






项目需要,使用mid360,我是参考以下链接做的:
Mid-360 快速配置指南 | JiaFan's Blog
先说我的电脑配置:ubuntu20.04,ros noetic
一、下载安装Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
#这样可能下载不下来,那就直接去官方链接下载zip,解压就行,注意对应文件名
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
二、安装livox_ros_driver2
注意不要下载错版本
# 先创建一个工作空间
mkdir -p catkin_livox_ros_driver2/src
#下载,同理,下载不下来去直接下zip文件解压,注意文件名。把下载下来的文件夹放入src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
cd livox_ros_driver2
source /opt/ros/noetic/setup.sh #换成你自己的ros版本
./build.sh ROS1
我在最后一步失败了,cmake报错,去看了下build.sh的内容。发现直接编译也行:
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
#
source devel/setup.bash
#注意工作目录路径三、连接Mid-360
这个直接参照链接里的做。
啊啊啊啊!这里之前踩大坑!之前用另一款雷达,一直在网上搜索怎么配置静态ip,好像都不太行。原来这么简单。。
这里主要讲一下修改/src/livox_ros_driver2/config/MID360_config.json中对应的IP地址:
注意每个雷达的地址都是独一无二的,在包装盒上SN码。默认地址:192.168.1.1**,**是雷达SN码的最后两位。
