







在 ROS 中的阿克曼模型机器人里,geometry_msgs/Twist 消息通常定义在车辆后桥的中心。这是因为阿克曼转向车辆的运动控制通常围绕后桥中心进行,尤其是速度和角速度的计算。
ROS 中运动学分析为正解(Forward kinematics)和逆解(Inverse Kinematics)两种。
- 正解 或 正运动学模型(forward kinematic model):是将获得的机器人底盘速度指令 /cmd_vel 转化为每个车轮的实际速度。
- 逆解 或 逆运动学模型(inverse kinematic model):是根据电机编码器获得的每个车轮速度计算出机器人底盘速度,从而实现航迹推算
一、两种消息类型的介绍
消息geometry_msgs/Twist 消息类型
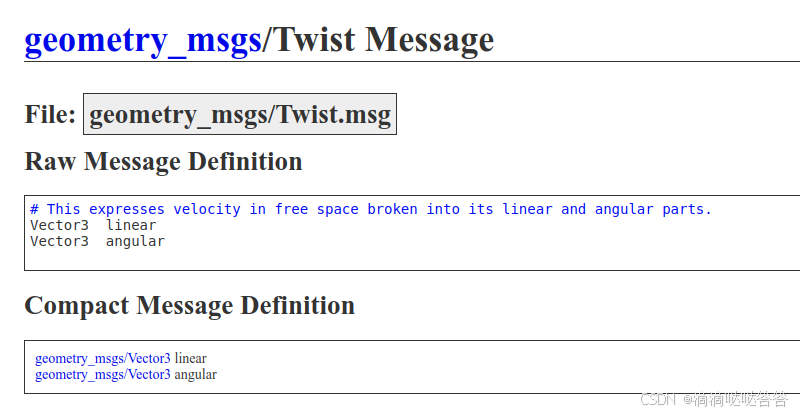
# geometry_msgs/Twist 消息类型
Vector3 linear # 虚拟的中间轮胎的线速度 (m/s)
Vector3 angular # 虚拟的中间轮胎的角速度 (rad/s)ackermann_msgs/AckermannDriveStamped 消息类型
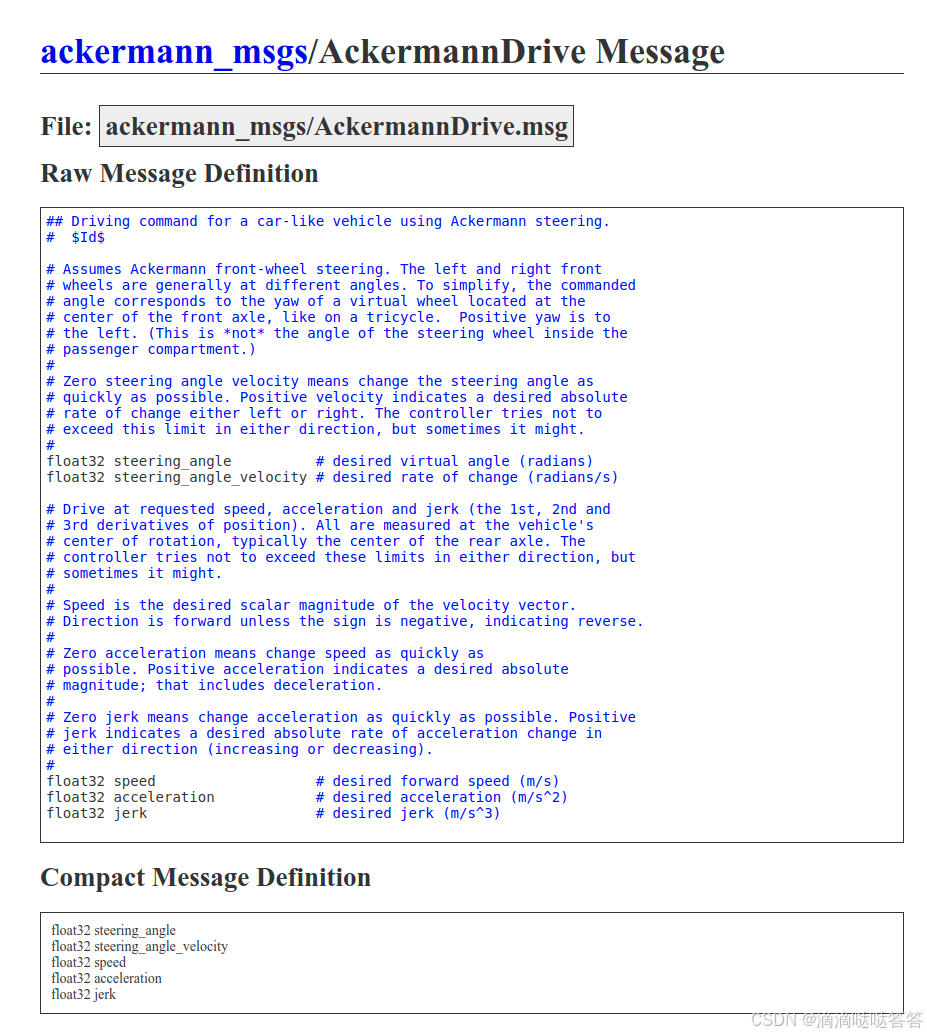
# ackermann_msgs/AckermannDriveStamped 消息类型
# 其中 steering_angle 和 speed 是必需的
float32 steering_angle # 虚拟的中间轮胎的转角 (rad)
float32 steering_angle_velocity # 虚拟的中间轮胎的角速度 (rad/s)
float32 speed # 虚拟的中间轮胎的线速度 (m/s)
float32 acceleration # 虚拟的中间轮胎的加速度 (m/s^2)
float32 jerk # 虚拟的中间轮胎的冲击度 (m/s^3)二、四轮阿克曼正运动学模型
四轮阿克曼模型如下, 为轴距,
为前轮轮距,
为后轮轮距
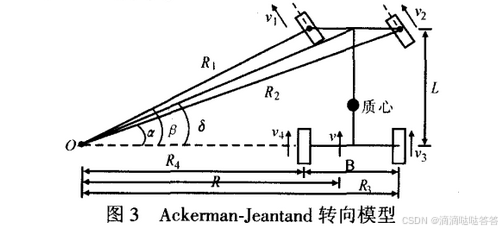
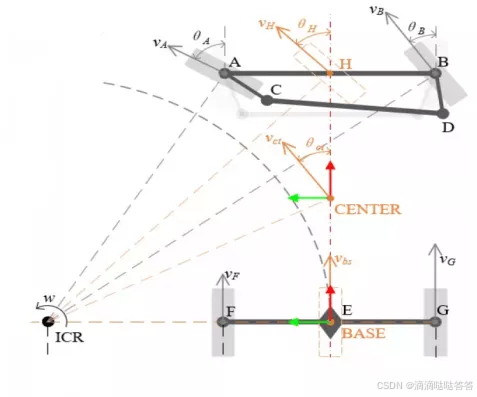
根据上图,定义车辆绕旋转中心 的旋转角速度为
,各轮车速满足:
已知 geometry_msgs/Twist 消息中的 和
,可求得 虚拟的中间轮胎的转向半径
和 前轮转角
,也就是图中的
和
。其中
,
。
四个轮的速度 和 各轮转弯半径
正比,即:
带入得 四个轮的速度 为:
前轮的转角 和
为:
至此,四轮阿克曼模型的 四轮速度 和 两个前轮的转角
均已求出。
三、 两种消息类型的转换
geometry_msgs/Twist -》ackermann_msgs/AckermannDriveStamped
- 根据
计算得到 虚拟的中间轮胎的转向半径
。其中
,
。
- 根据
计算得到 虚拟的中间轮胎的前轮转角
- 将
和 原始的Twist消息中的
分别赋值给 AckermannDriveStamped 消息中的 steering_angle 和 speed。
四、代码
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import rospy
import math
from std_msgs.msg import Bool
from std_msgs.msg import Float32
from std_msgs.msg import Float64
from geometry_msgs.msg import Twist
from ackermann_msgs.msg import AckermannDriveStamped
L = 0.335 # 轴距,单位 m
B_f = 0.305 # 前轮轮距,单位 m
B_r = 0.305 # 后轮轮距,单位 m
max_rad = 0.7 # 最大转弯角度,单位 rad
# 设置最大的角度
def limsteer(data, maxdata):
if data > 0 and data > maxdata:
data = maxdata
elif data < 0 and math.fabs(data) > maxdata:
data = maxdata
return data
# 接受 ackermann_msgs/AckermannDriveStamped 类型的消息 控制 阿克曼小车模型四个轮子的速度和前轮转角
def set_throttle_steer(data):
