





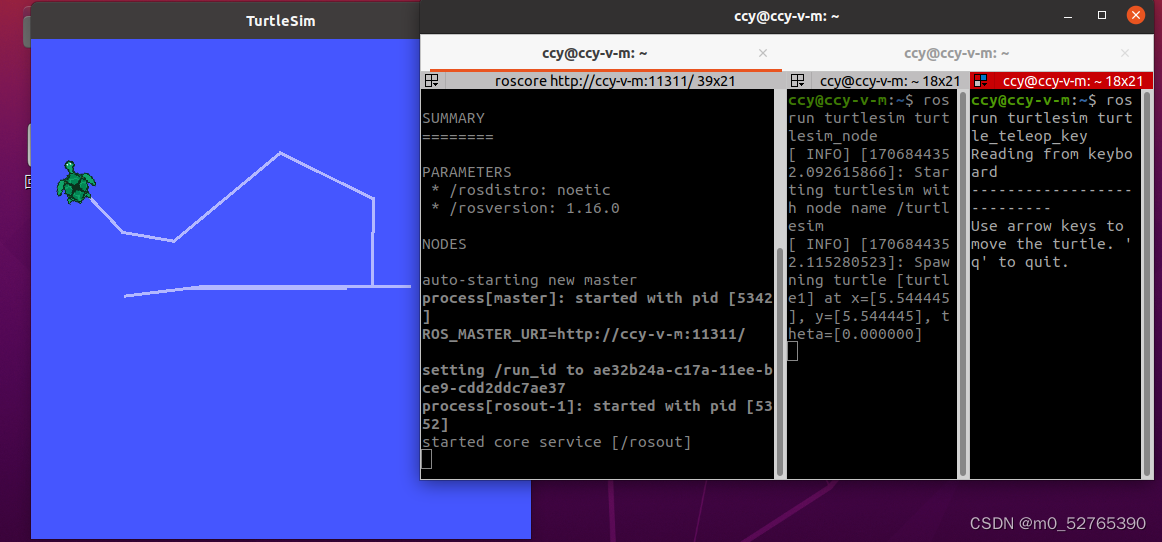
使用“CTRL + ALT + T”,打开三个terminal,依次输入以下三个命令:
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key运行上述三个命令后,就可以实现控制单个turtle运动。

使用“CTRL + ALT + T”,打开三个terminal,依次输入以下三个命令:
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key运行上述三个命令后,就可以实现控制单个turtle运动。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




















 3264
3264







