






前言:最近项目需要,要做一个障碍物识别,只要求输出障碍物坐标,不要求知道障碍物类别。由于障碍物类别不常见,不能用类似于yolo这样的来识别(因为没有数据集)。找了半天找到这个建图的方法,感觉可以一试。以下是一些复现过程。供大家参考。
主要参考了以下链接:
https://blog.csdn.net/sweetorange_/article/details/112252933
我使用的是ubuntu20.04 , Ros noetic.
后面要用到保存地图的东西之类的,不管,先安装(indigo换成自己的ros版本)
sudo apt-get install ros-indigo-octomap-ros #安装octomap
sudo apt-get install ros-indigo-octomap-msgs
sudo apt-get install ros-indigo-octomap-server
————————————————
原文链接:https://blog.csdn.net/weixin_42403417/article/details/128305801sudo apt-get install ros-indigo-octomap-rviz-plugins #安装octomap ros插件一、下载源码
git clone https://github.com/RuPingCen/publish_pointcloud.git或者直接上github下载.zip,个人跟喜欢这种方法:https://github.com/RuPingCen/publish_pointcloud
这个代码应该也是参考了某篇,但我硬是找不到那篇在哪了,请原作者多多包涵。
二、创建一个自己的工作空间并编译
参考这篇,好久没用ros都忘了咋建了。。
mkdir octomap_ws #进入你想要创建文件夹的目录,新建工作空间
cd octomap_ws/ #进入工作空间
# 创建src功能包
mkdir src/
#把前面下载的github源码放入src文件夹
#回到工作空间目录
# source 环境变量
source devel/setup.bash
# 编译
catkin_make
#我使用的是ros1 noetic,但我直接使用这个,命令编译会报错,改为:
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
注意,你的文件结构应该是这样的:

三、测试自己的点云数据文件并可视化
1.在data目录下有测试文件,把它放到工作空间目录下:

