




加速度计的主要参数包括量程、分辨率、灵敏度、输出数据速率、接口类型、功耗、噪声等。量程决定了加速度的测量范围,比如±2g到±16g,不同的应用需要不同的量程。分辨率关系到能检测到的最小变化,通常用位数表示,比如12位或16位。灵敏度则是每g对应的输出值,比如LSB/g。输出数据速率是采样频率,影响响应速度和功耗。接口类型如I2C、SPI,影响如何与主控连接。功耗对于移动设备很重要,噪声和温度范围也是关键参数。
一、加速度计芯片的主要参数
1、量程(Measurement Range)
定义加速度的测量范围(如 ±2g、±4g、±8g、±16g)。
量程越大,可检测的加速度范围越广,但分辨率可能降低。
2、分辨率(Resolution)
数字输出的位数(如 8位、10位、12位、14位),决定最小可检测的加速度变化(例如 12位分辨率对应约 4mg/LSB)。
3、灵敏度(Sensitivity)
每单位加速度对应的输出值(例如 1024 LSB/g)。
4、输出数据速率(Output Data Rate, ODR)
采样频率(如 10Hz、100Hz、1kHz),影响响应速度和功耗。
5、接口类型(Interface)
通信协议(如 I²C、SPI、UART),决定与主控芯片的连接方式。
6、功耗(Power Consumption)
工作电流和待机电流,对低功耗应用(如穿戴设备)尤为重要。
7、噪声(Noise Density)
加速度计的噪声水平(如 100 µg/√Hz),影响测量精度。
8、温度范围(Operating Temperature)
芯片的工作温度范围(如 -40°C 至 +85°C)。
9、内置功能
是否支持自由落体检测、点击/双击识别、运动唤醒等高级功能。
二、加速度计的噪声
噪声通常指的是传感器输出中的随机波动,加速度计的噪声是衡量其输出信号中随机波动的关键指标,直接影响测量精度。确认噪声的方法通常包括以下步骤:
1、通过数据手册参数确认
噪声密度(Noise Density)
单位:通常以 µg/√Hz 或 mg/√Hz 表示。
含义:表示在单位带宽(1Hz)内的噪声强度。
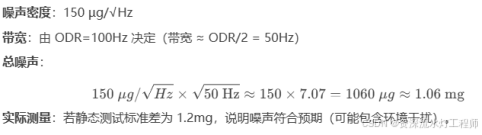
示例:某加速度计噪声密度为 100 µg/√Hz,若带宽为 100Hz,则总噪声为:
![]()
总噪声(Total Noise)
数据手册可能直接给出特定带宽下的总噪声(如 ±2mg RMS)。
与带宽的关系:噪声随带宽的平方根增加(噪声功率与带宽成正比)。
噪声类型
白噪声:均匀分布在所有频率的噪声(常见于数字传感器)。
1/f 噪声(粉红噪声):低频段噪声更强(常见于模拟传感器)。
2、实际测量方法
静态测试法
1、将加速度计固定在无振动的环境中(如桌面)。
2、以高采样率(至少高于目标带宽)采集一段时间(如 10 秒)的原始数据。
3、计算输出的标准差(Standard Deviation),即 RMS(均方根)噪声。
3、噪声与芯片性能的关系
噪声随带宽增加而增大,可通过降低输出数据速率(ODR)或添加低通滤波器减少噪声。
三、加速度计的带宽
既然说到了带宽,那就要解释一下什么是带宽。带宽在电子设备中通常指信号能够通过的频率范围,但加速度计的带宽具体指什么呢?可能需要联系到传感器能够有效测量的最高频率。比如,如果加速度计的带宽是100Hz,意味着它能准确测量频率在0到100Hz之间的振动或加速度变化,超过这个频率的信号可能会被衰减或无法检测。高带宽的加速度计适合测量快速变化的振动,如机械冲击或高频机械振动,而低带宽的可能更适合静态或缓慢变化的加速度测量,比如倾角检测。
1、带宽的定义
物理意义
带宽表示加速度计能够有效测量的频率上限。例如:带宽为 100Hz:可测量频率在 0Hz(直流)到 100Hz 之间的振动信号。频率超过 100Hz 的信号会被显著衰减,导致测量失真。
