









本教程将指导您在Ubuntu操作系统下使用NimServoSDK_V2.0.0来运行CANopen通信的PMM系列一体化伺服电机。我们将介绍必要的步骤和命令,以确保您能够成功地配置和控制PMM系列一体化伺服电机。
NimServoSDK_V2.0.0是一款用于PMM一体化伺服电机的软件开发工具包。它提供了一套API和工具,用于配置、控制PMM一体化伺服电机。本教程将引导您完成在Ubuntu 18.04.2 Desktop AMD64操作系统上安装和使用NimServoSDK_V2.0.0的过程。
NimServoSDK_V2.0.0是一款用于PMM一体化伺服电机的软件开发工具包。它提供了一套API和工具,用于配置、控制PMM一体化伺服电机。本教程将引导您完成在Ubuntu 18.04.2 Desktop AMD64操作系统上安装和使用NimServoSDK_V2.0.0的过程。
01.准备工作
在正式介绍之前还需要一些准备工作:
1.装有linux系统的设备:这里使用虚拟机搭建ubuntu-18.04.2-desktop-amd64,ubuntu是一种带桌面的linux系统
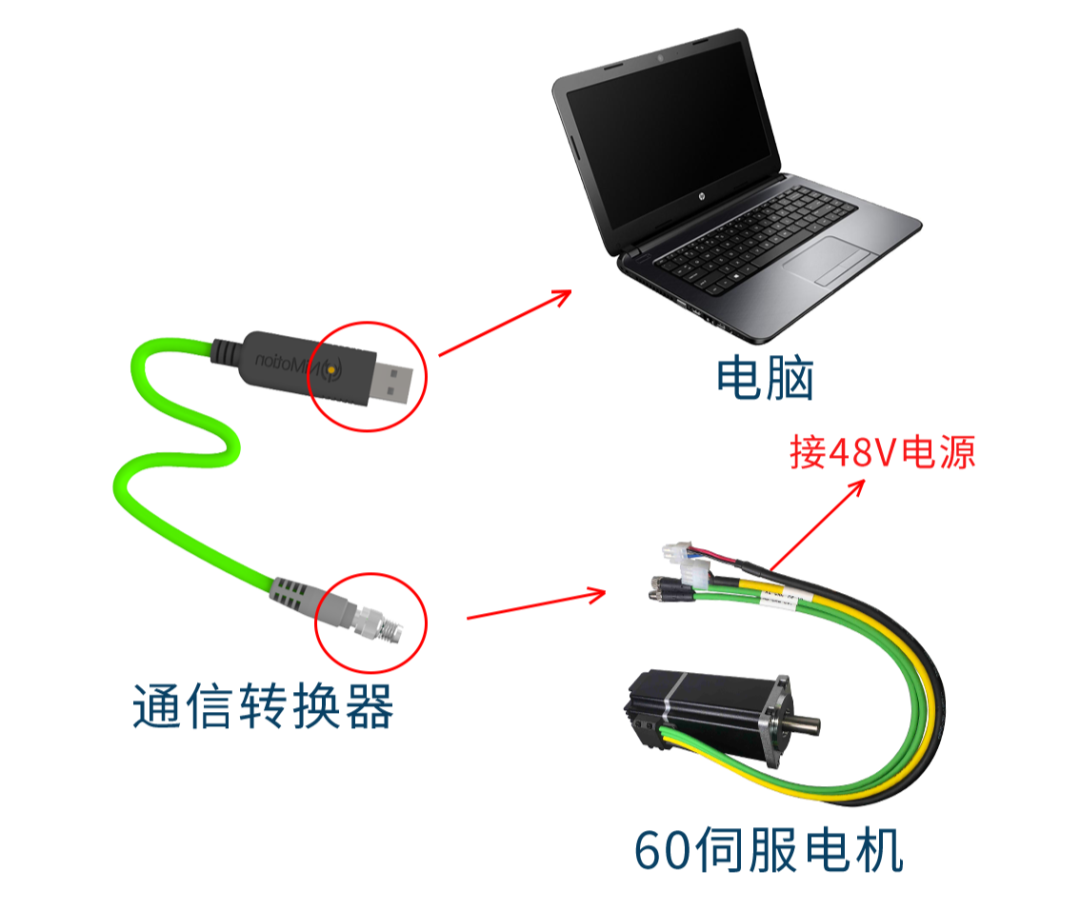
2.USBCAN转换器:NiMotionUSBCAN转换器(一端为USB口,另一端为航插型,用于CAN通信)

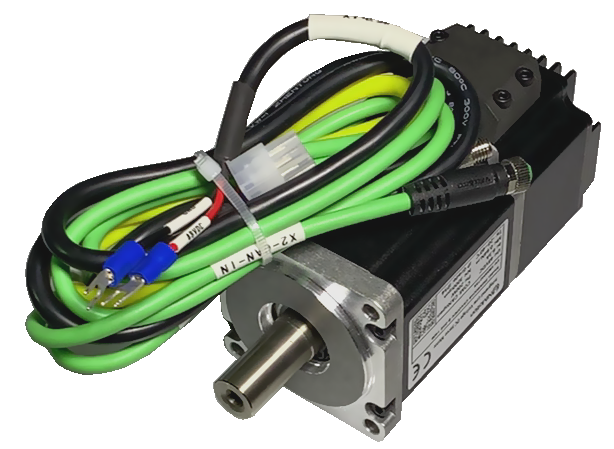
3.PMM6040 CANopen通信一体化伺服电机:
