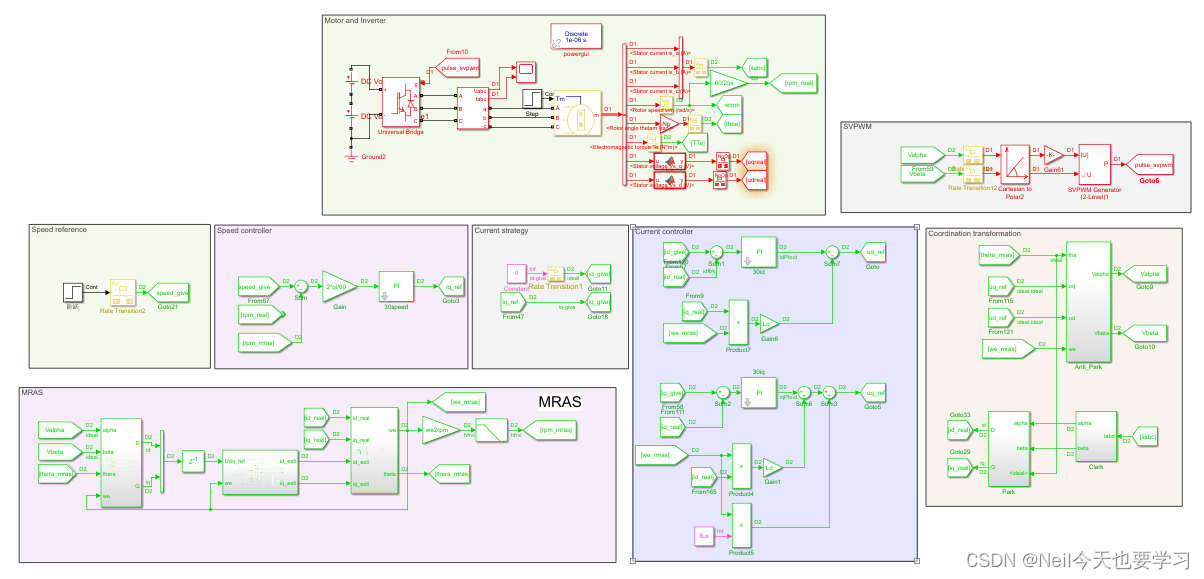
设置电机初始给定转速为600rpm,0.2s时加满载,0.5时给定转速阶跃到1200rpm,算法反馈转速和转角均采用MRAS估计值闭环控制。仿真中包含1.5拍数字延迟补偿。电机为SPMSM。
1.算法电气参数与电机实际参数一致
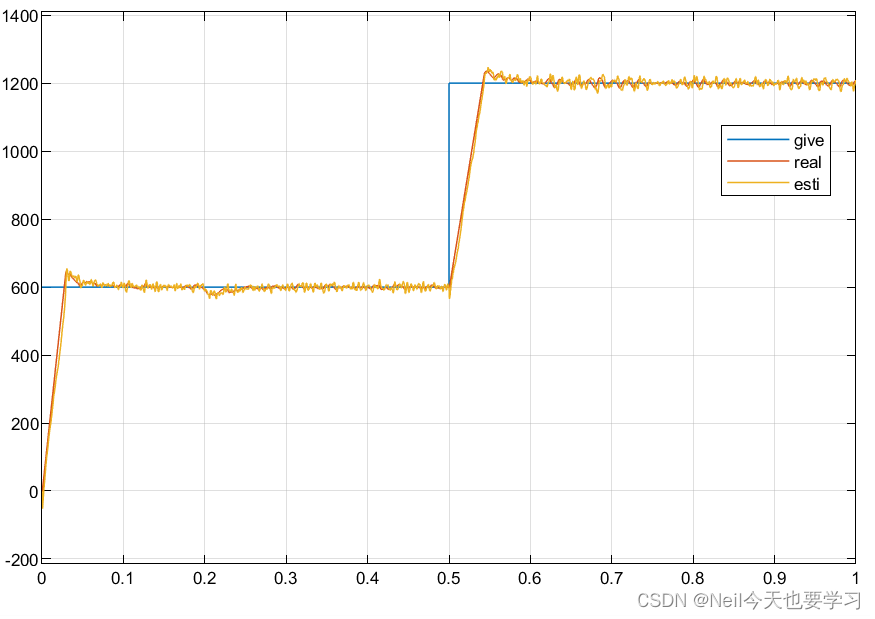
给定转速、实际转速和估计转速波形
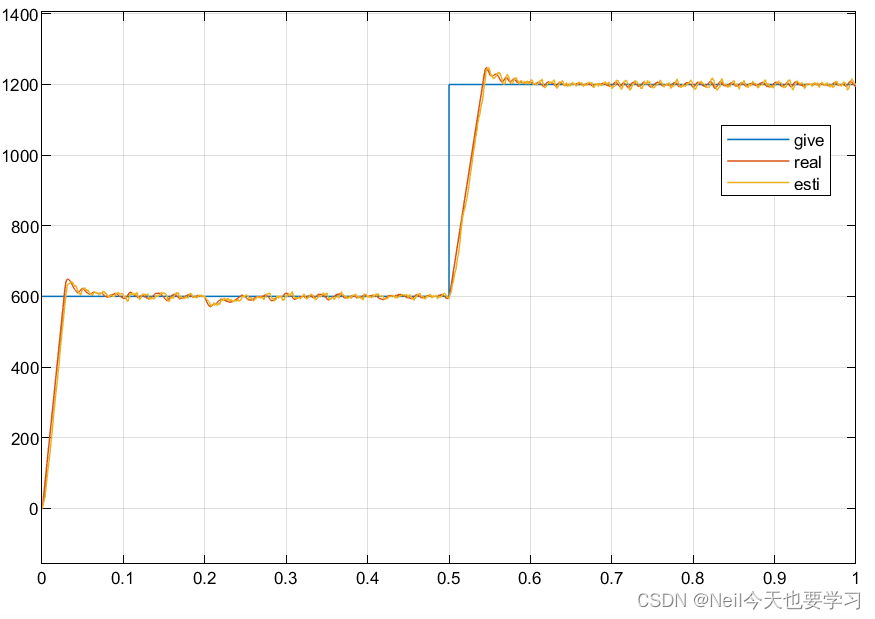
估计转速与实际转速误差波形,稳态过程转速估计误差在±20rpm以内
