






一、基本原理
毫米波雷达通过天线发射调频连续波(FMCW),利用反射回波与发射波的时间差可计算出目标距离。此外,毫米波雷达可也基于多普勒原理,通过发射与反射信号的频率差异可以精确测量目标相对于雷达的运动速度,进一步通过多目标检测与跟踪算法实现多目标分离与跟踪。
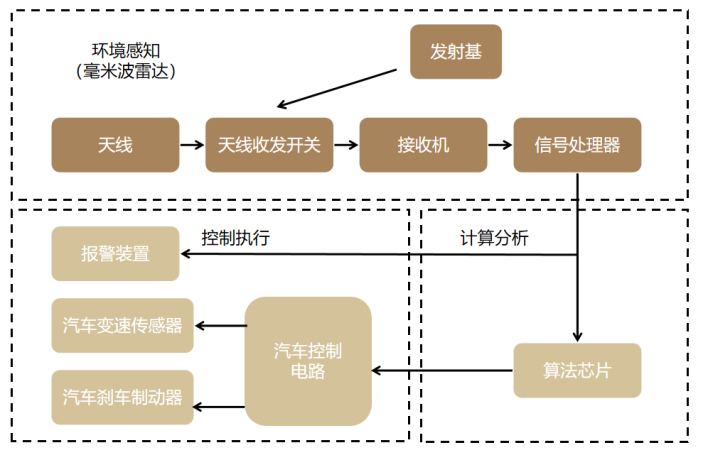
车载毫米波雷达工作原理

多普勒效应示意图
1.1 距离测量
毫米波雷达距离测量的基本原理是,计算发射电磁波与接收反射电磁波之间的时间差,并通过电磁波传播速度估算目标物体距离,如下图所示为FMCW (Frequency Modulated Continuous Wave)雷达主射频组件的简化框图。主要工作流程为:
①通过合成器生成线性调频脉冲;
②将线性调频脉冲通过发射天线发射出去;
③通过接收天线接收反射的电磁波;
④通过混频器将发射信号和接收信号合并到一起,生成中频(IF)信号,并通过IF信号计算时间差。
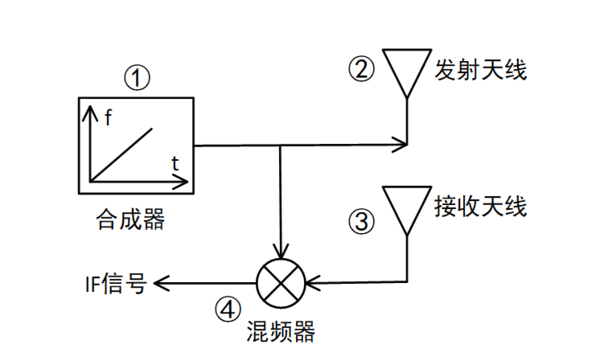
FMCW雷达框图
混频器是一个电子组件能够将两个信号合并在一起并生成新的频率的信号,生成的新频率等于两个输入正弦信号频率差,相位差等于两个输入信号的相位差。图2所示为毫米波雷达经过以上流程后检测单个物体获取的IF信号。当电磁波经过路径有多个障碍物时,接收天线会接收到多个反射信号,生成多个信号频率固定的IF单音信号,通过傅里叶变换即可分离IF信号中不同单音,因此毫米波雷达能够同时检测多个目标物体的距离。
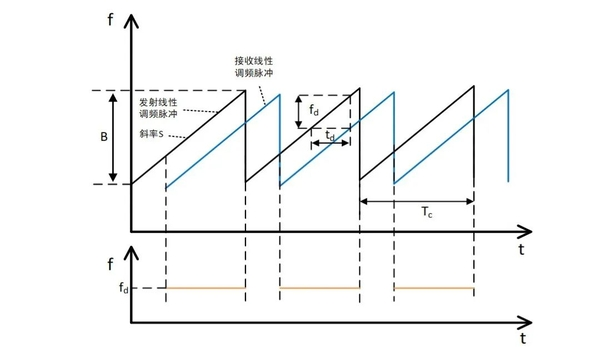
毫米波雷达检测单个物体
1.2 速度测量
FMCW毫米波雷达会发射两个间隔为的线性调频脉冲用于测速,如下图所示。每个反射的线性调频脉冲通过FFT处理后,可获取到物体的距离信息(距离FFT)。每个线性调频脉冲的距离FFT会在同一位置出现峰值相同,相位不同。测得相位差对应于速度为物体的移动。当有多个具有不同速度的物体在同一距离时,双线性调频脉冲速度测量方法将不起作用,需要发送N个线性调频脉冲并通过多普勒FFT可以计算出相同距离多个物体的速度。
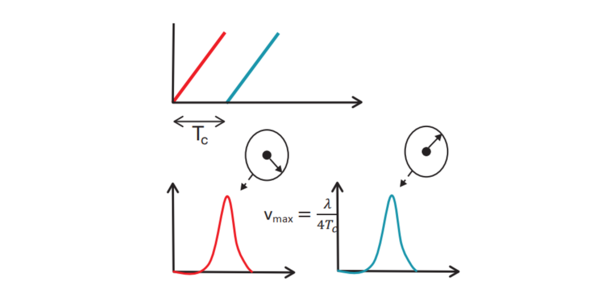
双线性调频脉冲速度测量
1.3 角度检测
FMCW毫米波雷达至少需要两个接收天线才能测出目标物体角度信息。下图为毫米雷达角度检测原理,目标到天线的差分距离很小的变化就会导致距离FFT或多普勒FFT峰值相位的变化,该结果可被用于执行角度估算,进行角度估算至少需要两个天线。