-3dB 点
在频响曲线中,-3dB 对应信号功率衰减为原始值的 50%(幅度衰减为 70.7%)。
带宽通常以 -3dB 截止频率(fcfc)标定。
2、带宽的影响因素
传感器内部低通滤波器
加速度计通常内置低通滤波器(Anti-Aliasing Filter),用于限制带宽,避免高频噪声混叠到有效信号中。
滤波器截止频率直接决定带宽。
输出数据速率(ODR)
ODR(采样率)需满足奈奎斯特采样定理:ODR≥2×fcODR≥2×fc。
若 ODR=200Hz,则理论最大带宽为100Hz。
机械结构响应
MEMS 加速度计的机械谐振频率远高于带宽(如 5kHz),但实际可用带宽由电路和滤波器限制。
3、带宽与性能的关系
高频信号检测
高带宽(如 1kHz):适合捕捉快速变化的振动(如冲击、机械故障监测)。
低带宽(如 10Hz):适合静态或慢速运动(如倾角检测、计步器)。
噪声与带宽的权衡

功耗
高带宽需要更高的 ODR 和更快的信号处理,可能增加功耗(对电池供电设备需优化)。
4、实际应用场景
工业振动监测
需检测高频机械振动(如轴承故障频率 1kHz),选择带宽 ≥1kHz 的加速度计。
消费电子(手机、手环)
检测人体运动(步频通常 <10Hz),带宽设为 20Hz 即可,兼顾低噪声和低功耗。
汽车安全(碰撞检测)
需快速响应冲击信号(微秒级),带宽需高达 2kHz 以上。
5、带宽测试方法
频率响应测试
使用振动台输入正弦扫频信号(如 10Hz–1kHz),测量输出幅度衰减至 -3dB 的频率点。
阶跃响应测试
输入阶跃加速度信号,通过上升时间估算带宽:
四、加速度计的灵敏度详解
1、灵敏度的定义
灵敏度(Sensitivity) 是指加速度计输出信号与输入加速度之间的比例关系,即 单位加速度变化引起的输出变化量。其具体表达形式取决于加速度计的类型(模拟或数字输出):
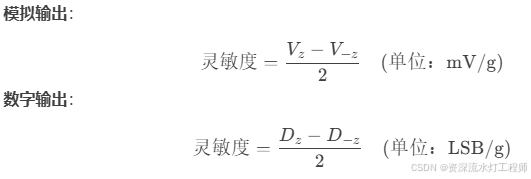
模拟输出加速度计
单位:通常为 mV/g(毫伏每重力加速度)。
示例:灵敏度为 300 mV/g 表示每 1g 的加速度变化会产生 300mV 的电压输出变化。
数字输出加速度计
单位:通常为 LSB/g(最低有效位每重力加速度)。
示例:灵敏度为 1024 LSB/g 表示每 1g 的加速度变化会对应数字输出值变化 1024 个最小单位。
2、灵敏度的意义
灵敏度是加速度计的核心性能指标,直接影响测量精度和应用场景的选择:
检测微小加速度的能力
高灵敏度:可检测微小振动或低速运动(如地震监测、生物运动分析)。
低灵敏度:适合测量大范围加速度(如汽车碰撞检测、工业振动)。
信噪比(SNR)的影响
灵敏度越高,相同加速度下的信号幅度越大,但若噪声水平不变,信噪比会提高。
示例:灵敏度 1000 LSB/g 的加速度计在 0.1g 加速度下输出 100 LSB,若噪声为 5 LSB,则 SNR=20;若灵敏度为 500 LSB/g,同样条件下 SNR=10。
量程与灵敏度的权衡
量程(Measurement Range)与灵敏度成反比。例如:
±2g 量程的加速度计灵敏度可能为 1024 LSB/g。
±16g 量程的灵敏度可能降至 128 LSB/g。
高量程牺牲灵敏度,但可避免输出饱和(如剧烈冲击场景)。
3、灵敏度的测量方法
测量灵敏度需使用已知加速度输入并记录输出信号,常用方法是静态重力场测试法
原理:利用地球重力场(1g)作为基准输入,通过改变加速度计方向测量输出。
步骤:
1、水平校准:
将加速度计平放,使 Z 轴与重力方向垂直(理想输出:X=0g,Y=0g,Z=1g)。
记录 Z 轴输出值 Vz(或数字值 Dz)。
2、反转测试:
