







说明:根据B站上的视频学习的,以下内容仅作为笔记,方便自己查看。
simulink模型



方法一:
1、双击PID模块。

2、显示PID参数值。

3、调节与撤回。(看图像,调到合适程度即可)

4、将PID的参数值输入到PID模块参数框中。
方法二:
1、设定输入信号;

2、设定输出信号;

3、控制系统的调整;
4、

5、添加输入输出信号;

6、

7、依旧添加输入输出,以及设置时间常数0.5、没有过冲0。

8、

9、

10、

11、双击PID模块查看参数;

12、点击运行——得到理想图。

方法三:
 https://www.bilibili.com/video/BV1qh411v7JJ?share_source=copy_web
https://www.bilibili.com/video/BV1qh411v7JJ?share_source=copy_webPID参数确定
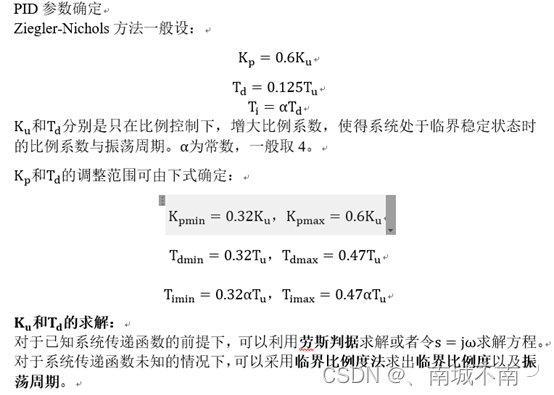
Ziegler-Nichols方法一般设:
Kp=0.6Ku![]()
Td=0.125Tu![]()
Ti=αTd![]()
Ku![]() 和Td
和Td![]() 分别是只在比例控制下,增大比例系数,使得系统处于临界稳定状态时的比例系数与振荡周期。α
分别是只在比例控制下,增大比例系数,使得系统处于临界稳定状态时的比例系数与振荡周期。α![]() 为常数,一般取4。
为常数,一般取4。
Kp![]() 和Td
和Td![]() 的调整范围可由下式确定:
的调整范围可由下式确定:
Kpmin=0.32Ku,Kpmax=0.6Ku![]()
Tdmin=0.32Tu,Tdmax=0.47Tu![]()
Timin=0.32αTu,Timax=0.47αTu![]()
Ku![]() 和Td
和Td![]() 的求解:
的求解:
对于已知系统传递函数的前提下,可以利用劳斯判据求解或者令s=jω![]() 求解方程。
求解方程。
对于系统传递函数未知的情况下,可以采用临界比例度法求出临界比例度以及振荡周期。














 493
493











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