global L, B_f, B_r, max_rad
pub_vel_left_rear_wheel = rospy.Publisher('/car/left_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_rear_wheel = rospy.Publisher('/car/right_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_left_front_wheel = rospy.Publisher('/car/left_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_front_wheel = rospy.Publisher('/car/right_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_pos_left_steering_hinge = rospy.Publisher('/car/left_steering_hinge_position_controller/command', Float64, queue_size=1)
pub_pos_right_steering_hinge = rospy.Publisher('/car/right_steering_hinge_position_controller/command', Float64, queue_size=1)
v = data.drive.speed # 速度 (m/s)
rad = data.drive.steering_angle # 角度 (rad)
if v != 0 and rad != 0:
# r 为理想的中间轮胎的转弯半径
r = L / math.tan(rad)
w = v / r
# math.copysign(x, y):返回一个与 x 数值大小相同、与 y 符号相同的浮点数
rL_rear = r - (math.copysign(1, w) * (B_r/2.0))
rR_rear = r + (math.copysign(1, w) * (B_r/2.0))
L_front_temp = r - (math.copysign(1, w) * (B_f/2.0))
R_front_temp = r + (math.copysign(1, w) * (B_f/2.0))
rL_front = math.sqrt(math.pow(L_front_temp, 2) + math.pow(L, 2))
rR_front = math.sqrt(math.pow(R_front_temp, 2) + math.pow(L, 2))
# 速度, m/s
vL_rear = v * rL_rear/r
vR_rear = v * rR_rear/r
vL_front = v * rL_front/r
vR_front = v * rR_front/r
# 角度, rad
anL_front = math.atan2(L, L_front_temp) * math.copysign(1, w)
anR_front = math.atan2(L, R_front_temp) * math.copysign(1, w)
else:
# 速度
vL_rear = v
vR_rear = v
vL_front = v
vR_front = v
# 角度
anL_front = rad
anR_front = rad
anL_front = limsteer(anL_front, max_rad)
anR_front = limsteer(anR_front, max_rad)
pub_vel_left_rear_wheel.publish(vL_rear)
pub_vel_right_rear_wheel.publish(vR_rear)
pub_vel_left_front_wheel.publish(vL_front)
pub_vel_right_front_wheel.publish(vR_front)
pub_pos_left_steering_hinge.publish(anL_front)
pub_pos_right_steering_hinge.publish(anR_front)
