






一,SV660运动控制轴的添加
1.导入xml文件
(1)打开Autoshop软件,右键点击右上角EtherCAT Device,点击导入设备
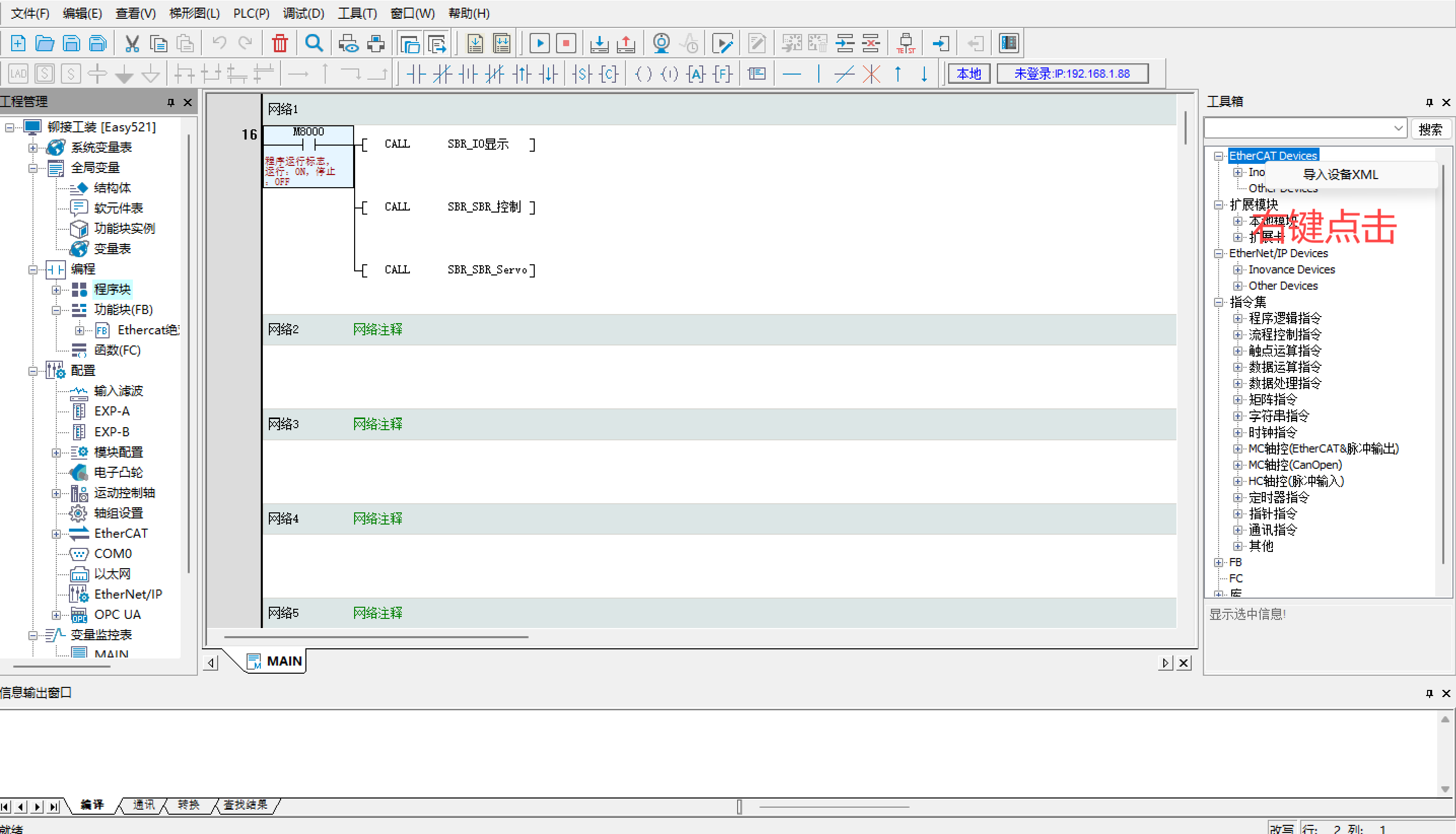
图1 导入设备XML文件
(2)选中文件导入(xml文件去汇川官网上下载)
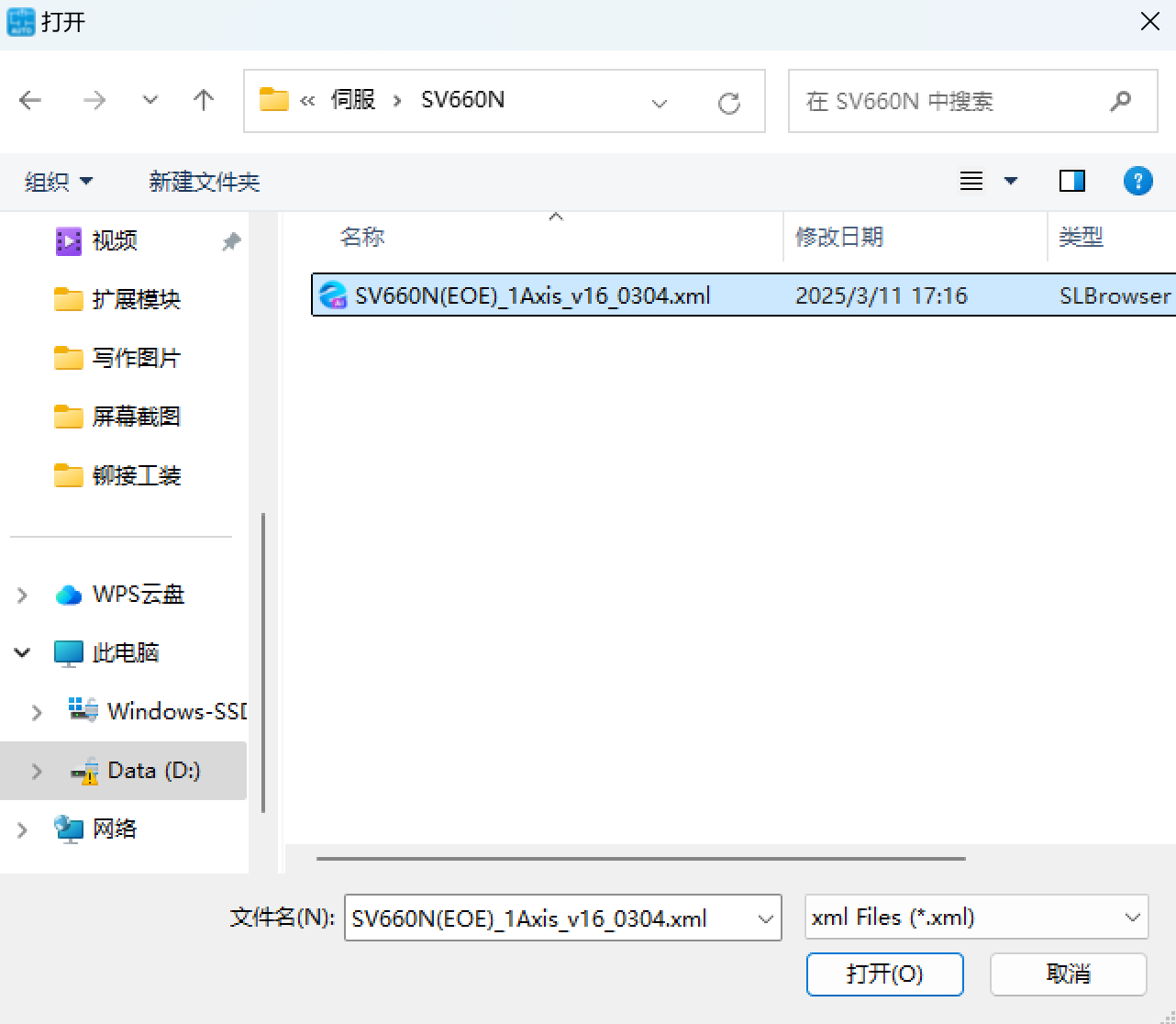
图2 导入文件
2.点击自动扫描添加设备,再点击添加对应数量的轴(几个伺服驱动几个轴)
