






 CondLaneNet是一种针对车道线检测的深度学习算法,它解决了实例检测和交叉线处理的挑战。模型由ProposalHead和ConditionalShapeHead组成,能动态预测车道线实例及其形状。在CULane数据集上,该模型实现了79.69%的精度,优于原论文结果,且具有较高的实时性。
CondLaneNet是一种针对车道线检测的深度学习算法,它解决了实例检测和交叉线处理的挑战。模型由ProposalHead和ConditionalShapeHead组成,能动态预测车道线实例及其形状。在CULane数据集上,该模型实现了79.69%的精度,优于原论文结果,且具有较高的实时性。
★★★ 本文源自AI Studio社区精品项目,【点击此处】查看更多精品内容 >>>
CondLaneNet: 使用动态卷积核预测每一条车道线
本项目基于PPLanedet对CondLaneNet进行复现,PPLanedet中目前复现了SCNN、RESA、RTFormer、UFLD、CondLaneNet等高性能车道线检测算法,欢迎大家使用
1 引言
近年来,基于深度学习的车道线检测技术取得很大进展,但仍有挑战。挑战之一为车道线的实例检测,通常做法是将不同的车道线检测为不同的类别,但该方法通常需要预定义最多能检测到的车道线条数;另外一种做法是对语义分割的结果进行聚类,得到不同的车道线,该方法无法解决车道线交叉、密集的场景。如下图所示。
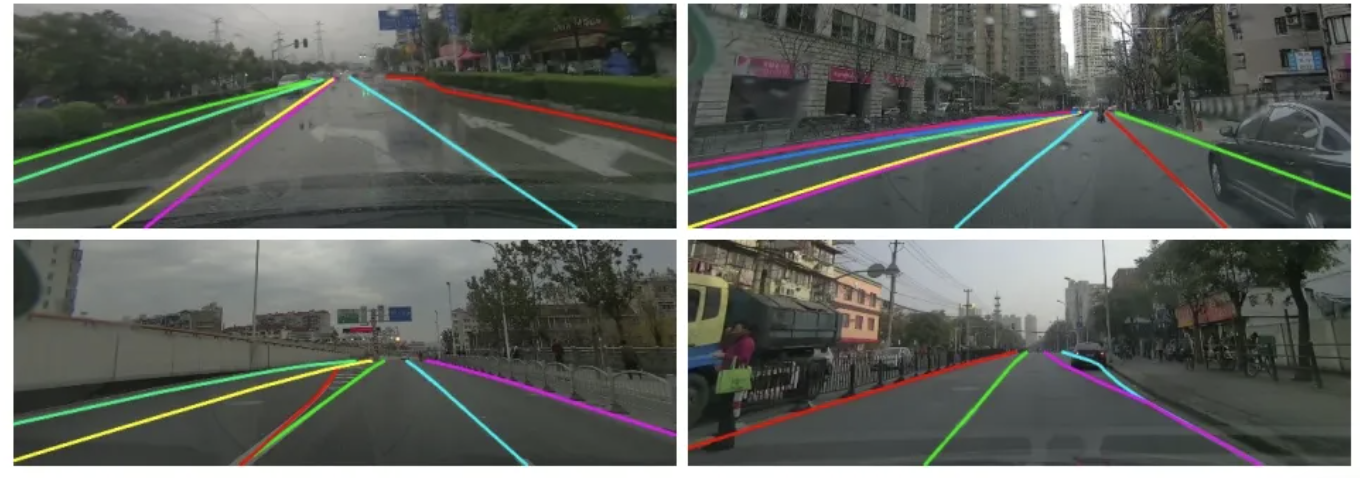
作者借鉴了分割领域中的conditional instance segmentation策略,参考CondInst和SOLOv2,将其适配到车道线检测任务中,提出了新的车道线检测算法CondLaneNet,来解决车道线的实例检测问题。
CondLaneNet能够解决交叉线等复杂场景,且具有端到端和推理速度快的优势
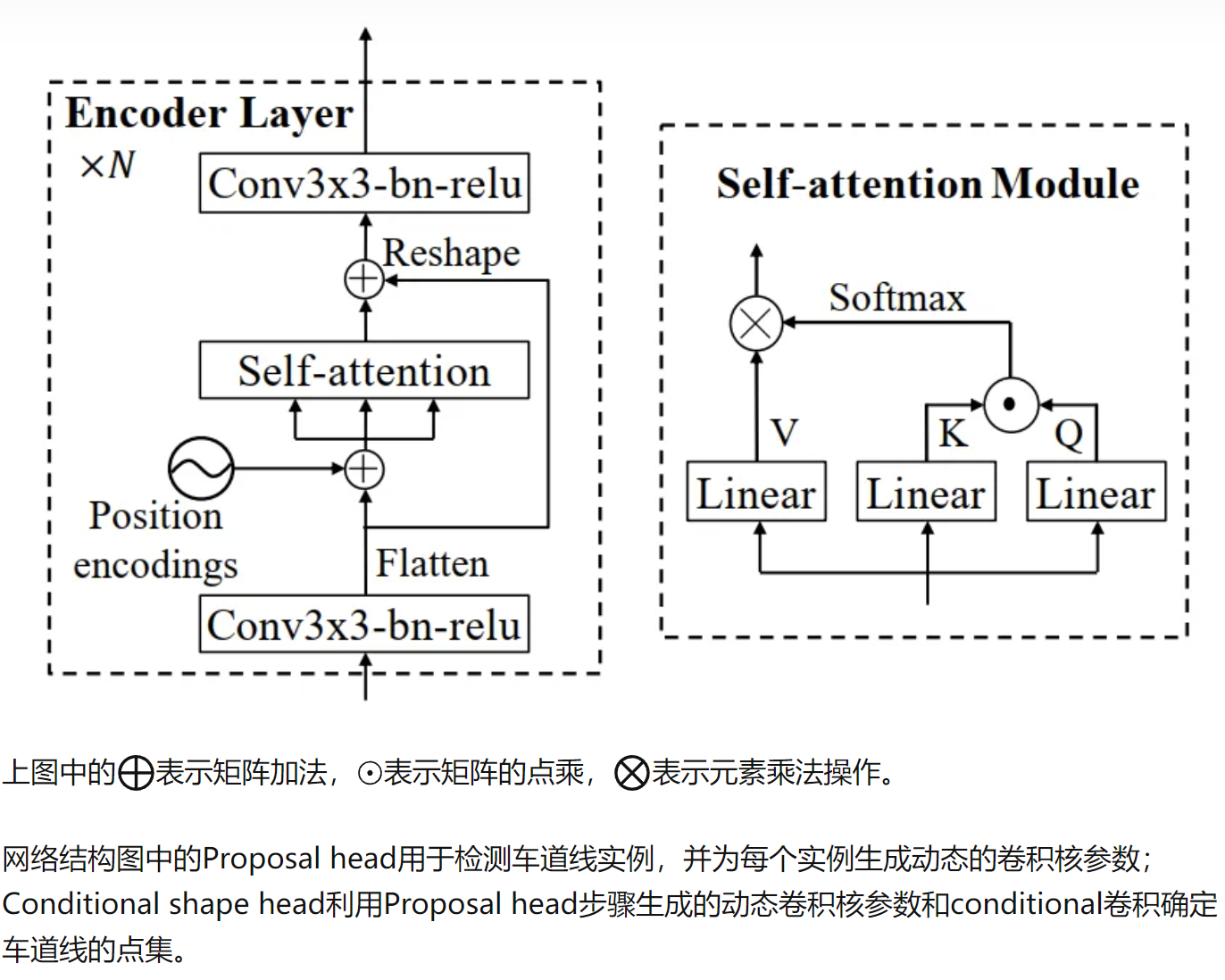
2 模型整体结构
由于笔者不太会在markdown里面敲公式,故以图片的方式展示。
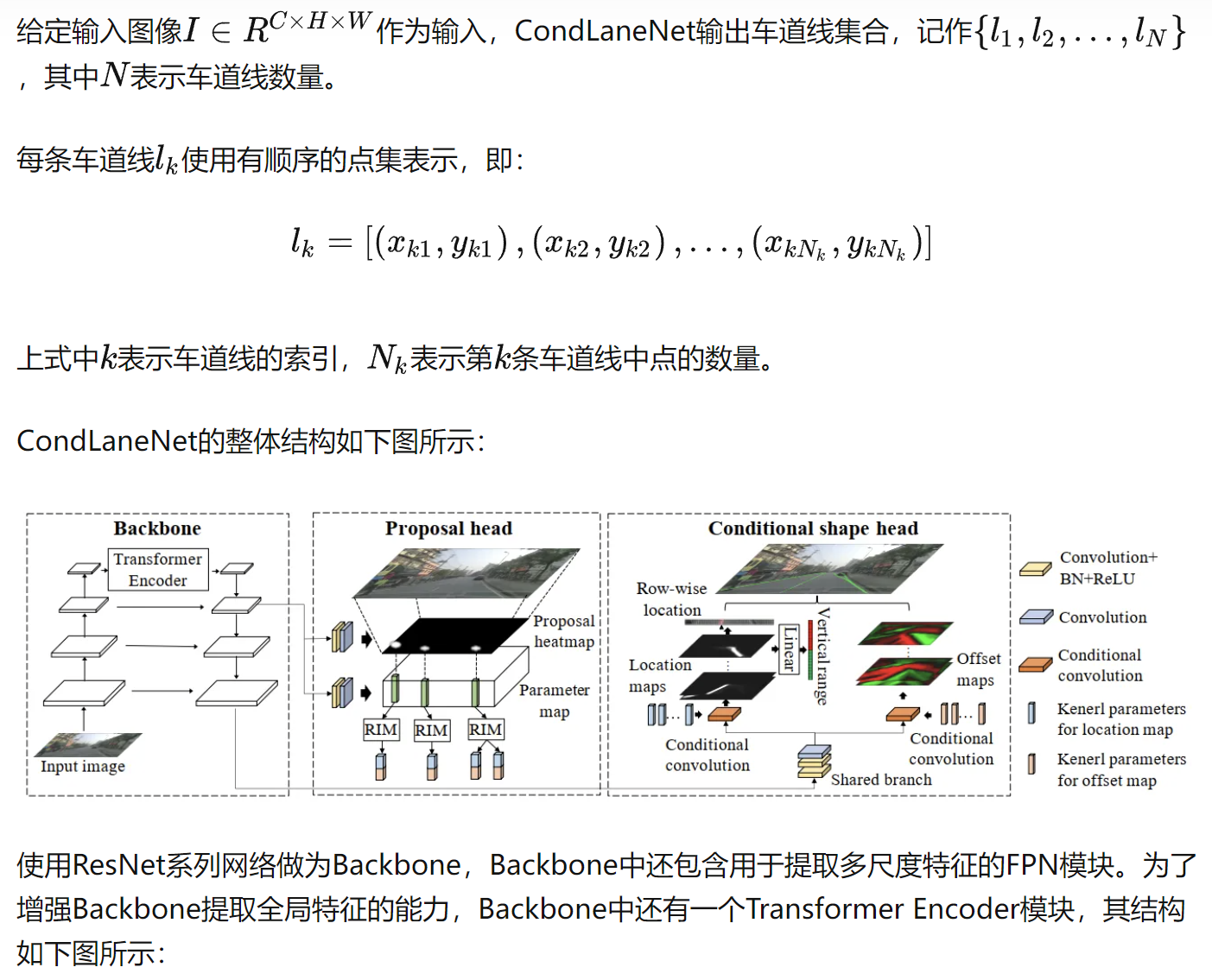
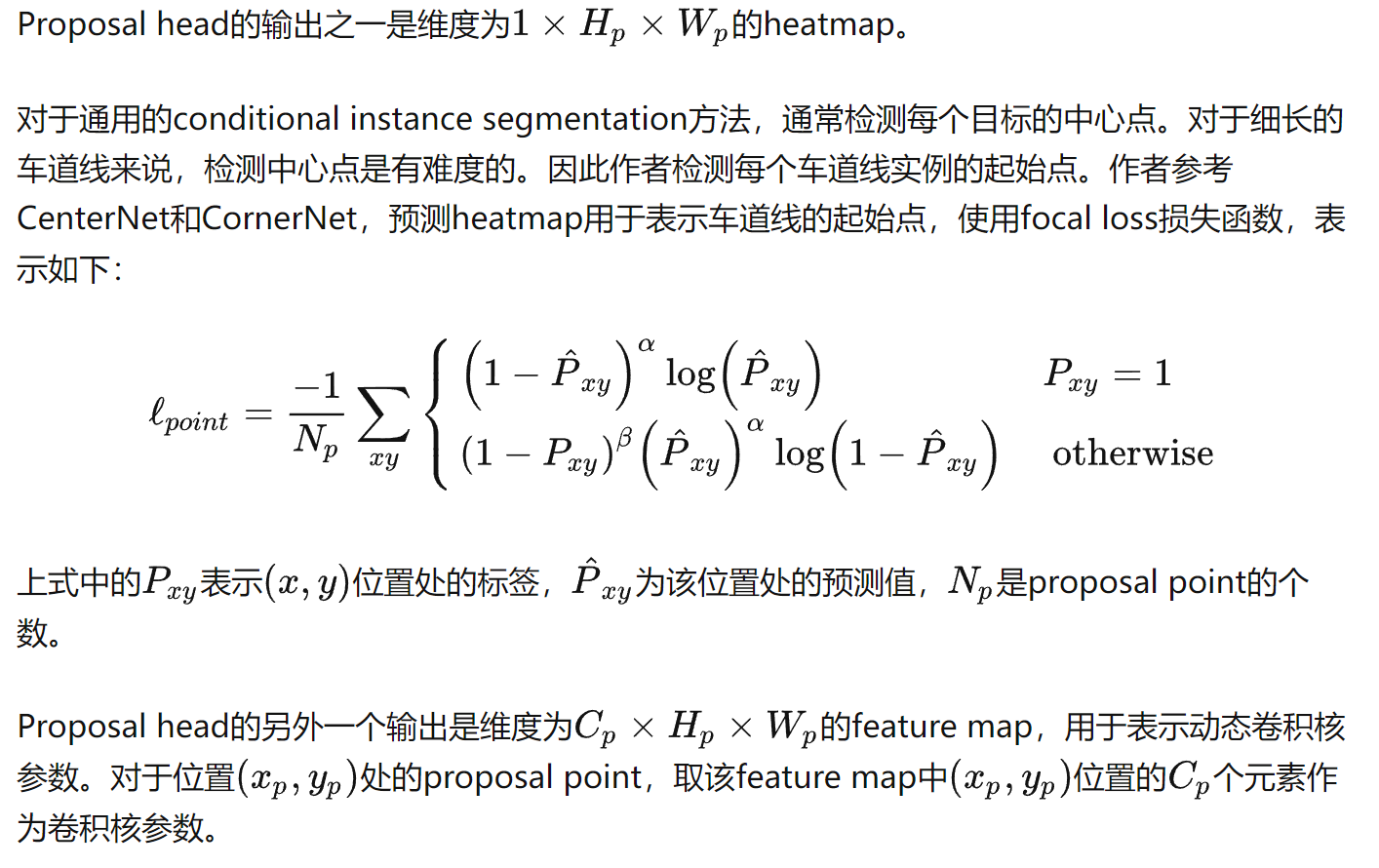
第二个部分是 Proposal Head,具体结构描述如下
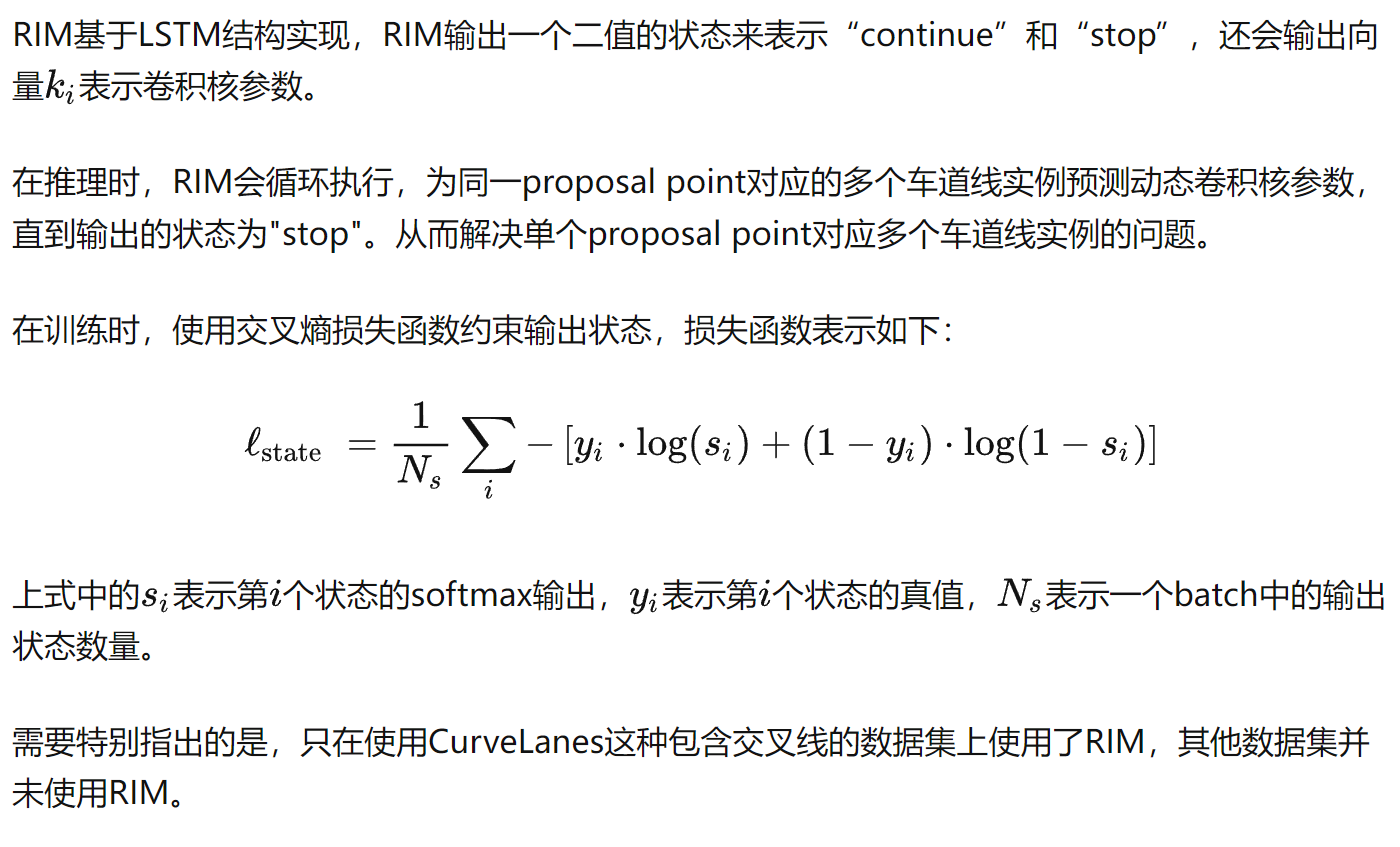
模型中存在同一proposal point对应2个车道线实例的情况,比如交叉线。作者提出了 RIM(Recurrent Instance Module) 来解决该问题。
第三个部分是 Conditional Shape Head,具体描述如下。
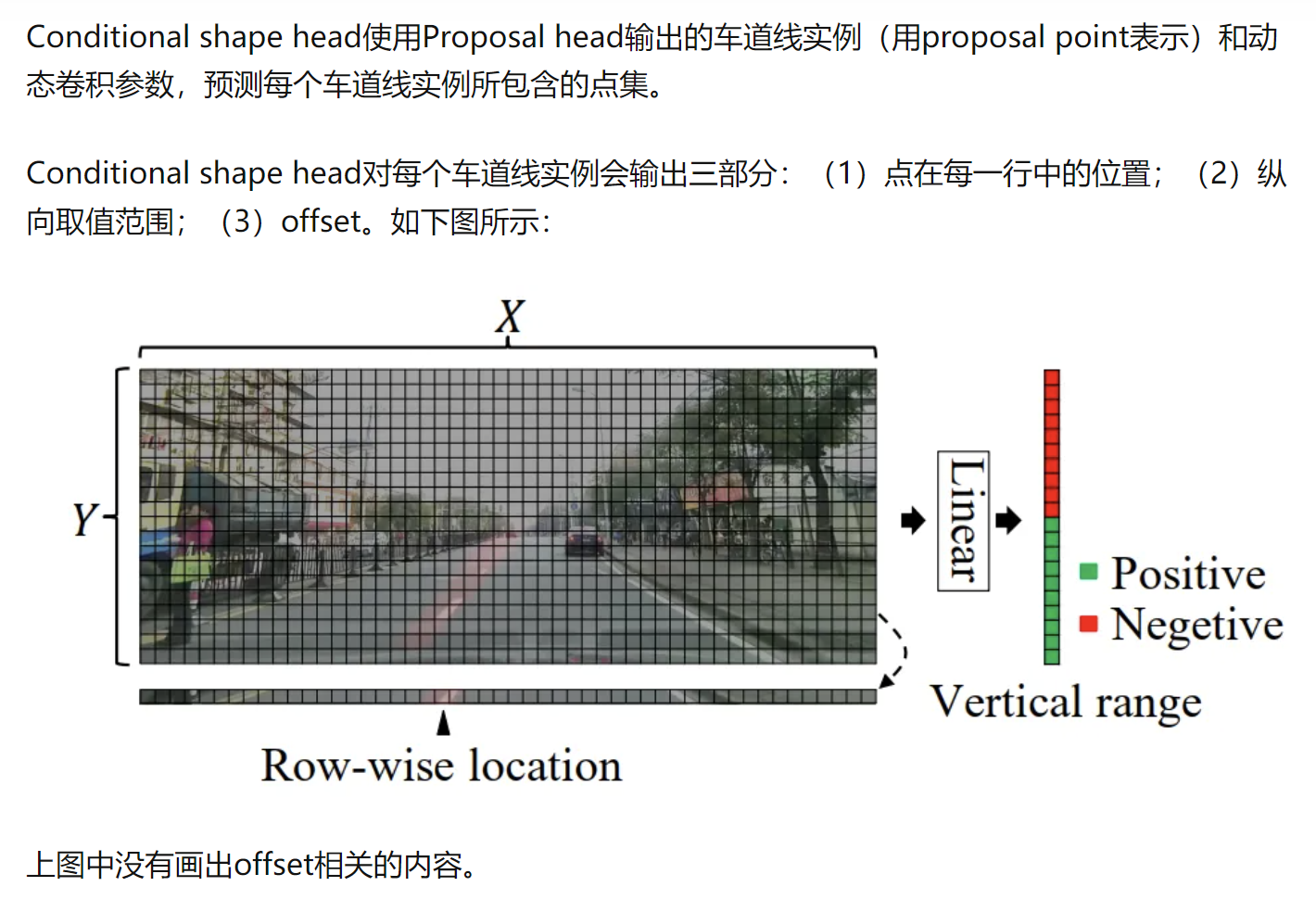
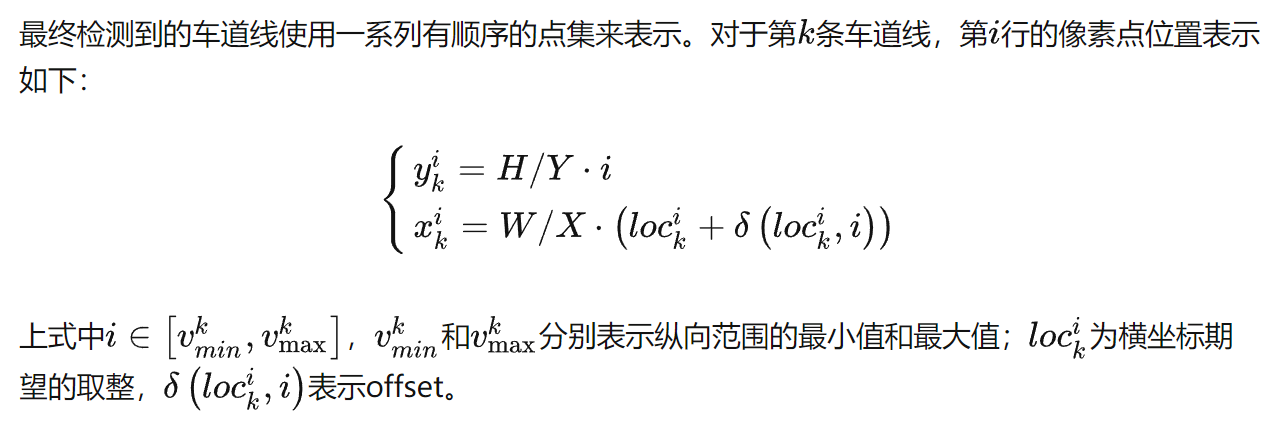
Conditional Shape Head中点在每一行位置的确定规则如下。
