





数据集
TUM (动态)
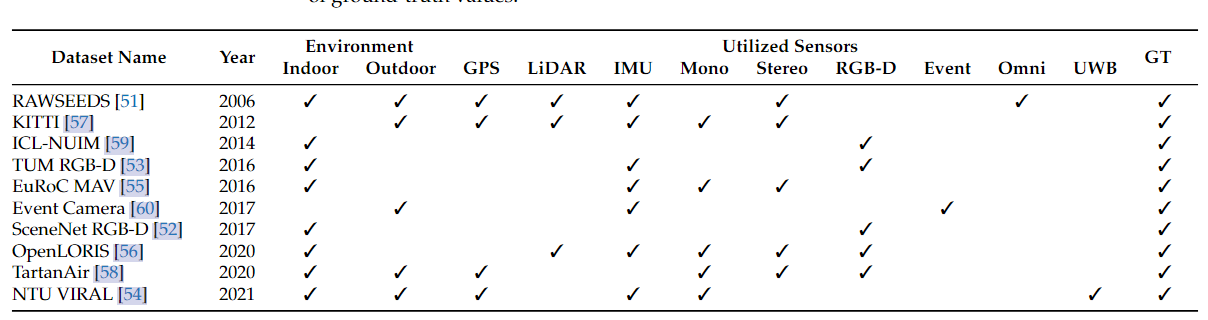
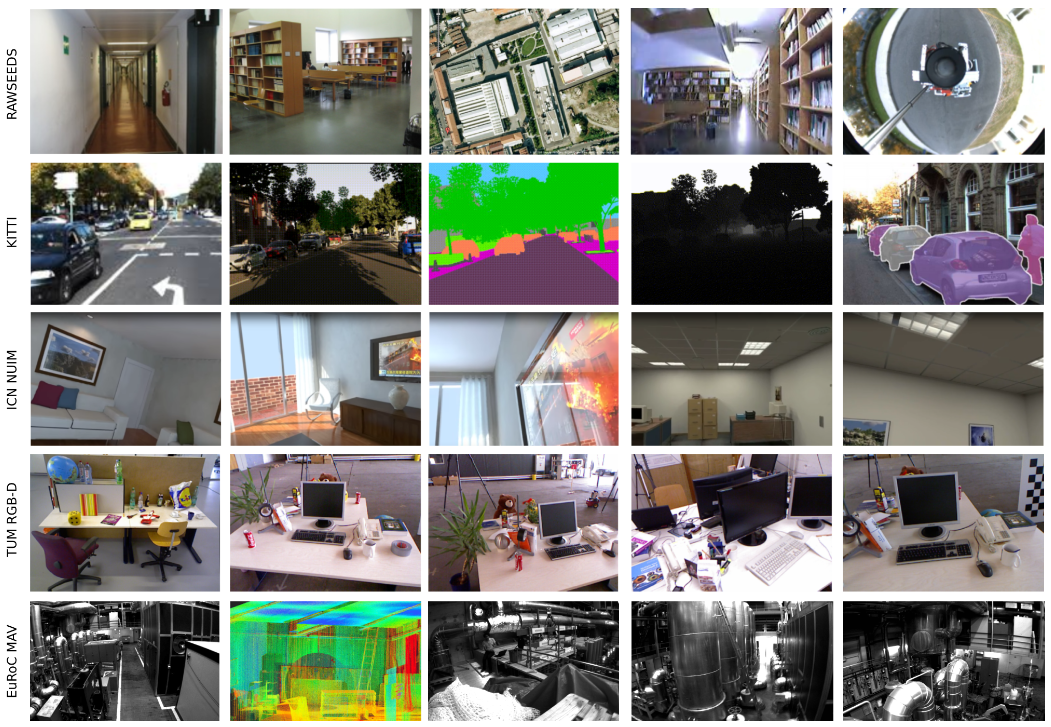
TUM 数据集由 RGBD 传感器收集,提供不同纹理、光照和结构条件下的室内图像序列。根据不同的要求,分为TUM RGB-D[72]、TUM MonoVo[73]和TUM VI[74]。 TUM RGB-D 包含真实轨迹的颜色和深度图像,并提供来自 Kinect 传感器的加速度数据。 TUM MonoVO 是一个用于评估单目视觉和 SLAM 方法跟踪精度的数据集,它包含来自室内和室外环境的 50 个真实世界序列,并且所有序列都经过光度校准。 TUM VI 数据集提供了评估视觉惯性里程计的标准,提供了高动态范围和光度校准图像,可以使用不同的序列集在不同的场景中进行评估。
KITTI
KITTI[75]是目前全球最大的自动驾驶场景计算机视觉算法评估数据集,包含城市、乡村、高速公路场景采集的真实图像数据,具有不同程度的遮挡。
包含从移动车辆捕获的图像对,以及通过 GPS 和 Velodyne 激光扫描仪获得的室外真实场景序列和地面实况。用于移动机器人算法的大型计算机视觉数据集,包含 200 个立体对和帧序列(约 42,000 帧)。该数据集是立体视频、激光雷达 3D 点云和车辆轨迹的大数据源。
Oxford
Oxford [76] 数据集包含牛津一段连续道路的数据,其中包含各种天气条件下的行人、车辆和道路施工场景。
ASL Kinect
ASL Kinect [77] 数据集提供了一个基于 ROS 的模块化 ICP 库。
ASL RGB-D
ASL RGB-D [78]数据集主要用于测试机器人路径规划算法的性能。
ICL-NUIM
ICL-NUIM [79] 数据集旨在对 RGB-D、视觉测距和 SLAM 算法进行基准测试。
VaFRIC
VaFRIC [80] 数据集可以测试不同曝光时间对相机跟踪的影响。
EuRoC
EuRoC [81] 数据集侧重于评估真实工业场景中的视觉惯性 SLAM 算法。

以上,出自文章SLAM Overview: From Single Sensor to Heterogeneous Fusion

以上出自文章Visual SLAM: What are the Current Trends and What to Expect?
NICE-SLAM中的数据集
We consider 5 versatile datasets: Replica [44], ScanNet [13], TUM RGB-D dataset [45], Co-Fusion dataset [39], as well as a self-captured large apartment with multiple rooms. We follow the same pre-processing step for TUM RGB-D as in [53].
Replica[44]:
是一个高质量的各种室内空间重建数据集。每个重建都具有干净密集的几何形状、高分辨率和高动态范围纹理、玻璃和镜面信息、平面分割以及语义类和实例分割。详见技术报告。















 6151
6151











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