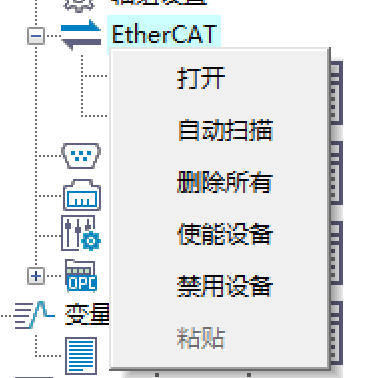
图3 点击自动扫描添加设备
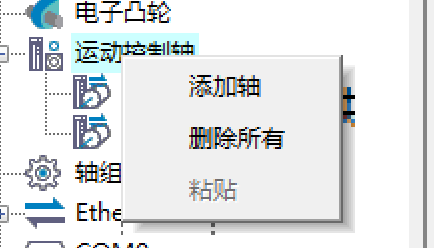
图4 点击添加对应数量的轴
二,轴参数的设定
1.对于设备参数的设定
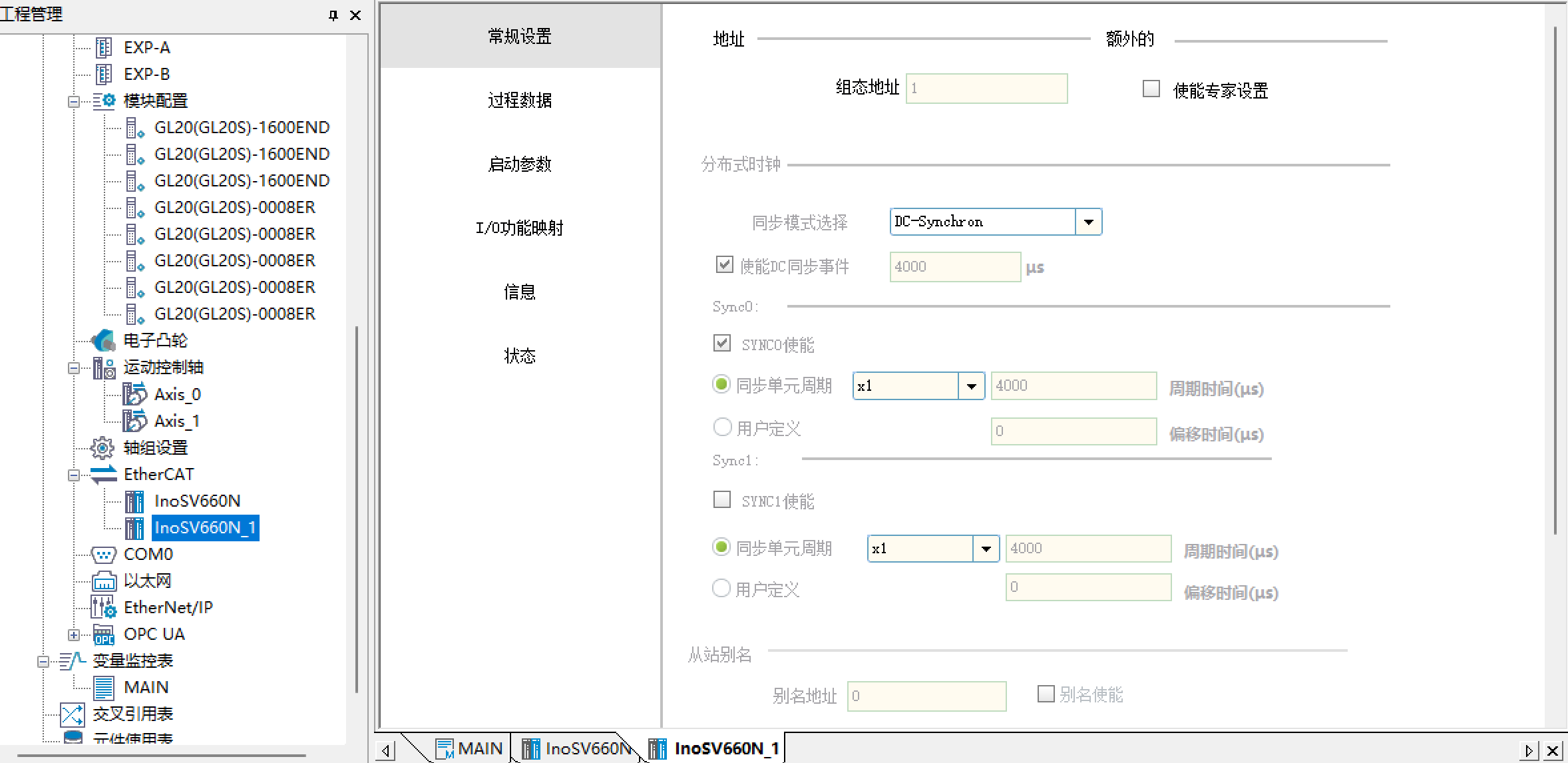
图5 设备参数
检查伺服电机是否接线正常,对于设备参数的设定,点击自动扫描后,自动生成的默认参数即可。
2.轴参数基本设置