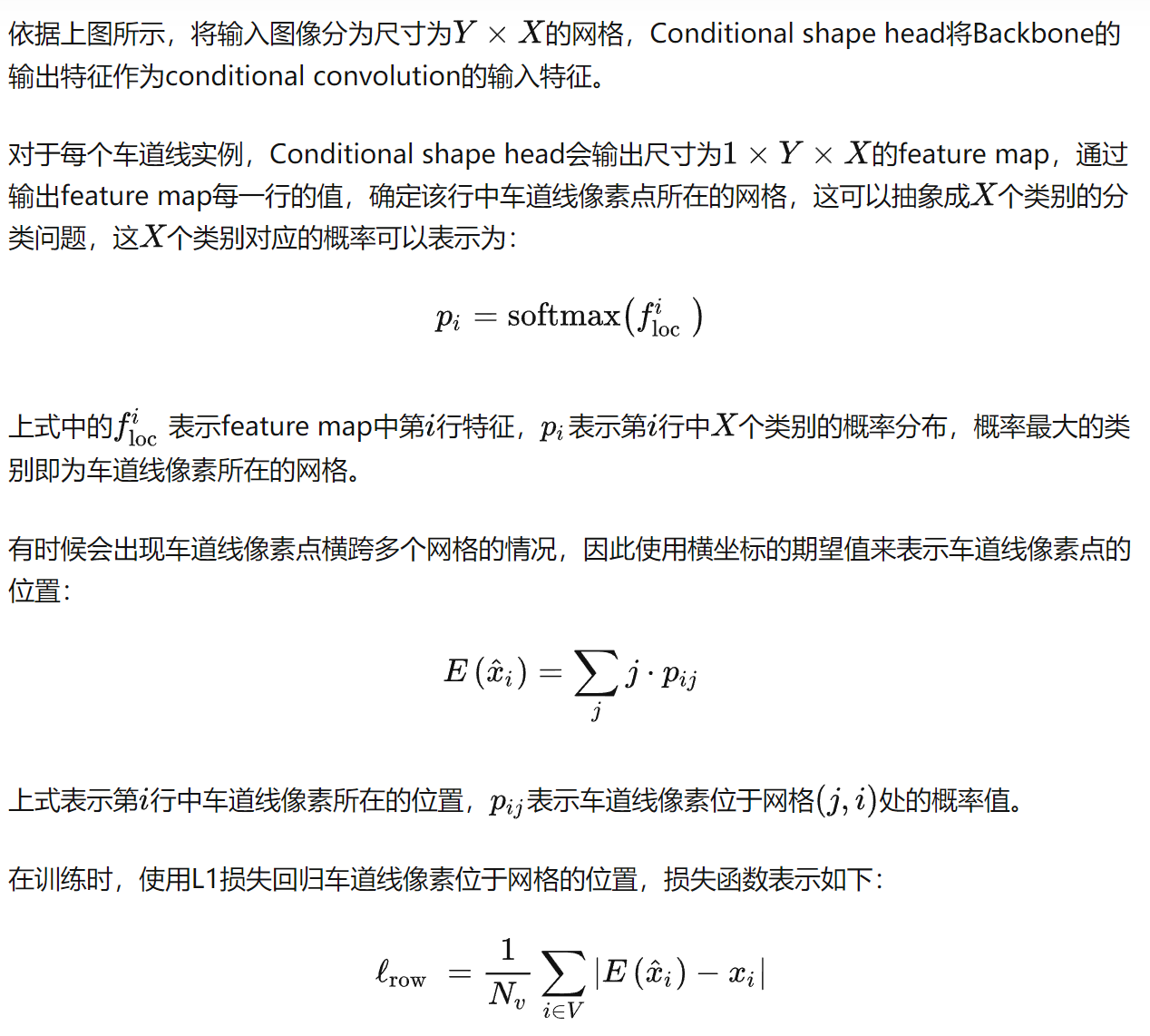
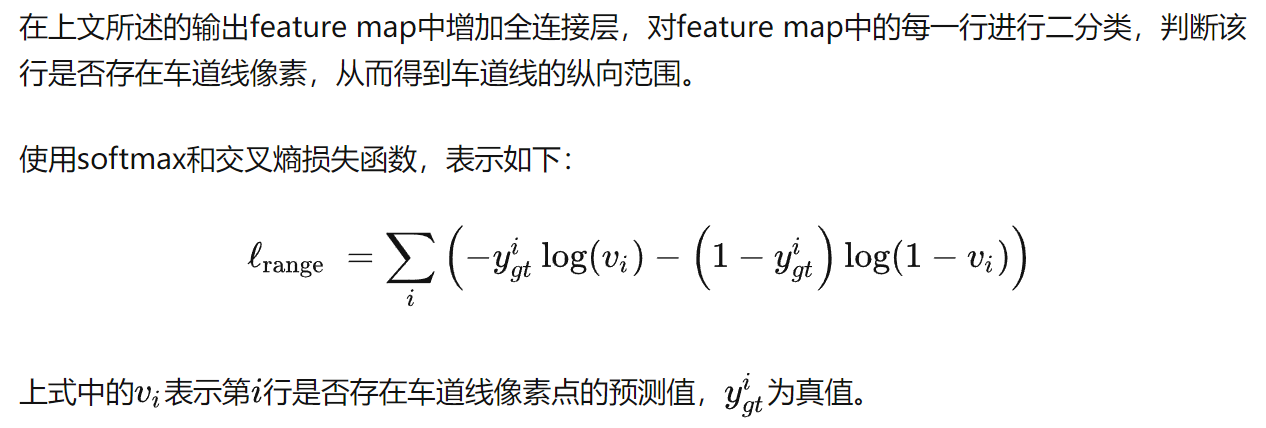
纵向范围的确定
最后便是车道线的表示,具体描述如下
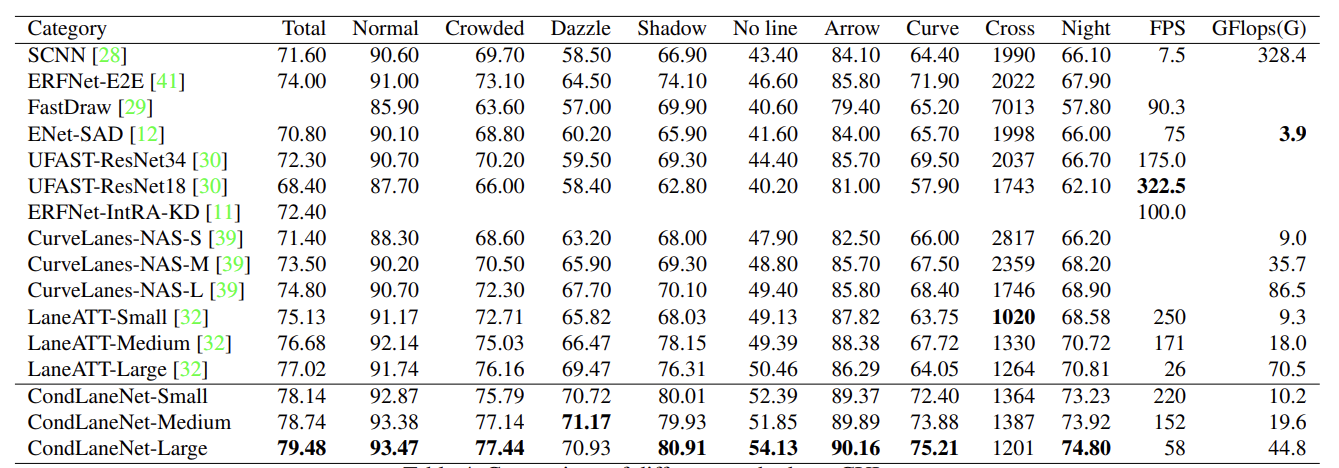
3、具体实验结果
CULane上的实验结果如下图所示。
4、关键部分 CondLaneNet head代码展示,具体代码在pplandet/model/heads/condlane.py
class CondLaneHead(nn.Layer):
def __init__(self,
heads,
in_channels,
num_classes,
head_channels=64,
head_layers=1,
reg_branch_channels = None,
disable_coords=False,
branch_in_channels=288,
branch_channels=64,
branch_out_channels=64,
branch_num_conv=1,
norm=True,
hm_idx=-1,
mask_idx=0,
compute_locations_pre=True,
location_configs=None,
mask_norm_act=True,
regression=True,
crit_loss = None,
crit_kp_loss = None,
crit_ce_loss =None,
cfg=None):
super(CondLaneHead, self).__init__()
self.cfg = cfg
self.num_classes = num_classes
self.hm_idx = hm_idx
self.mask_idx = mask_idx
self.regression = regression
if mask_norm_act:
final_norm_cfg = True
final_act_cfg = 'relu'
else:
final_norm_cfg = None
final_act_cfg = None
# mask branch
mask_branch = []
mask_branch.append(
ConvModule(
sum(in_channels),
branch_channels,
kernel_size=3,
norm=norm))
for i in range(branch_num_conv):
mask_branch.append(
ConvModule(
branch_channels,
branch_channels,
kernel_size=3,
norm=norm))
mask_branch.append(
ConvModule(
branch_channels,
branch_out_channels,
kernel_size=3,
norm=final_norm_cfg,