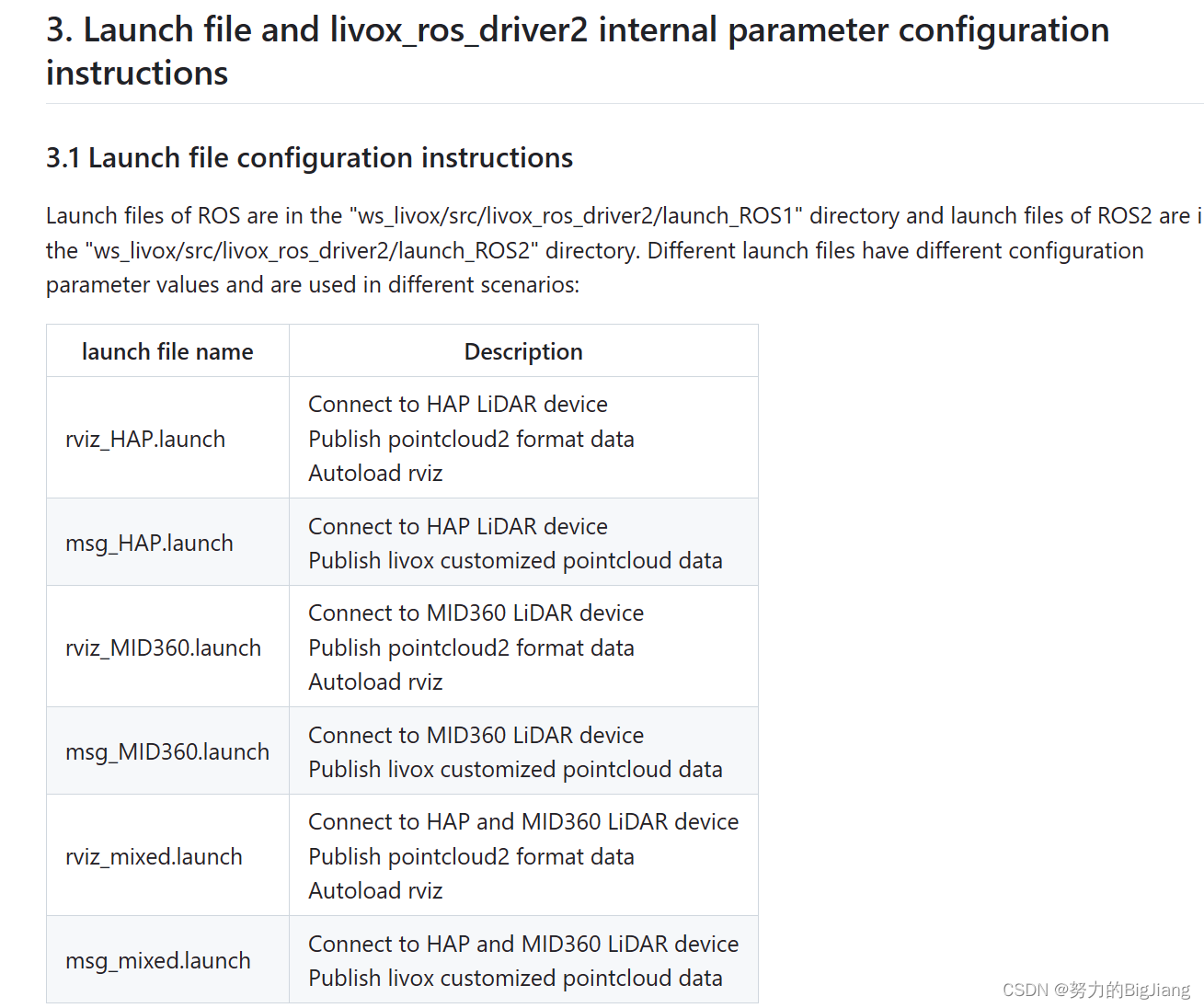
四、运行launch文件
roslaunch livox_ros_driver2 rviz_MID360.launch这里launch文件有多个,选择你想要的运行:https://github.com/Livox-SDK/livox_ros_driver2
参考官方说明。
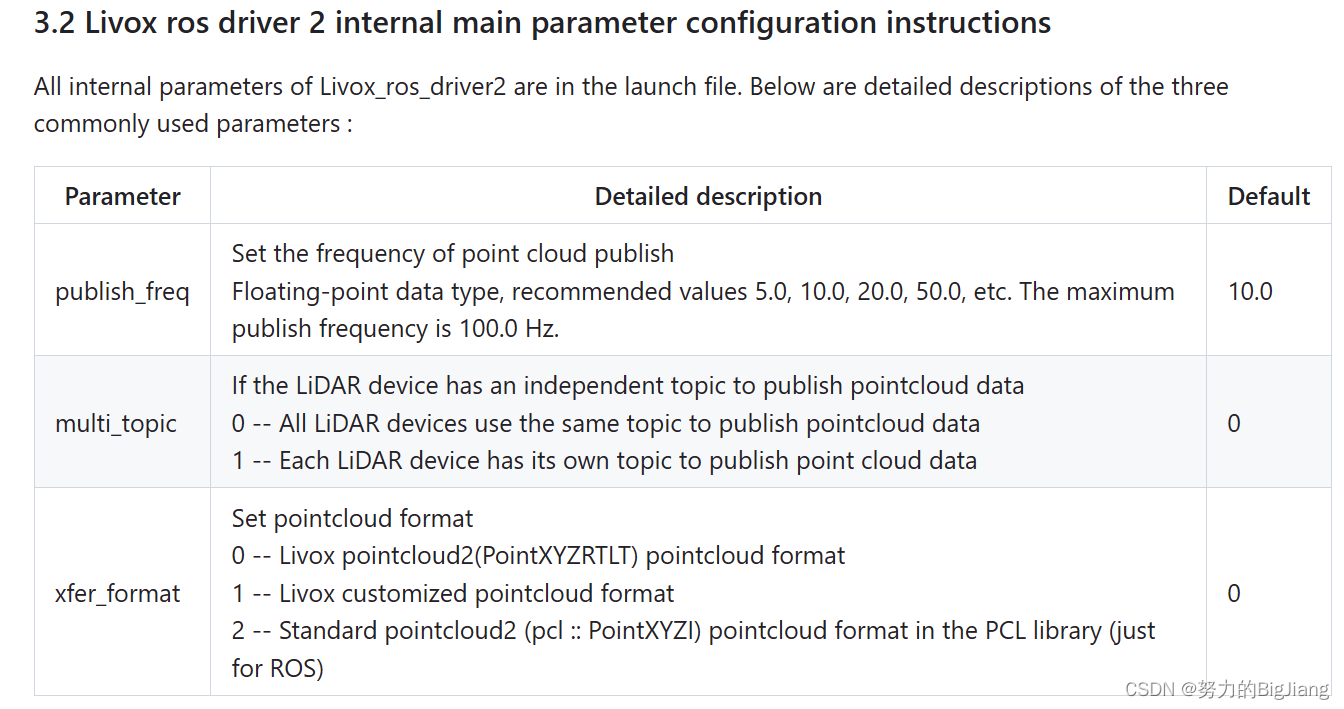
这里非常关键!!!看看教程里说的:
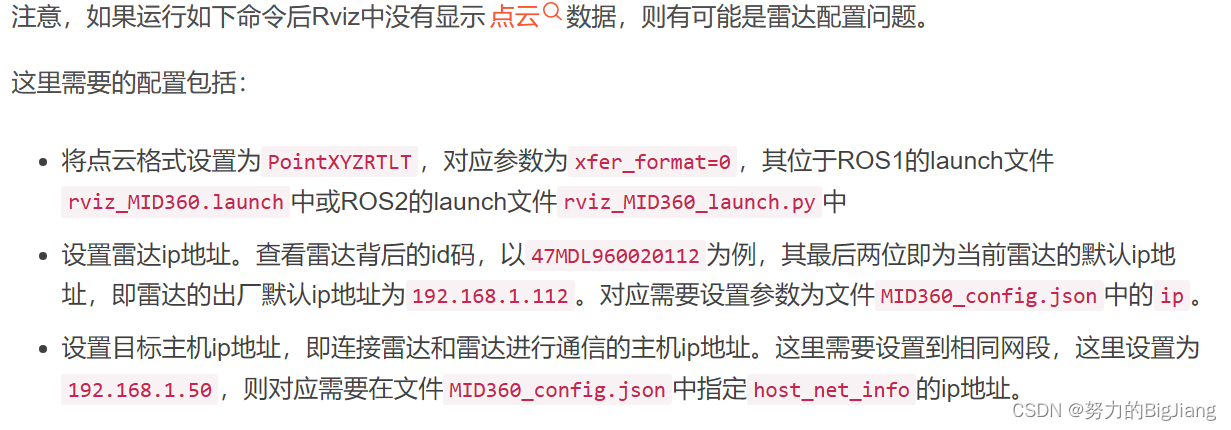
对应第一点:launch文件里对应的参数默认值为“0”,可以看官方说明第三行,0一斤是需要的点云格式。
对应第二点:雷达ip地址就是192.168.1.1**,**是SN码后两位,要在config文件里去更改。
对应第三点:设置主机ip地址,默认192.168.1.50
以上两点在参考教程中很清楚了。
五、运行效果
设置好,运行就成功喽!