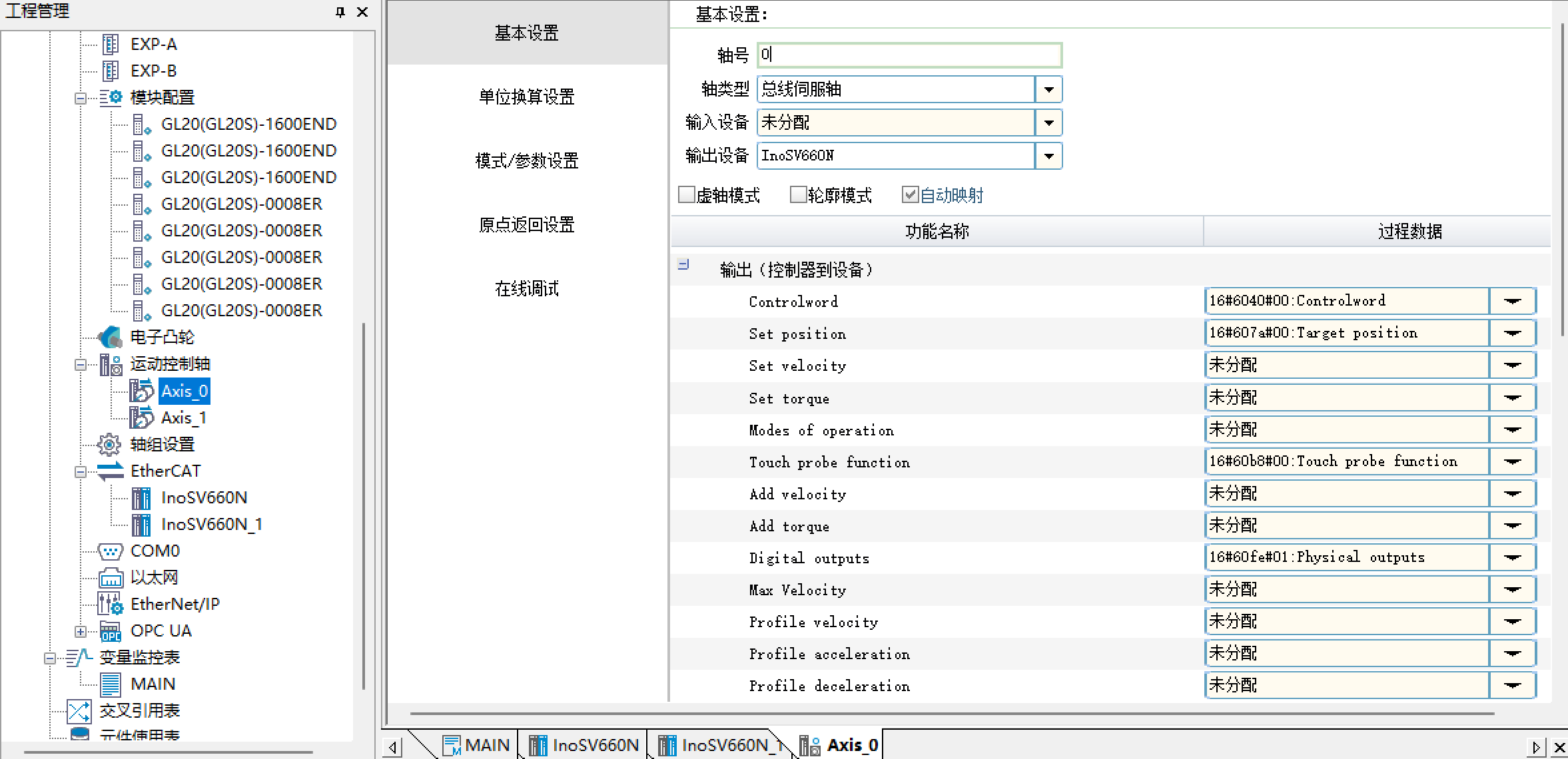
图6 基本参数设置
基本设置应设置轴号(多轴无重复即可),轴类型(汇川伺服采用EtherCAT总线控制)选择总线伺服轴,输入设备不用选,输出设备选择轴控制的伺服设备即可。点击自动映射,其他的默认即可。
3.轴参数单位换算设置
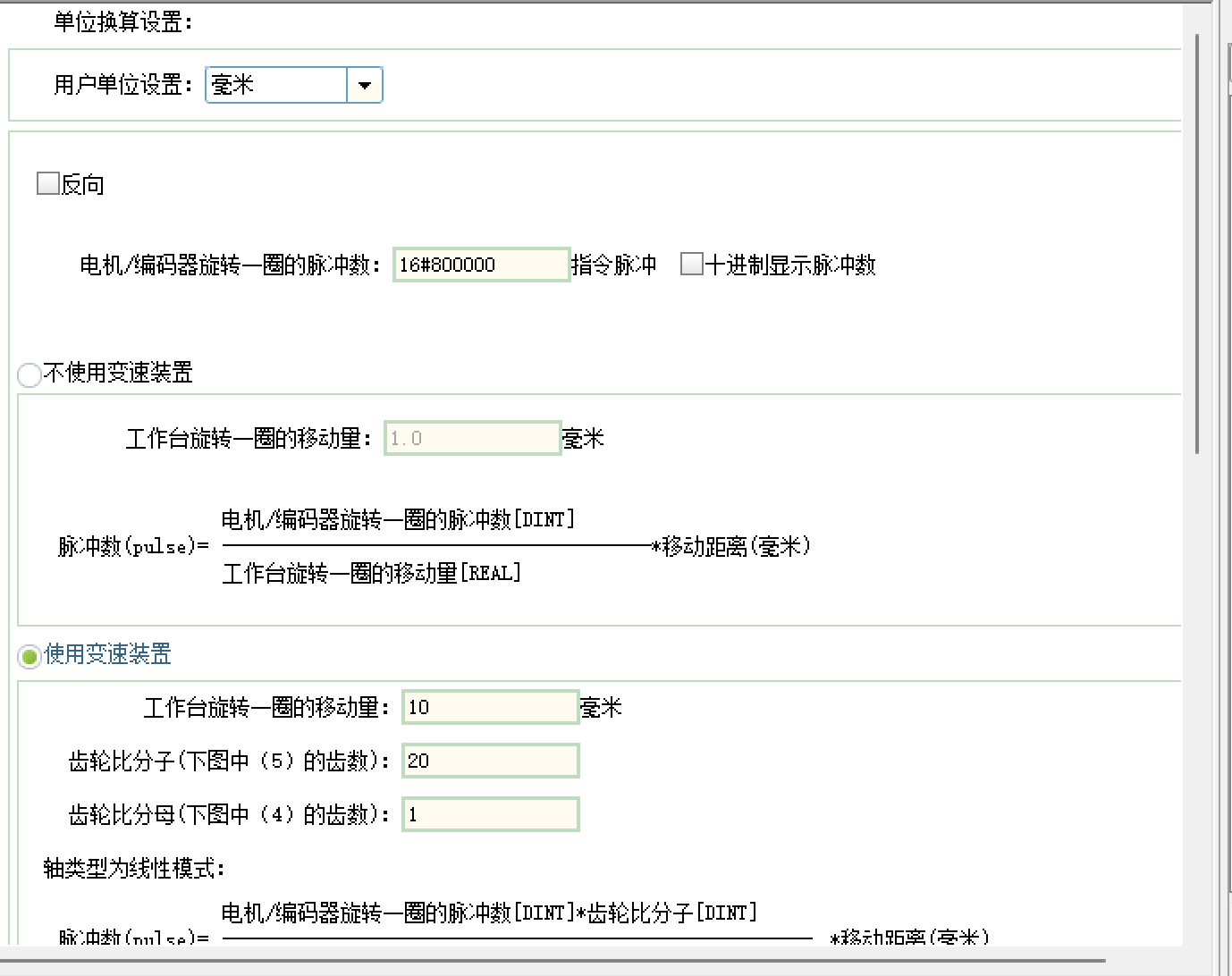
图7 单位换算设置界面
(1)用户单位设置(位置控制)选择毫米。