act=final_act_cfg))
self.add_sublayer('mask_branch', nn.Sequential(*mask_branch))
self.mask_weight_nums, self.mask_bias_nums = self.cal_num_params(
head_layers, disable_coords, head_channels, out_channels=1)
# print('mask: ', self.mask_weight_nums, self.mask_bias_nums) # 66 1
self.num_mask_params = sum(self.mask_weight_nums) + sum(
self.mask_bias_nums)
self.reg_weight_nums, self.reg_bias_nums = self.cal_num_params(
head_layers, disable_coords, head_channels, out_channels=1)
# print('reg: ', self.reg_weight_nums, self.reg_bias_nums) # 66 1
self.num_reg_params = sum(self.reg_weight_nums) + sum(
self.reg_bias_nums)
if self.regression:
self.num_gen_params = self.num_mask_params + self.num_reg_params
else:
self.num_gen_params = self.num_mask_params
self.num_reg_params = 0
self.mask_head = DynamicMaskHead(
head_layers,
branch_out_channels,
branch_out_channels,
1,
self.mask_weight_nums,
self.mask_bias_nums,
disable_coords=False,
compute_locations_pre=compute_locations_pre,
location_configs=location_configs)
if self.regression:
self.reg_head = DynamicMaskHead(
head_layers,
branch_out_channels,
branch_out_channels,
1,
self.reg_weight_nums,
self.reg_bias_nums,
disable_coords=False,
out_channels=1,
compute_locations_pre=compute_locations_pre,
location_configs=location_configs)
if 'params' not in heads:
heads['params'] = num_classes * (
self.num_mask_params + self.num_reg_params)
self.ctnet_head = CtnetHead(
heads,
channels_in=branch_in_channels,
final_kernel=1,
# head_conv=64,)
head_conv=branch_in_channels)
self.feat_width = location_configs['size'][-1]
self.mlp = MLP(self.feat_width, 64, 2, 2)
self.post_process = CondLanePostProcessor(
mask_size=self.cfg.mask_size, hm_thr=0.5, use_offset=True,
nms_thr=4)
self.loss_impl = CondLaneLoss(cfg.loss_weights,
1,
crit_loss=crit_loss,
crit_ce_loss=crit_ce_loss,
crit_kp_loss=crit_kp_loss,
cfg=cfg)
def loss(self, output, batch):
img_metas = batch.pop('img_metas')
return self.loss_impl(output, img_metas, **batch)
def cal_num_params(self,
num_layers,
disable_coords,
channels,
out_channels=1):
weight_nums, bias_nums = [], []
for l in range(num_layers):
if l == num_layers - 1:
if num_layers == 1:
weight_nums.append((channels + 2) * out_channels)
else:
weight_nums.append(channels * out_channels)
bias_nums.append(out_channels)
elif l == 0:
if not disable_coords:
weight_nums.append((channels + 2) * channels)
else:
weight_nums.append(channels * channels)
bias_nums.append(channels)
else:
weight_nums.append(channels * channels)
bias_nums.append(channels)
return weight_nums, bias_nums
def parse_gt(self, gts, device=None):
reg = (paddle.to_tensor(gts['reg'])).unsqueeze(0)