看看效果:
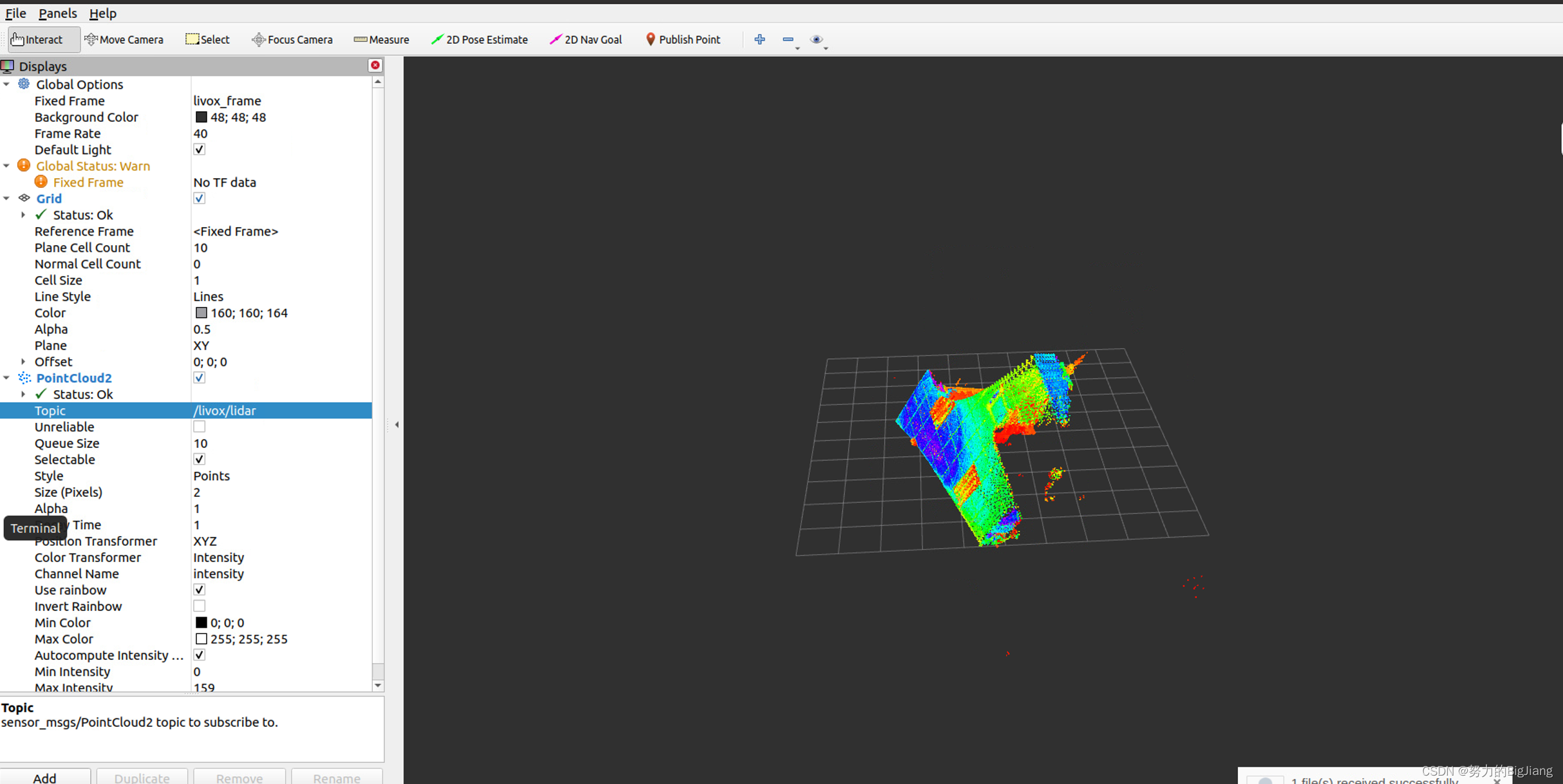
如果你想保存这个文件,可以看到图片里话题的名称,直接rosbag record就行:
rosbag record -a
名字可以自己改。
如果你想回放:
rosbag play livox_lidar_data.bag
#然后启动rviz
roscore #一定要记得启动roscore
rviz
这里需要注意,需要设置“Fixed Frame” 为“livox_frame”。add选择“Displays 面板中配置 PointCloud2,设置话题为 /livox/lidar”。否则没有画面哦。
成功喽!官方的文件真的不好读,需要耐心。感谢各位大神的分享!以后应该还会更新一些mid360的内容,比如在平台上部署。
最后再放几个官方说明:
2.1. 单雷达数据采集 — Livox wiki 0.1 文档
最后再补充一点,官方是有一个可视化软件的:livox viewer。但我运行版本1没有连接上雷达,运行版本2会保存,好像是内存崩溃?无所谓了,用ros更方便后面的研究。

















 2561
2561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









