






 本文详细介绍了如何在Ubuntu20.04系统上安装RealSenseD435i相机驱动,使用RealsenseSDK,并配合Rtabmap进行3D环境建图,包括源代码安装、修改launch文件和运行过程。
本文详细介绍了如何在Ubuntu20.04系统上安装RealSenseD435i相机驱动,使用RealsenseSDK,并配合Rtabmap进行3D环境建图,包括源代码安装、修改launch文件和运行过程。
一、硬件
相机:RealSense D435i
工控机: 幻影峡谷NUC 11代i7
系统:ubuntu 20.04 内核
ROS: neotic
二、安装Realsense SDK
SDK 安装在另一篇文章中说明了。链接为:ubuntu中使用Realsense相机建图,结果显示在RealSense Viewer-CSDN博客
三 、Rtab安装
1、源码安装rtabmap
git clone https://github.com/introlab/rtabmap.git rtabmap
cd rtabmap/build
cmake -DCMAKE_INSTALL_PREFIX=~/catkin_ws/devel ..
make -j8
make install
2、源码安装rtabmap_ros
cd ~/catkin_ws
git clone https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros
catkin_make -j8
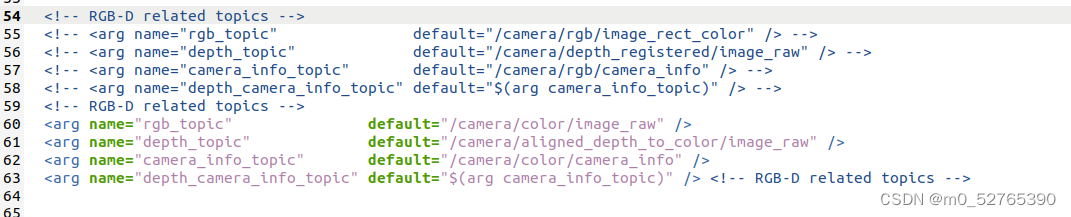
3、修改launch文件
修改catkin_ws/src/rtabmap_ros/rtabmap_ros/launch中的rtabmap.launch
<!-- RGB-D related topics -->
<arg name="rgb_topic" default="/camera/color/image_raw" />
<arg name="depth_topic" default="/camera/aligned_depth_to_color/image_raw" />
<arg name="camera_info_topic" default="/camera/color/camera_info" />
<arg name="depth_camera_info_topic" default="$(arg camera_info_topic)" /> <!-- RGB-D related topics -->
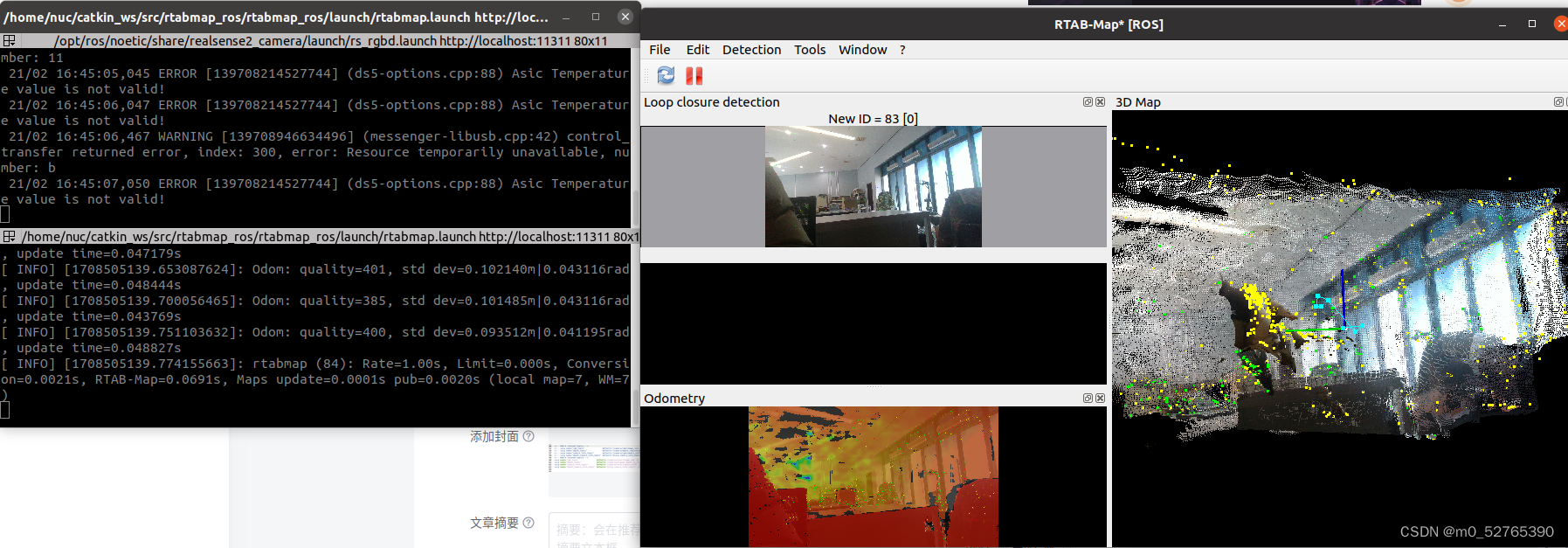
4、运行
roslaunch realsense2_camera rs_rgbd.launch
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start"
5、运行结果



















 2343
2343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