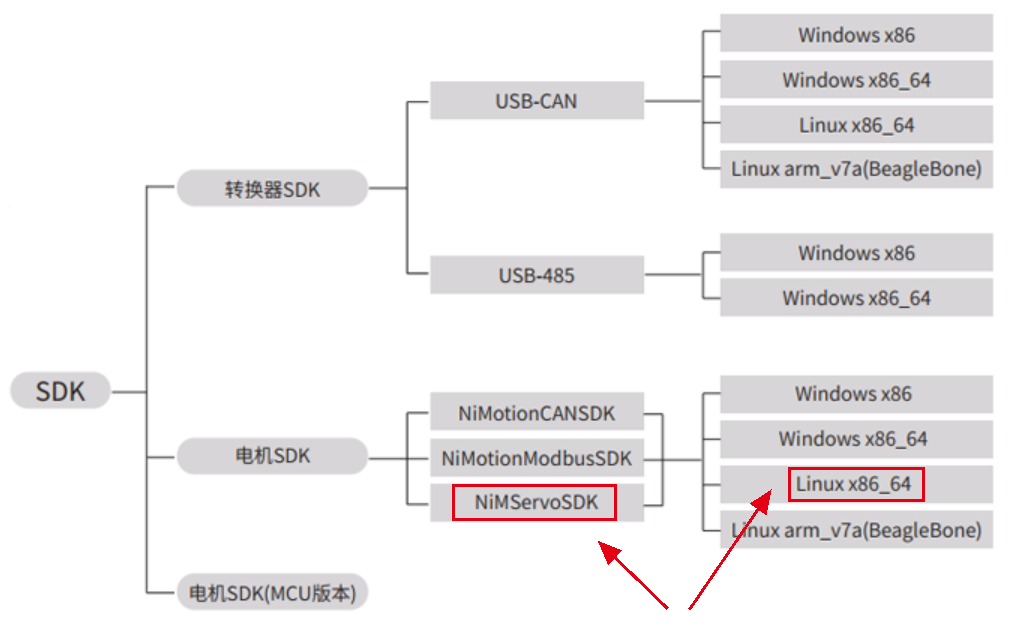
4.SDK文件:Linux x86_64的NiMServoSDK文件包(SDK用于为特定的软件包、软件框架、硬件平台、操作系统等创建应用软件的开发工具的集合,有了它就可以通过调用函数,实现需求功能。了解更多SDK介绍请查看《为了让用户更灵活的使用电机,我们开发了SDK》,相关SDK文件在文末获取或访问官网联系客服获取)
以上准备工作完成后,将USB转CAN转换器两端分别插到电脑USB接口和电机通信口,软件环境搭建请参考《Linux系统下如何使用NiMotionUSBCAN转换器?》
02.操作实例
1.打开系统文件“Files”,右键新建文件夹,命名为“SDK”
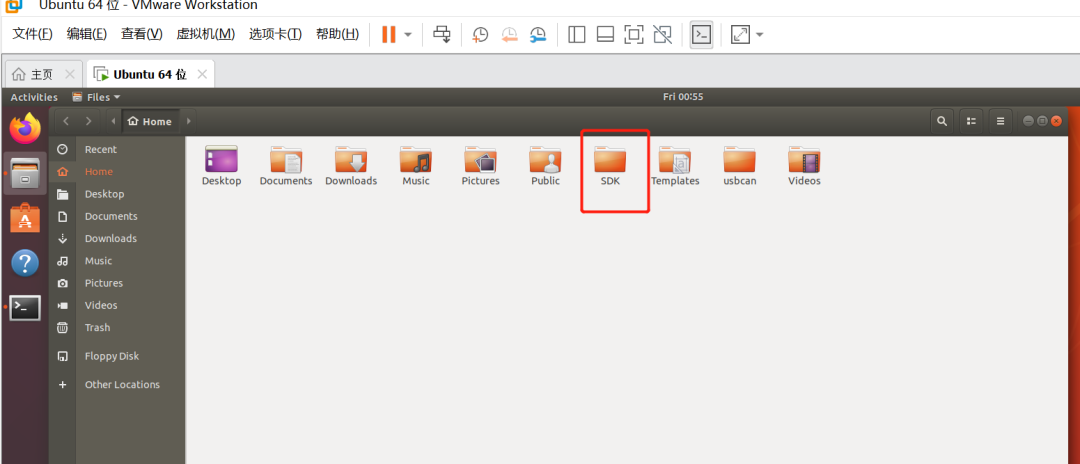