(2)编码器旋转一圈脉冲数(这个去伺服驱动器说明书里找,也可以找汇川客服问,我这个是SV660N,编码器转一圈输出脉冲为2的23次方)2的23次方。
(3)对于变速装置的使用(即你这套伺服系统有没有配减速机,若配有减速机,去问机械安装那边减速比是多少,则选择使用变速装置,若不配减速机,它会默认计算电子齿轮比),问机械工作台转一圈是多少毫米,我这里是10mm,减速比为20:1。
4.轴参数模式参数设置
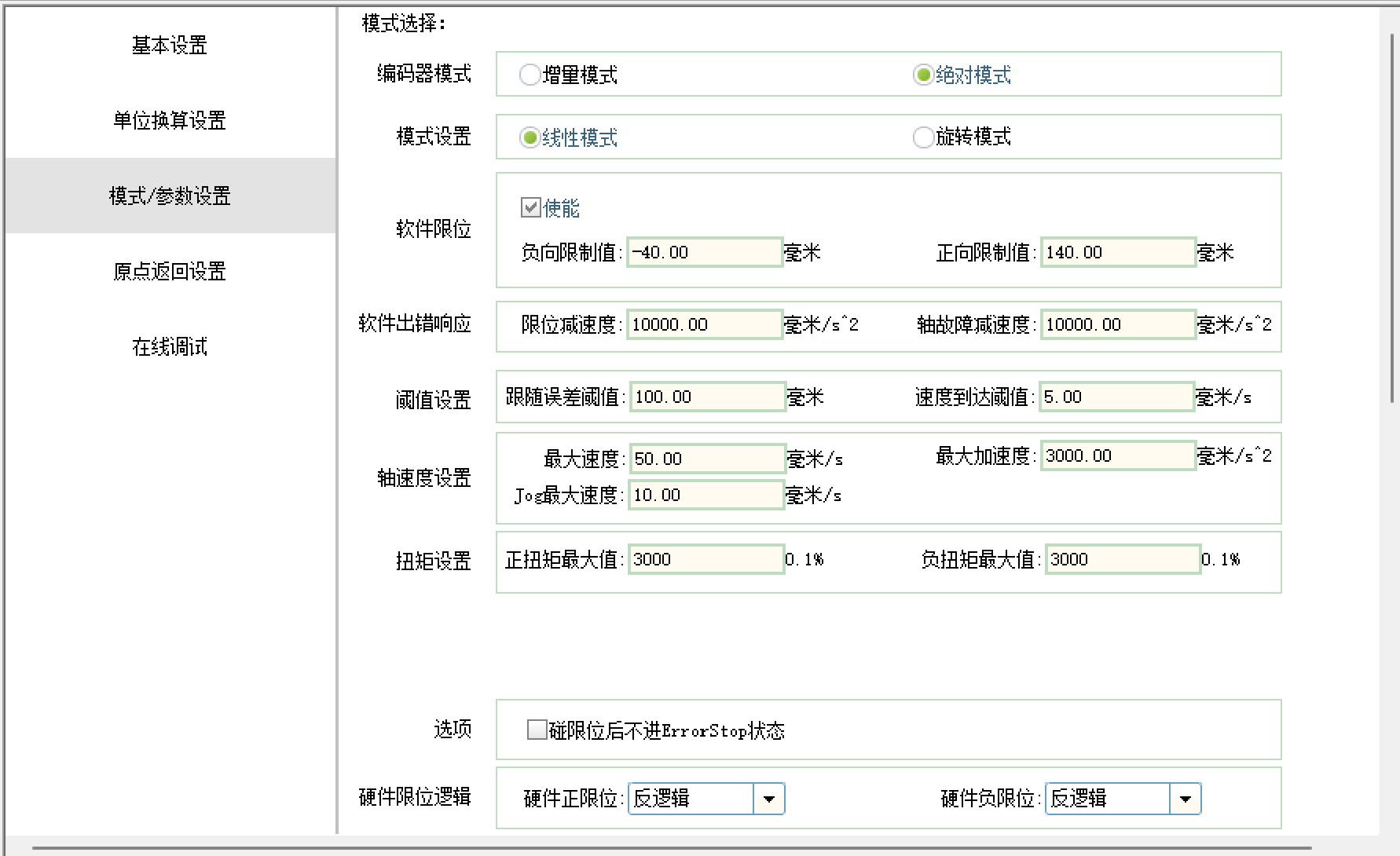
图8 模式/参数设置