FMCW毫米波雷达角度估算

角度准确度估计
二、毫米波雷达硬件结构
- 射频前端 MMIC 包括发射机、接收机及信号处理器,发射机用于生成射频信号,接收机用于将射频信号转换成低频信号,信号处理器负责在低频信号中提取距离、速度、方位等信息。
- 信号处理芯片方面,分别有以 TI 为代表的 DSP 路线与以赛灵思为代表的 FPGA 路线
- 高频 PCB 板方面,目前常见的是将微带贴片天线集成到高频 PCB 板上,再将高频 PCB 板集成到普通 PCB 板上,同时需要在较小的集成空间中保持天线足够的信号强度。随着 77GHz 雷达的大范围运用,高频 PCB板将迎来巨大需求。

三、车载毫米波雷达波段
毫米波雷达在自动驾驶领域主要分为 3 个波段,分别是 24GHz、 77GHz 和79GHz。
24GHz 探测距离有限,在自动驾驶系统中常用于感知车辆近处的障碍物,能够实现盲点补测、变道辅助等功能。
77GHz 最大检测距离可达 160 米以上,能够用于实现紧急制动、高速公路跟车等 ADAS 功能;同时也能满足自动驾驶领域,对障碍物距离、速度和角度的测量需求。
79GHz 通信频段在 76GHz-81GHz,探测距离中等但分辨率高。根据公式:光速=波长×频率,频率越高波长越短,而波长越短有利于提高分辨率,因此 79GHz 的毫米波雷达有望成为未来的发展趋势。


不同探测距离车载毫米波雷达的 ADAS 功能
四、毫米波雷达优劣势
毫米波雷达具有全天候性、长距离探测能力、高精度和穿透性强等优势,尤其在自 动驾驶、车辆防撞等领域有着广泛的应用。
毫米波雷达作为主动感知设备不受光照条件的限制,可以在白天、黑夜以及恶劣天气条件下(如雨雪、雾霾等)正常工作, 因此具有全天候性,相比于红外传感器和超声波传感器,毫米波雷达具有更远的探测距离,通常可以探测数百米甚至几公里之外的目标,这对于远距离目标探测和追 踪具有明显优势。毫米波雷达具有较高的测量精度,能够提供较准确的目标位置和 速度信息,尤其在对小目标的探测方面表现优异。与光学传感器(如摄像头)相比, 毫米波雷达不受光照强度、方向和波长等因素的影响,因此在复杂光照条件下具有 稳定的性能。毫米波信号在大气和某些物质(如雨雪、雾霾等)中的穿透性较好, 因此毫米波雷达可以检测被遮挡的目标,对于目标检测和定位具有一定的优势。
然而,传统毫米波雷达(3D 毫米波雷达)分辨率相对较低、高度测量能力不佳、目标识别能力有限。
传统毫米波雷达准确性较低,存在如误报、虚假目标、多径等影 响因素。同时,在测量目标高度上性能不佳,通常只包含距离、方位和速度信息, 且存在杂波、噪声和低分辨率等问题,特别是在角度维度上,这最终限制了它在复 杂感知任务中的适用性。而且传统毫米波雷达点云非常稀疏,没有语义信息,对周 围环境的感知能力很差,与光学传感器相比,其在目标识别和分类方面的分辨率可 能相对较低,难以识别物体的具体特征。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