将加速度计倒置(Z 轴指向地面),此时 Z 轴承受 -1g。
记录输出值 V−z。
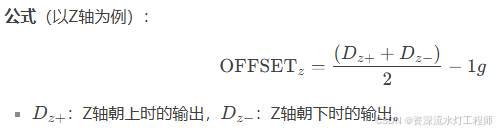
3、计算灵敏度:
4、灵敏度误差的来源与校准
误差来源
温度漂移:灵敏度随温度变化(数据手册通常提供温度系数,如 ±0.01%/°C)。
非线性误差:输出与加速度的非线性关系(尤其在量程边缘)。
安装偏差:传感器与测试方向未对齐。
校准方法
多点校准:在不同加速度下(如 0g、1g、-1g)测量输出,拟合灵敏度曲线。
温度补偿:根据温度传感器数据修正灵敏度(需芯片支持温度补偿寄存器)。
5、实际应用中的选择建议
高精度场景(如惯性导航、精密仪器):
选择高灵敏度(如 1024 LSB/g)且低噪声的加速度计(如 ADXL355)。
定期校准以补偿温度漂移。
高动态范围场景(如无人机、碰撞检测):
选择低灵敏度(如 128 LSB/g)但大量程(±16g)的型号(如 MPU6050)。
确保灵敏度与量程匹配,避免信号饱和。
消费电子(如手机、手环):
平衡灵敏度与功耗,通常选择 500–1000 LSB/g 的中等灵敏度加速度计(如 LIS3DH)。
加速度计的 OFFSET值(偏移值)是指当加速度计处于静止状态或零加速度输入时,其输出信号的非零偏差值。这一参数反映了传感器的固有误差,可能由制造工艺、温度变化、安装偏差或长期使用导致的老化等因素引起。以下是其详细含义及影响:
五、加速度计的偏移值(OFFSET)
加速度计的 偏移值是指当加速度计处于静止状态或零加速度输入时,其输出信号的非零偏差值。这一参数反映了传感器的固有误差,可能由制造工艺、温度变化、安装偏差或长期使用导致的老化等因素引起。
1、偏移值的分类
静态偏移
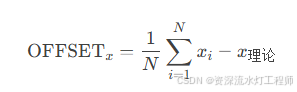
当加速度计静止且无外部加速度作用时,各轴(X/Y/Z)的输出应理想上为零(或在重力场中仅重力方向有1g输出)。
OFFSET值即为此时实际输出与理论值的偏差。
示例:
平放时,Z轴理论输出为+1g(重力方向),实际输出为+1.05g → Z轴OFFSET=+0.05g。
X轴理论输出为0g,实际输出为-0.02g → X轴OFFSET=-0.02g。
动态偏移
在运动过程中,OFFSET可能因温度变化或机械应力发生漂移,导致输出信号整体偏离真实值。
2、偏移值的来源
制造工艺误差
MEMS传感器的微结构不对称或电路板焊接偏差导致初始偏移。
温度影响
温度变化导致材料膨胀/收缩或电路参数变化,引起OFFSET漂移(数据手册通常标注温度系数,如 ±0.1mg/°C)。
长期稳定性
传感器老化或机械疲劳导致OFFSET随时间缓慢变化。
安装倾斜
传感器未严格水平安装,导致重力分量在各轴上的投影误差(如X轴倾斜5°,引入OFFSET≈sin(5°)=0.087g)。
3、偏移值的影响
静态测量误差
在倾角检测、姿态估计等应用中,OFFSET会导致角度计算偏差。
示例:若X轴OFFSET=0.1g,静止时误判为倾斜角≈5.7°(arctan(0.1g/1g))。
动态信号失真
振动或运动信号叠加OFFSET,影响峰值检测和频率分析。
系统累积误差
在惯性导航中,未校准的OFFSET会通过积分放大,导致位置和速度估计严重偏离。
4、如何校准OFFSET值
静态校准法
步骤:
将加速度计静止放置在已知方向(如水平面)。
采集各轴输出数据(建议多次采样取平均)。
计算OFFSET并写入校准寄存器(若有)或在软件中补偿。
动态校准法(多位置法)
步骤:
将加速度计依次放置在不同方向(如正面、反面、侧面)。
利用重力分量的对称性解算各轴OFFSET。

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









