









 本文详细介绍了如何在ROS中将来自Autoware纯_pursuit节点的/twist_raw几何_msgs/TwistStamped消息转换为标准的/cmd_vel geometry_msgs/Twist格式,通过创建vel_transform功能包并实现消息转换函数,确保小车底盘顺利控制。经过测试,该转换在差速底盘上运行稳定。
本文详细介绍了如何在ROS中将来自Autoware纯_pursuit节点的/twist_raw几何_msgs/TwistStamped消息转换为标准的/cmd_vel geometry_msgs/Twist格式,通过创建vel_transform功能包并实现消息转换函数,确保小车底盘顺利控制。经过测试,该转换在差速底盘上运行稳定。
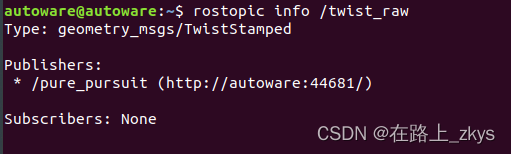
Autoware pure_pursuit节点输出的话题是 "/twist_raw", 需要转换为我们小车底盘控制速度的话题,我这里直接用"/cmd_vel"。主要任务是消息格式的转换,下面详细介绍。
使用 rostopic info 指令查看话题 /twist_raw的消息格式,查看结果为 geometry_msgs/TwistStamped 显然于我们常用的"/cmd_vel" 的消息格式不一样,cmd_vel的消息格式为geometry_msgs/Twist
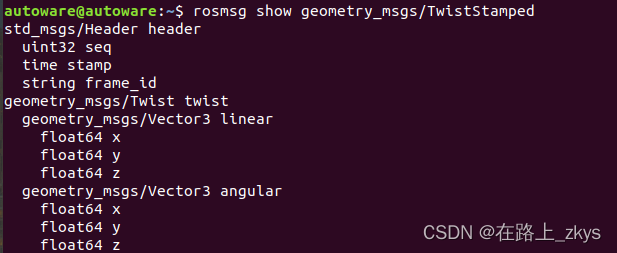
使用 rosmsg show查看geometry_msgs/TwistStamped 消息的具体格式,显示如下:
创建一个功能包转换消息格式,具体如下:
# 创建功能包
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_creat_pkg vel_transform roscpp geometry_msgs std_msgs
// 消息格式转换的源码
#include <ros/ros.h>
#include <std_msgs/Float32.h>
#include <geometry_msgs/TwistStamped.h>
#include <geometry_msgs/Twist.h>
ros::Publisher twist_pub_;
ros::Subscriber twist_sub_;
void twistCmdCallback(const geometry_msgs::TwistStampedConstPtr& msg)
{
geometry_msgs::Twist twist = msg->twist;
twist_pub_.publish(twist);
ROS_INFO("Transform Success !");
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "twist_transform");
ros::NodeHandle nh;
twist_pub_ = nh.advertise<geometry_msgs::Twist>("cmd_vel", 1);
twist_sub_ = nh.subscribe<geometry_msgs::TwistStamped>("twist_raw", 1, twistCmdCallback);
ros::spin();
return 0;
}在cmakelists.txt文件中配置下功能包即可
# 这里我的消息转换源码的文件名为twist_transform.cpp
add_executable(twist_transform src/twist_transform.cpp)
target_link_libraries(twist_transform
${catkin_LIBRARIES}
)经测试,pure pursuit在差速底盘上的运行还算可以。

















 2467
2467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