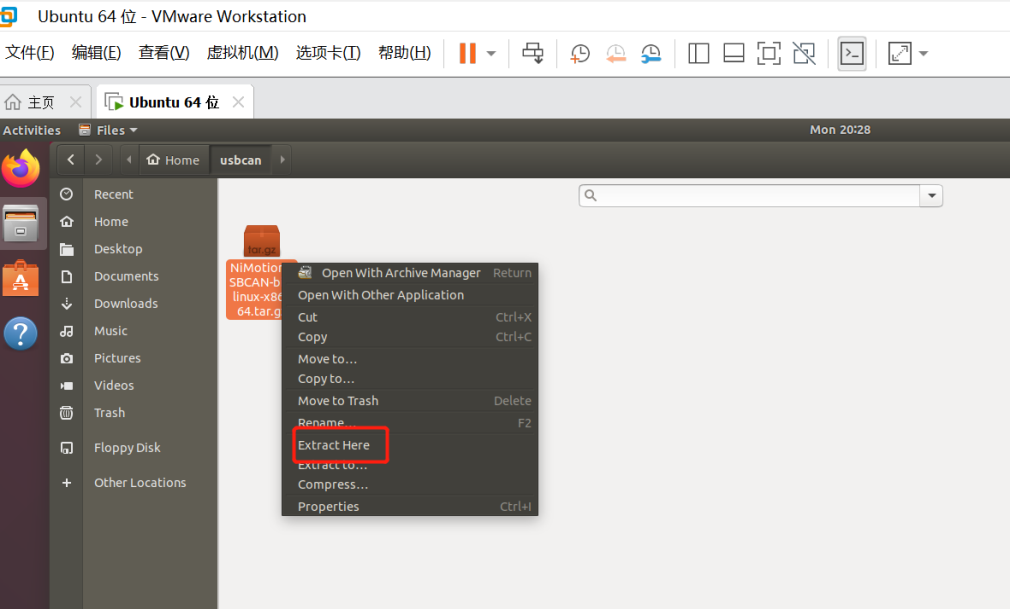
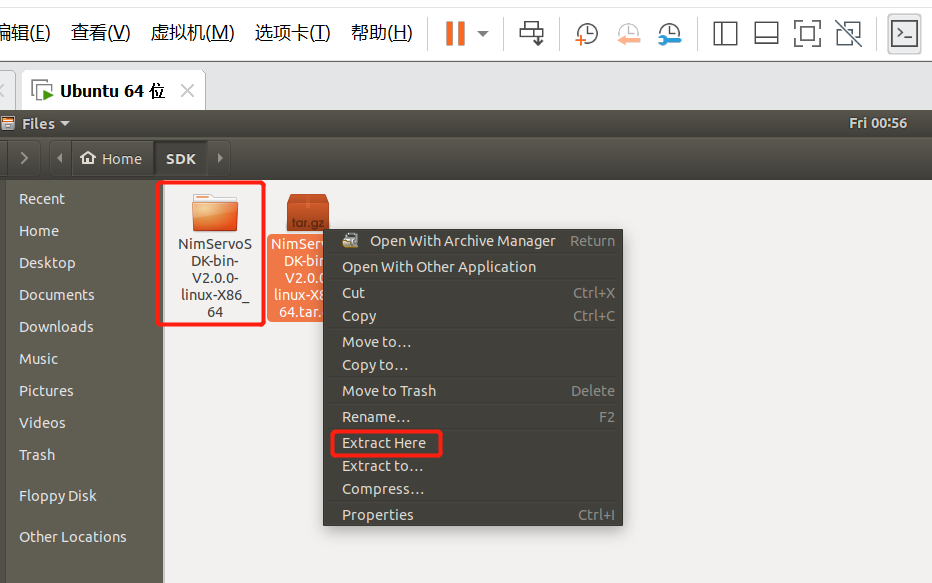
2.将驱动程序文件拷贝到此文件夹下,解压并进入解压目录
3.右键选择“Open in Terminal”(打开终端)
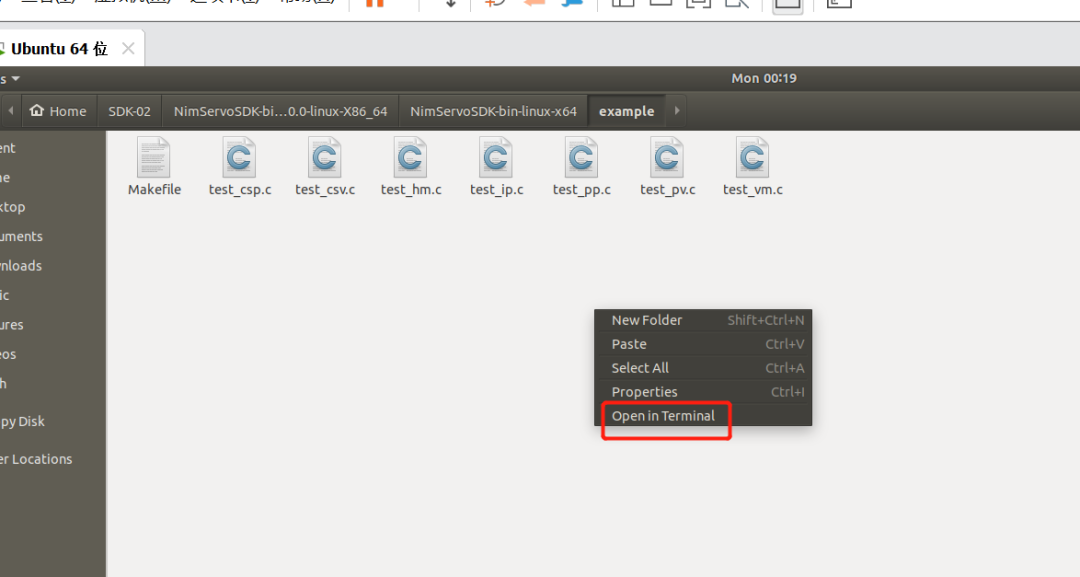
4.在终端窗口执行以下命令:
make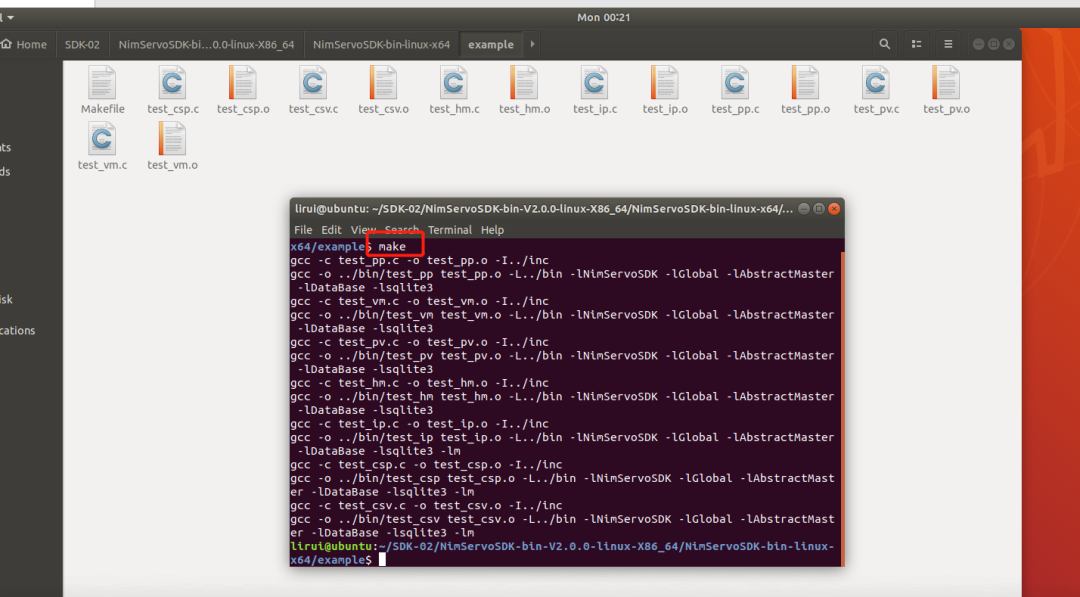
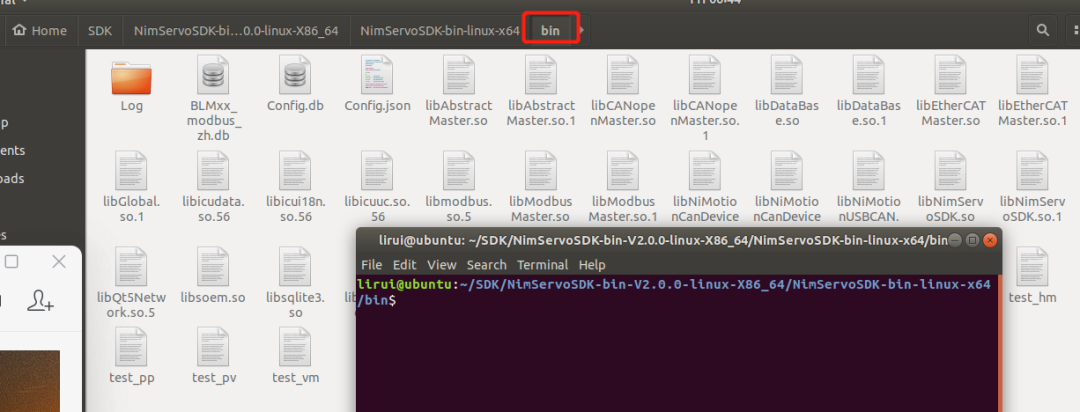
5.进入SDK的bin目录下打开终端。
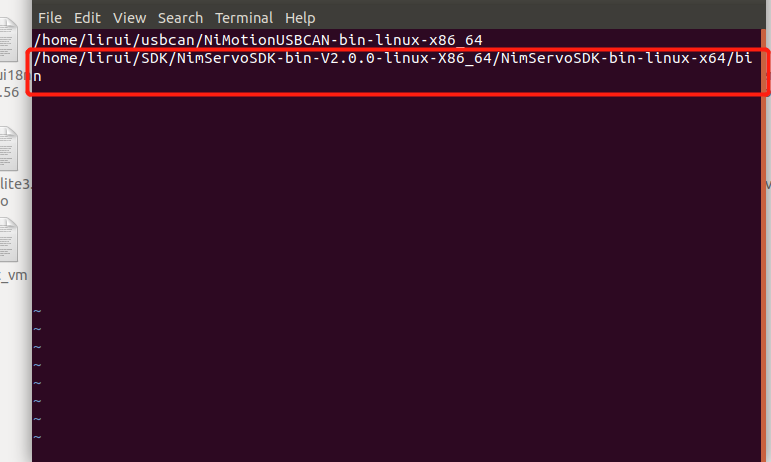