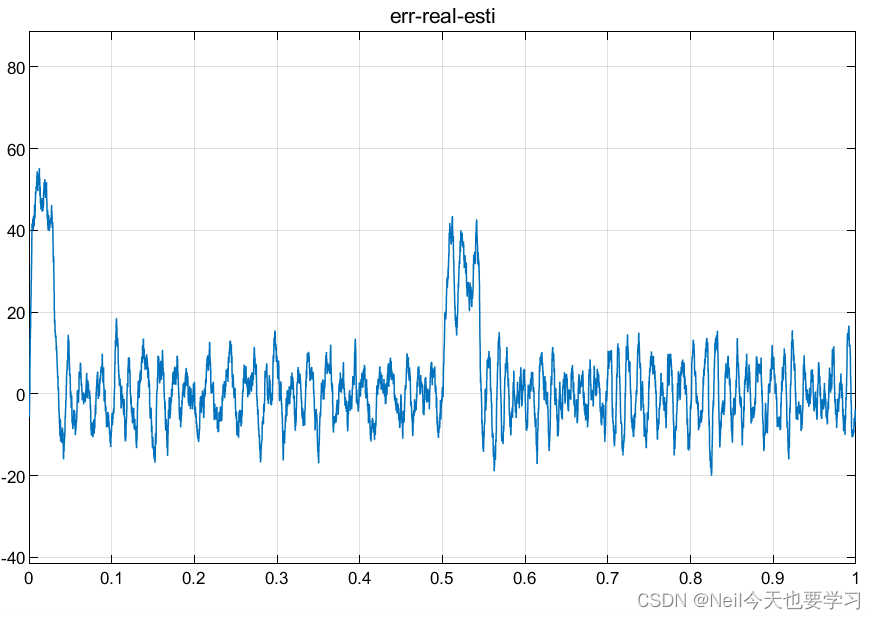
估计转角与实际转角误差波形,稳态过程转速估计误差在-0.02~0.04rad以内

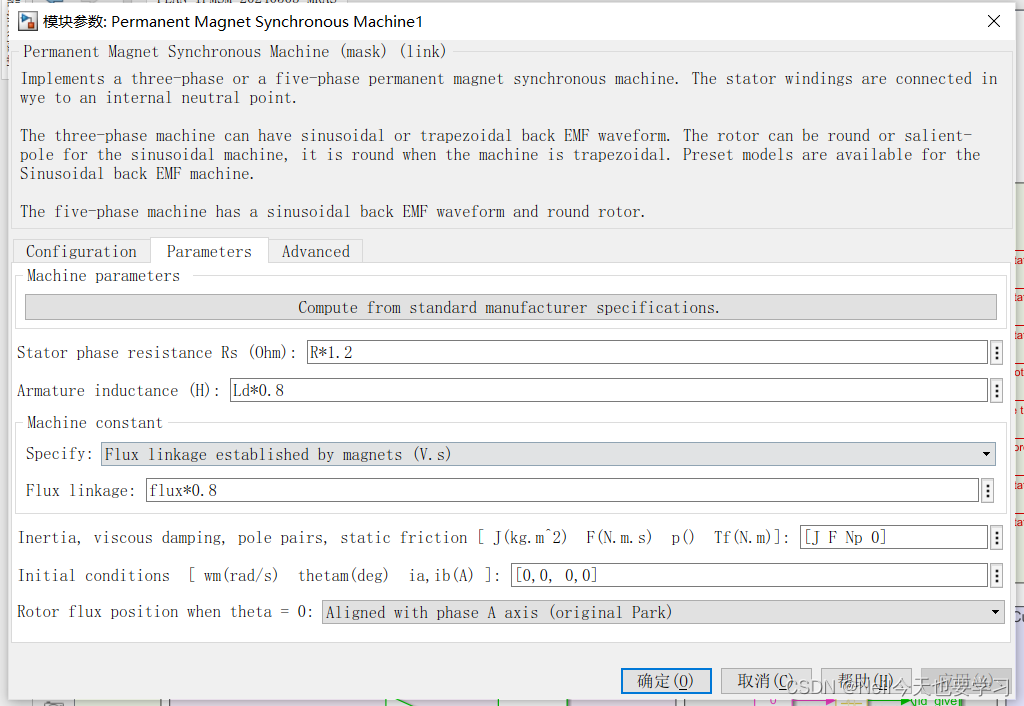
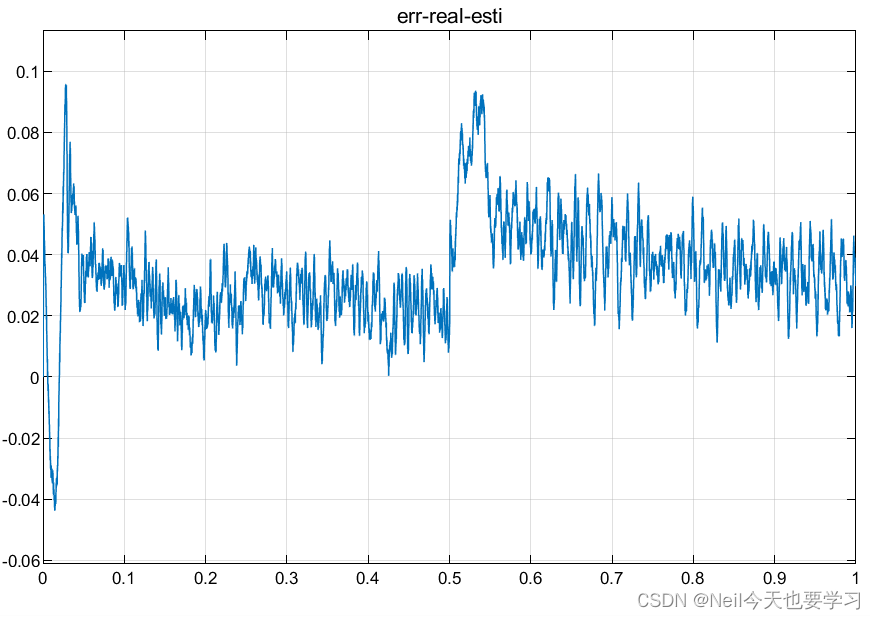
2.电机实际电阻为算法电阻1.2倍(模拟升温电机升高),电机实际电感为算法电感0.8倍(模拟电感饱和),电机实际转子磁链为算法转子磁链0.8倍(模拟电机退磁)。
给定转速、实际转速和估计转速波形,可以看出在电气参数变化幅度较小时,仍能实现电机无感稳定控制
