







点云配准的挑战
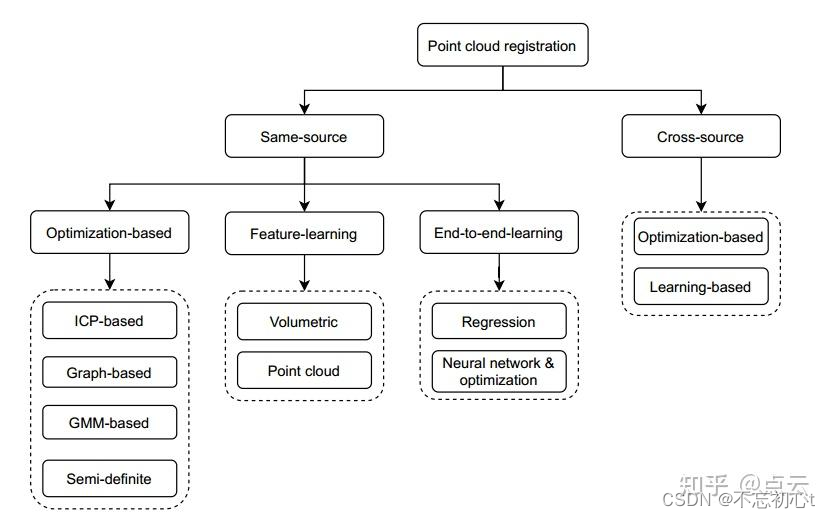
同源点云配准
同源点云的配准是指从同一类型的传感器,但在不同的时间或视角下获取的点云在进行配准问题中存在的挑战,其主要包含了
- 噪声和离群值。在不同的采集时间,环境和传感器噪声是不同的,采集到的点云在同一三维位置附近会包含噪声和异常值。
- 部分重叠。由于视点和采集时间的不同,采集到的点云只是部分重叠。
跨源点云配准
跨源点云配准的挑战,点云传感器经历了快速发展。例如,Kinect已经在许多领域得到了广泛的应用。激光雷达变得使用价格合理,并已集成到移动电话(如iPhone 12)中。而且,多年来三维重建技术的发展使得利用RGB相机生成点云成为可能。尽管在点云采集方面有这些改进,但每个传感器都有其独特的优点和局限性。例如,Kinect可以记录详细的结构信息,但视距有限;Lidar可以记录远处的物体,但分辨率有限。许多证据[77],[41]表明,来自不同传感器的融合点云可为实际应用提供更多的信息和更好的性能。点云融合需要跨源点云配准技术。由于点云是从不同类型的传感器获取的,并且不同类型的传感器包含不同的成像机制,因此点云配准问题中的跨源挑战要比同源点云配准挑战复杂得多。这些挑战主要可以分为
- 噪声和异常值。由于不同采集时间的采集环境、传感器噪声和传感器成像机制不同,采集到的点云在同一个三维位置附近会包含噪声和离群点。
- 部分重叠。由于视点和采集时间的不同,采集到的点云只是部分重叠

 订阅专栏 解锁全文
订阅专栏 解锁全文















 1404
1404











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