6.配置永久路径
echo $PWDcd /etc/ld.so.conf.d/sudo vi SDK.conf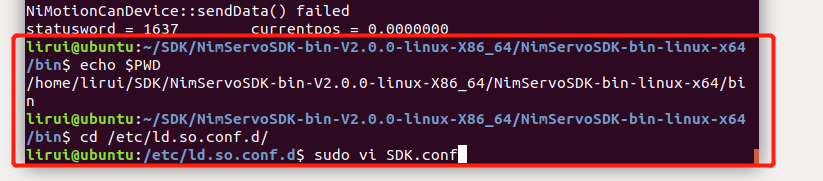
7.运行可执行文件
sudo ldconfig
8.如下图,可执行文件 test_pp后“0”、“1001”、“10000”三个参数分别是“通信协议”、“转换器类型”和“传动比”。
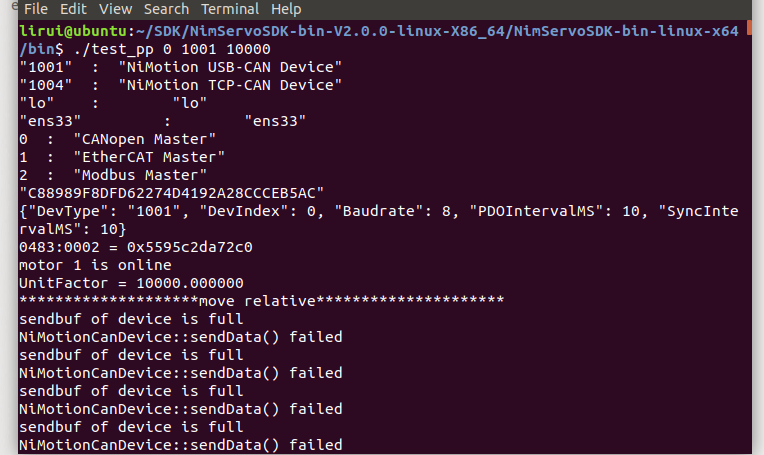
执行此文件后,电机会处于轮廓位置模式,分别进行一次相对位置运动和绝对位置运动。
以上即是今天分享的全部内容,通过本教程,您已经学会了在Ubuntu 18.04.2 Desktop AMD64操作系统上使用NimServoSDK_V2.0.0来运行CANopen通信的PMM伺服电机。您可以根据自己的需求配置和控制PMM伺服电机,并使用示例程序作为起点进行开发。如果您有其他问题,请及时联系我们。
本文参考资料:《PMM系列销售资料包》
下载地址:https://drive.weixin.qq.com/s?k=AGMARQdXAAwYUJwkBl
备用地址:https://wwwe.lanzouq.com/b0fgnf5ni密码:f1x6
˜ 本文章全部内容或部分内容禁止擅自转载、拷贝。
















 352
352











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