(1)编码器模式增量式模式为没有固定原点,每次以自身位置为原点进行位置移动,绝对值模式为有固定可设置原点,选择绝对值模式。
(2)模式选择分为线性模式与旋转模式,线性模式即进行长度距离的移动,对于旋转模式,即进行角度的移动,由角度圈数衡量伺服丝杆位置变化。选择绝对模式。
(3)软件限位,即以原点为中心,伺服正向负向最多能走的距离,设置负向为40mm,正向限制140mm。
(4)软件出错响应,即碰到软件或者硬件限位以及轴故障后,伺服的减速加速度(决定伺服停止的快慢),设置的大一点,10000,10000
(5)阈值设置,跟随误差阈值(由于机械刚性或其他原因,伺服实际位置与指令位置的误差值,超过这个值伺服报警)机械要求精度高即可设置小一点,要求精度不高即可设置大一点减少报警次数。速度到达阈值(伺服实际速度与指令速度的误差最大值,超过这个值即伺服报警)机械要求精度高即可设置小一点,要求精度不高即可设置大一点减少报警次数。
(6)轴速度设置,即伺服移动的速度最大值与最大加速度值设定,Jog速度即点动控制时的最大移动速度。
(7)扭矩设置,即伺服正负向移动时的扭矩大小,防止碰撞损坏设备可以设置的小一点。
(8)选项,即碰到限位后,伺服是否立刻停止报错。
(9)硬件限位设置逻辑,常开响应即为正逻辑,常闭响应即为负逻辑(如急停)。
5.原点返回设置

图9 原点返回方式设置
本次选择回零方式35即设置当前位置为绝对值坐标的原点,本次设置在于设置坐标原点,非常方便调试,其他内容选择默认即可,选择原点返回列表方式后,其他会自动变化,无需调整。
以上内容完成后即轴参数设置完毕。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