reg_mask = (paddle.to_tensor(gts['reg_mask'])).unsqueeze(0)
row = (paddle.to_tensor(
gts['row'])).unsqueeze(0).unsqueeze(0)
row_mask = (paddle.to_tensor(
gts['row_mask'])).unsqueeze(0).unsqueeze(0)
if 'range' in gts:
lane_range = paddle.to_tensor(gts['range']) # new add: squeeze
#lane_range = (gts['range']).to(device).squeeze(0) # new add: squeeze
else:
mask = None
lane_range = paddle.zeros((1, mask.shape[-2]),
dtype=paddle.int64)
return reg, reg_mask, row, row_mask, lane_range
def parse_pos(self, gt_masks, hm_shape, device, mask_shape=None):
b = len(gt_masks)
n = self.num_classes
hm_h, hm_w = hm_shape[:2]
if mask_shape is None:
mask_h, mask_w = hm_shape[:2]
else:
mask_h, mask_w = mask_shape[:2]
poses = []
regs = []
reg_masks = []
rows = []
row_masks = []
lane_ranges = []
labels = []
num_ins = []
for idx, m_img in enumerate(gt_masks):
num = 0
for m in m_img:
gts = self.parse_gt(m, device=device)
reg, reg_mask, row, row_mask, lane_range = gts
label = m['label']
num += len(m['points'])
for p in m['points']:
pos = idx * n * hm_h * hm_w + label * hm_h * hm_w + p[
1] * hm_w + p[0]
poses.append(pos)
for i in range(len(m['points'])):
labels.append(label)
regs.append(reg)
reg_masks.append(reg_mask)
rows.append(row)
row_masks.append(row_mask)
lane_ranges.append(lane_range)
if num == 0:
reg = paddle.zeros((1, 1, mask_h, mask_w))
reg_mask = paddle.zeros((1, 1, mask_h, mask_w))
row = paddle.zeros((1, 1, mask_h))
row_mask = paddle.zeros((1, 1, mask_h))
lane_range = paddle.zeros((1, mask_h),
dtype=paddle.int64)
label = 0
pos = idx * n * hm_h * hm_w + random.randint(
0, n * hm_h * hm_w - 1)
num = 1
labels.append(label)
poses.append(pos)
regs.append(reg)
reg_masks.append(reg_mask)
rows.append(row)
row_masks.append(row_mask)
lane_ranges.append(lane_range)
num_ins.append(num)
if len(regs) > 0:
regs = paddle.concat(regs, 1)
reg_masks = paddle.concat(reg_masks, 1)
rows = paddle.concat(rows, 1)
row_masks = paddle.concat(row_masks, 1)
lane_ranges = paddle.concat(lane_ranges, 0)
gts = dict(
gt_reg=regs,
gt_reg_mask=reg_masks,
gt_rows=rows,
gt_row_masks=row_masks,
gt_ranges=lane_ranges)
return poses, labels, num_ins, gts
def ctdet_decode(self, heat, thr=0.1):
heat = heat.unsqueeze(0)
def _nms(heat, kernel=3):
pad = (kernel - 1) // 2
hmax = nn.functional.max_pool2d(
heat, (kernel, kernel), stride=1, padding=pad)
keep = (hmax == heat).astype('float')
return heat * keep
def _format(heat, inds):
ret = []
for y, x, c in zip(inds[0], inds[1], inds[2]):
id_class = c + 1
coord = [x, y]
score = heat[y, x, c]
ret.append({
'coord': coord,
'id_class': id_class,
'score': score
})
return ret
heat_nms = _nms(heat)