估计转速与实际转速误差波形,启动时转速估计误差变大,稳态时转速波动也会变大
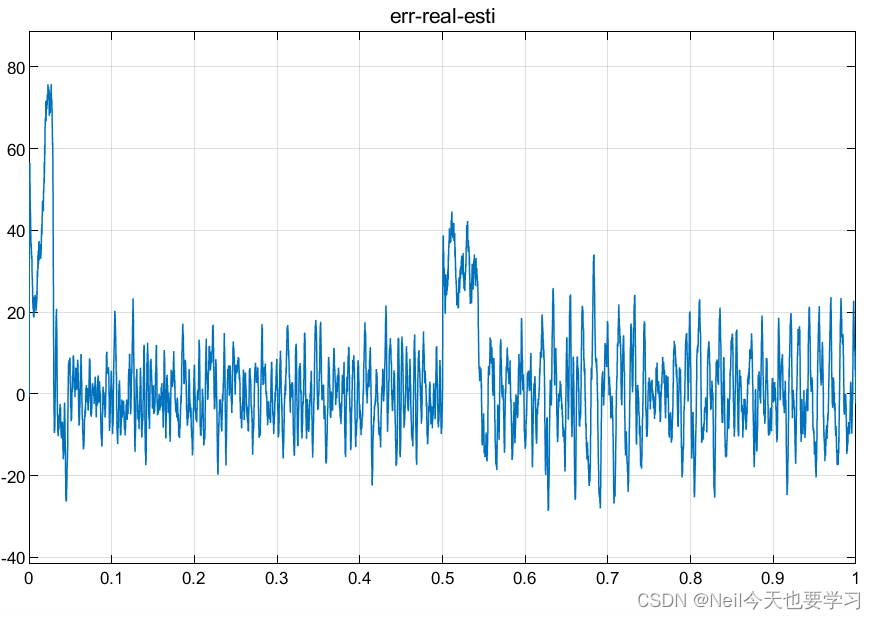
估计转角与实际转角误差波形,从波形可以看出,转角误差明显变大,在启动时最大转角误差达到了0.1rad,有可能导致电机失控
目前,MRAS无速度算法的改进方向主要有:1.选取更合适的MRAS模型; 2.转速估算中实时辨识电机参数;3.选择更合理的自适应律,在提高收敛速度的同时保证系统的参数鲁棒性。















 7061
7061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