# 表格形式输出
print(f"{'Wheel/Steering':<25}{'Value':<10}")
print("-" * 35)
print(f"{'Left Front Wheel Velocity : ':<25}{vL_front:.2f} m/s")
print(f"{'Right Front Wheel Velocity: ':<25}{vR_front:.2f} m/s")
print(f"{'Left Rear Wheel Velocity : ' :<25}{vL_rear:.2f} m/s")
print(f"{'Right Rear Wheel Velocity : ':<25}{vR_rear:.2f} m/s")
print(f"{'Left Front Steering Angle : ':<25}{anL_front:.2f} rad")
print(f"{'Right Front Steering Angle: ':<25}{anR_front:.2f} rad")
# 将 geometry_msgs/Twist 类型的消息 转换为 阿克曼小车模型四个轮子的速度和前轮转角
def set_speed(data):
global L, B_f, B_r, max_rad
pub_vel_left_rear_wheel = rospy.Publisher('/car/left_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_rear_wheel = rospy.Publisher('/car/right_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_left_front_wheel = rospy.Publisher('/car/left_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_front_wheel = rospy.Publisher('/car/right_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_pos_left_steering_hinge = rospy.Publisher('/car/left_steering_hinge_position_controller/command', Float64, queue_size=1)
pub_pos_right_steering_hinge = rospy.Publisher('/car/right_steering_hinge_position_controller/command', Float64, queue_size=1)
v = data.linear.x
w = data.angular.z
if v != 0 and w != 0:
# r 为理想的中间轮胎的转弯半径
r = math.fabs(v/w)
# math.copysign(x, y):返回一个与 x 数值大小相同、与 y 符号相同的浮点数
rL_rear = r - (math.copysign(1, w) * (B_r/2.0))
rR_rear = r + (math.copysign(1, w) * (B_r/2.0))
L_front_temp = r - (math.copysign(1, w) * (B_f/2.0))
R_front_temp = r + (math.copysign(1, w) * (B_f/2.0))
rL_front = math.sqrt(math.pow(L_front_temp, 2) + math.pow(L, 2))
rR_front = math.sqrt(math.pow(R_front_temp, 2) + math.pow(L, 2))
# 速度, m/s
vL_rear = v * rL_rear/r
vR_rear = v * rR_rear/r
vL_front = v * rL_front/r
vR_front = v * rR_front/r
# 角度, rad
anL_front = math.atan2(L, L_front_temp) * math.copysign(1, w)
anR_front = math.atan2(L, R_front_temp) * math.copysign(1, w)
else:
# 速度
vL_rear = v
vR_rear = v