heat_nms = heat_nms.squeeze(0)
# print(heat.shape, heat_nms.shape)
heat_nms = heat_nms.transpose((1, 2, 0)).detach().cpu().numpy()
inds = np.where(heat_nms > thr)
seeds = _format(heat_nms, inds)
# heat_nms = heat_nms.permute(0, 2, 3, 1).detach().cpu().numpy()
# inds = np.where(heat_nms > thr)
# print(len(inds))
# seeds = _format(heat_nms, inds)
return seeds
def forward_train(self, output, batch):
img_metas = batch['img_metas']
img_metas = img_metas._data[0]
gt_batch_masks = [m['gt_masks'] for m in img_metas]
hm_shape = img_metas[0]['hm_shape']
mask_shape = img_metas[0]['mask_shape']
inputs = output
pos, labels, num_ins, gts = self.parse_pos(
gt_batch_masks, hm_shape, inputs[0], mask_shape=mask_shape)
batch.update(gts)
x_list = list(inputs)
f_hm = x_list[self.hm_idx]
f_mask = x_list[self.mask_idx]
m_batchsize = f_hm.shape[0]
# f_mask
z = self.ctnet_head(f_hm)
hm, params = z['hm'], z['params']
h_hm, w_hm = hm.shape[2:]
h_mask, w_mask = f_mask.shape[2:]
params = params.reshape((m_batchsize, self.num_classes, -1, h_hm, w_hm))
mask_branch = self.mask_branch(f_mask)
reg_branch = mask_branch
# reg_branch = self.reg_branch(f_mask)
params = params.transpose((0, 1, 3, 4,
2)).reshape((-1, self.num_gen_params))
pos_tensor = paddle.to_tensor(np.array(pos, dtype=np.float64)).astype('int64').unsqueeze(1)
