






 本文详细探讨了移动机器人控制逻辑,涉及环境感知与建模、路径规划与导航、动作控制、反馈与调整以及避障与安全策略,展示了其背后的复杂计算和控制原理,以及在自动驾驶、物流配送和服务机器人领域的应用。
本文详细探讨了移动机器人控制逻辑,涉及环境感知与建模、路径规划与导航、动作控制、反馈与调整以及避障与安全策略,展示了其背后的复杂计算和控制原理,以及在自动驾驶、物流配送和服务机器人领域的应用。
你是否曾对那些在工厂中穿梭自如的移动机器人感到好奇?它们是如何准确无误地执行任务的?这一切都归功于移动机器人的控制逻辑!今天,就让我们深入探讨一下移动机器人控制逻辑的重点。

一、环境感知与建模技术是移动机器人实现自主导航和智能决策的基础。
-
环境感知
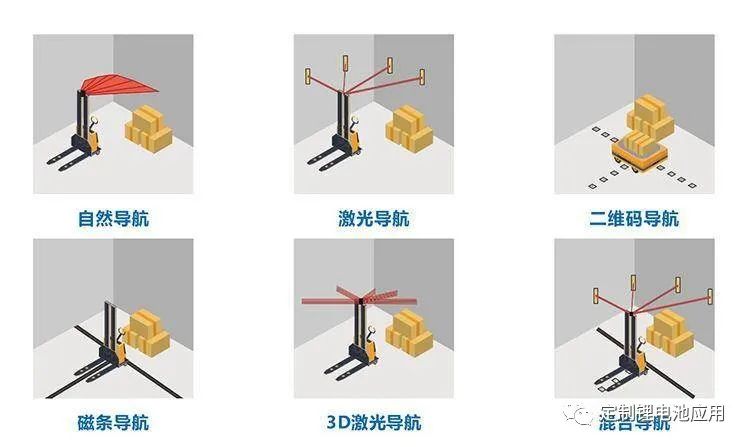
1. 传感器:移动机器人通常配备各种传感器,如激光雷达、摄像头、超声波传感器、红外传感器等,用于获取环境信息。
2. 数据融合:通过将多种传感器的数据进行融合,可以提高环境感知的准确性和可靠性。
3. 机器视觉:利用摄像头获取的图像信息,机器人可以进行目标识别、跟踪和避障等操作。
4. 定位与导航:通过使用全球定位系统(GPS)、惯性测量单元(IMU)和地图等技术,机器人可以确定自身的位置和方向,并规划出最优的路径。
-
环境建模
1. 地图构建:移动机器人通过传感器数据和定位信息,构建出环境的地图模型,包括障碍物、可行区域和路径等。
2. 模型更新:随着机器人的移动,环境可能会发生变化,因此机器人需要实时更新环境模型,以确保其准确性。
3. 语义建模:除了几何信息外,环境模型还可以包含语义信息,如物体的类别、功能等,这有助于机器人更好地理解环境。
二、路径规划与导航技术是移动机器人实现自主运动的核心。
-
路径规划方法
1. 全局规划:在已知环境地图的情况下,机器人可以使用全局规划算法,如 A* 算法、Dijkstra 算法等,找到从起点到终点的最短路径。
2. 局部规划:在未知或部分已知的环境中,机器人可以使用局部规划算法,如模糊逻辑、神经网络等,根据实时感知的环境信息规划出最优路径。
3. 混合规划:将全局规划和局部规划相结合,以提高路径规划的效率和准确性。
-
导航技术
1. 定位:机器人通过使用 GPS、惯性测量单元(IMU)、视觉传感器等技术,确定自身在环境中的位置。
2. 地图构建:机器人通过传感器数据和定位信息,构建出环境的地图模型,包括障碍物、可行区域和路径等。
3. 路径跟随:根据规划出的路径,机器人使用控制算法,如PID 控制器、模糊控制器等,实现自主导航。
三、动作控制与执行是移动机器人实现自主运动和任务执行的核心。