vL_front = v
vR_front = v
# 角度
anL_front = w
anR_front = w
anL_front = limsteer(anL_front, max_rad)
anR_front = limsteer(anR_front, max_rad)
pub_vel_left_rear_wheel.publish(vL_rear)
pub_vel_right_rear_wheel.publish(vR_rear)
pub_vel_left_front_wheel.publish(vL_front)
pub_vel_right_front_wheel.publish(vR_front)
pub_pos_left_steering_hinge.publish(anL_front)
pub_pos_right_steering_hinge.publish(anR_front)
# 表格形式输出
print(f"{'Wheel/Steering':<25}{'Value':<10}")
print("-" * 35)
print(f"{'Left Front Wheel Velocity : ':<25}{vL_front:.2f} m/s")
print(f"{'Right Front Wheel Velocity: ':<25}{vR_front:.2f} m/s")
print(f"{'Left Rear Wheel Velocity : ' :<25}{vL_rear:.2f} m/s")
print(f"{'Right Rear Wheel Velocity : ':<25}{vR_rear:.2f} m/s")
print(f"{'Left Front Steering Angle : ':<25}{anL_front:.2f} rad")
print(f"{'Right Front Steering Angle: ':<25}{anR_front:.2f} rad")
def servo_commands():
rospy.init_node('servo_commands', anonymous=True)
# rospy.Subscriber("/ackermann_cmd", AckermannDriveStamped, set_throttle_steer)
rospy.Subscriber("/cmd_vel", Twist, set_speed)
rospy.spin()
if __name__ == '__main__':
try:
servo_commands()
except rospy.ROSInterruptException:
pass
调试代码时,可以通过终端命令直接向话题中发布消息,便于调试:
# 以 10hz 的频率持续向话题发送消息
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.0]'
# 只向话题发布一帧消息,然后停止
rostopic pub /cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.0]' -1Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.0]' 测试结果:
Wheel/Steering Value
-----------------------------------
Left Front Wheel Velocity : 0.91 m/s
Right Front Wheel Velocity: 1.20 m/s
Left Rear Wheel Velocity : 0.85 m/s
Right Rear Wheel Velocity : 1.15 m/s
Left Front Steering Angle : 0.38 rad
Right Front Steering Angle: 0.28 rad参考
ROS综合学习记录(一)---cmd_vel转换为阿克曼模型的速度变换
局部路径规划器teb_local_planner详解5:关于 robots models
08_control_direction_and_speed/scripts/cmdvel2gazebo.py

















 2768
2768

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