2.然后修改launch文件夹下的demo.launch文件中的文件路径:
<node name="publish_pointcloud" pkg="publish_pointcloud" type="publish_pointcloud">
<param name="path" value="$(find publish_pointcloud)/data/test.pcd" type="str" />3.接下来就是启动节点啦!
roslaunch publish_pointcloud demo.launch启动节点后rviz就会弹出来。出现这个界面:
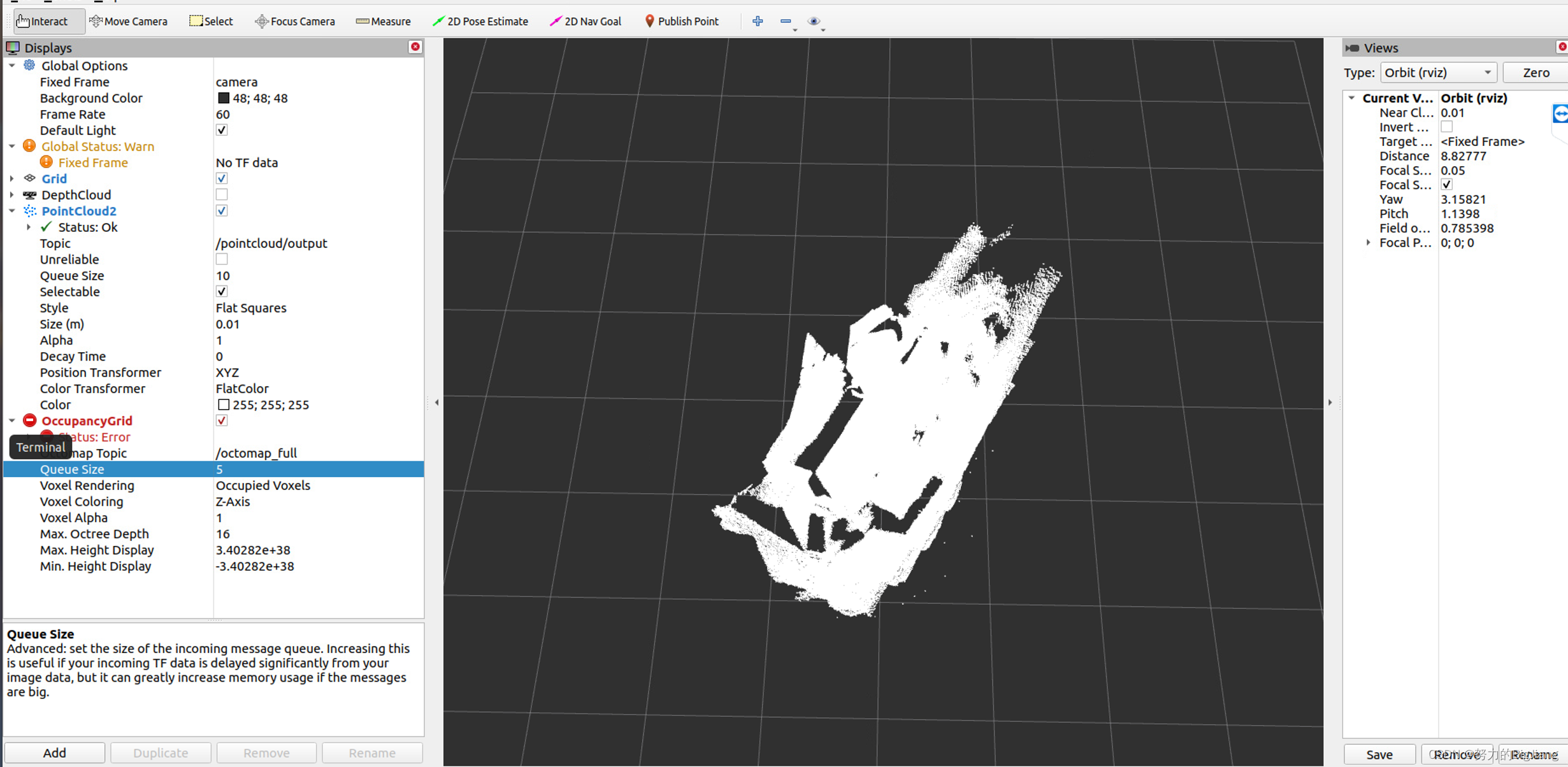
这里要注意你选择的话题。
我记得我还测了另一个文件,效果是这样的:
——————————————————
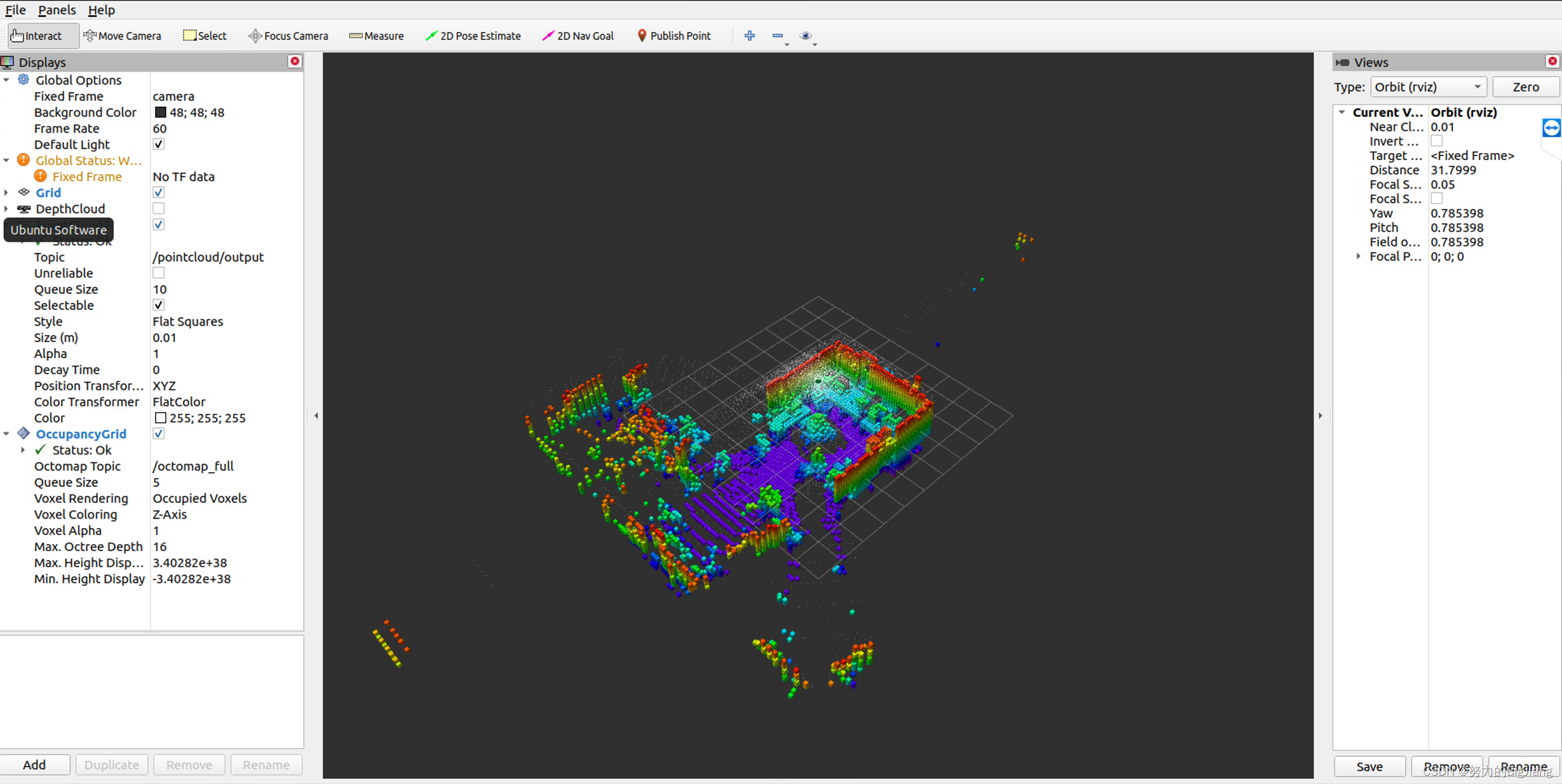
更新,后来我找到上面这个图是从哪里来的了:
这个代码里复现来的,如果你复现别的失败了,用这个
四、保存地图
ROS的octomapserver保存地图_octomap保存地图-CSDN博客
参考的这个
rosrun octomap_server octomap_saver -f <filename.bt>
<filename.bt> 是要保存的文件名,它将保存为二进制 OctoMap 格式。
你可以将其替换为您想要的任何文件名和路径。
如果你想看保存的地图:将文件名替换为你自己的
octovis my_map.bt
我发现还有个教程也写得很详细啊:pointcloud_publisher: 将点云文件内容数据发布到话题 /pointcloud/output、使用octomap_server_node接收数据并生成Octomap、使用rviz查看点云及对应的Octomap
写在最后:这次只是简单的跑了一下octomap,体会了一下。但还是有很多疑惑的地方。官方给出了不同的版本。其中ros版本是我想用的,但是它已经集成好了。也就是说我如果想对源码进行修改的是不可以的(个人理解,不知道对不对)。但是为了后续项目优化之类的,我是需要对源码进行修改的。所以这个我不能直接拿来用。我要实现的目标是:
(1)能够对源码进行修改;
(2)实时读取点云数据,生成地图。
应该还会接着写这个东东。加油吧!















 2039
2039











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