-
动作规划
1. 路径规划:根据环境模型和任务需求,机器人规划出从起点到目标点的最优路径。
2. 轨迹规划:在路径规划的基础上,机器人进一步规划出具体的运动轨迹,包括速度、加速度等参数。
3. 避障规划:当环境中存在障碍物时,机器人需要规划出避开障碍物的路径和轨迹。
-
动作控制
1. 电机控制:通过控制电机的转速和转向,机器人实现了精确的位置控制和运动控制。
2. 传感器反馈:利用传感器反馈的信息,机器人可以实时调整动作,以适应环境变化。
3. 控制算法:常见的控制算法包括PID 控制、模糊控制、神经网络控制等,用于提高机器人的运动精度和稳定性。
-
执行机构
1. 驱动系统:移动机器人通常采用轮式或履带式驱动系统,以实现前进、后退、转弯等基本动作。
2. 机械臂:对于一些需要操作物体的任务,机器人可以配备机械臂,通过关节运动实现抓取、搬运等动作。
3. 其他执行机构:根据具体任务需求,机器人还可以配备其他执行机构,如夹爪、吸盘等。
四、通过实时的反馈与调整,机器人可以更好地适应环境变化,提高任务完成的效率和质量。
-
反馈机制
1. 传感器反馈:机器人通过传感器获取环境信息,并将其反馈给控制系统。
2. 执行器反馈:机器人的执行器(如电机、舵机等)会将其状态反馈给控制系统,以便控制系统了解机器人的运动状态。
3. 任务反馈:机器人会将任务执行的结果反馈给控制系统,以便控制系统评估任务完成的情况。
-
调整策略
1. 传感器反馈:机器人通过传感器获取环境信息,并将其反馈给控制系统。
2. 执行器反馈:机器人的执行器(如电机、舵机等)会将其状态反馈给控制系统,以便控制系统了解机器人的运动状态。
3. 任务反馈:机器人会将任务执行的结果反馈给控制系统,以便控制系统评估任务完成的情况。
五、避障与安全是移动机器人设计和开发中至关重要的考虑因素。确保自身和周围人员的安全 。
-
避障技术
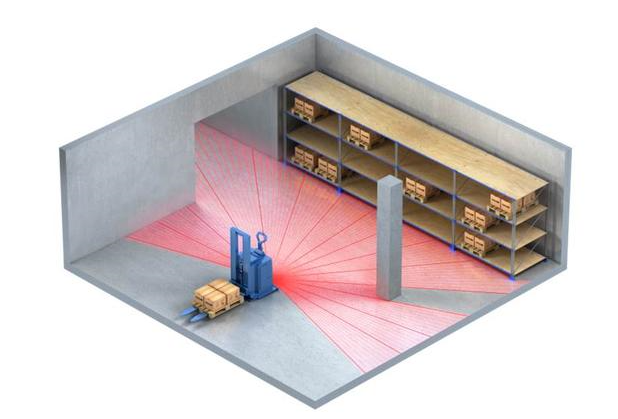
1. 传感器检测:移动机器人通常配备多种传感器,如激光雷达、摄像头、超声波传感器等,用于检测周围环境中的障碍物。
2. 数据融合:将多种传感器的数据进行融合,可以提高障碍物检测的准确性和可靠性。
3. 路径规划:基于传感器检测到的障碍物信息,机器人可以规划出一条安全的路径,避开障碍物。
4. 实时避障:在移动过程中,机器人需要实时监测周围环境,并根据新的障碍物信息调整路径。
-
安全策略
1. 碰撞检测:除了避免与障碍物发生碰撞外,机器人还需要检测自身与其他机器人或人员之间的距离,以避免发生碰撞。
2. 紧急停止:在检测到可能的危险情况时,机器人应立即停止运动,以避免造成更大的损失。
3. 安全区域:为机器人设定安全区域,当机器人进入该区域时,会自动减速或停止。
4. 人机交互:在机器人与人员共同工作的场景中,需要建立有效的人机交互机制,确保人员的安全。
六、应用案例
1. 自动驾驶汽车:路径规划与导航技术在自动驾驶汽车中得到广泛应用,以实现自主驾驶和导航。
2. 物流配送:移动机器人可以在仓库中进行货物的搬运和配送,通过路径规划与导航技术提高效率和准确性。
3. 服务机器人:在酒店、医院等场所,服务机器人可以利用路径规划与导航技术提供导航、引导和信息查询等服务。
通过对移动机器人控制逻辑的重点分析,我们可以看到,这些看似简单的任务背后,隐藏着复杂而精密的计算和控制。正是这些控制逻辑,让移动机器人能够在各种环境中高效地工作。

















 2485
2485

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