pos_tensor = pos_tensor.expand((-1, self.num_gen_params))
mask_pos_tensor = pos_tensor[:, :self.num_mask_params]
reg_pos_tensor = pos_tensor[:, self.num_mask_params:]
if pos_tensor.shape[0] == 0:
masks = None
feat_range = None
else:
mask_params = params[:, :self.num_mask_params].take_along_axis(
mask_pos_tensor,0)
masks = self.mask_head(mask_branch, mask_params, num_ins)
if self.regression:
reg_params = params[:, self.num_mask_params:].take_along_axis(
reg_pos_tensor,0)
regs = self.reg_head(reg_branch, reg_params, num_ins)
else:
regs = masks
# regs = regs.view(sum(num_ins), 1, h_mask, w_mask)
feat_range = masks.transpose((0, 1, 3,
2)).reshape((sum(num_ins), w_mask, h_mask))
feat_range = self.mlp(feat_range)
batch.update(dict(mask_branch=mask_branch, reg_branch=reg_branch))
return hm, regs, masks, feat_range, [mask_branch, reg_branch]
def forward_test(
self,
inputs,
hack_seeds=None,
hm_thr=0.5,
):
def parse_pos(seeds, batchsize, num_classes, h, w):
pos_list = [[p['coord'], p['id_class'] - 1] for p in seeds]
poses = []
for p in pos_list:
[c, r], label = p
pos = label * h * w + r * w + c
poses.append(pos)
poses = paddle.to_tensor(np.array(
poses, np.long)).astype('int64').unsqueeze(1)
return poses
# with Timer("Elapsed time in stage1: %f"): # ignore
x_list = list(inputs)
f_hm = x_list[self.hm_idx]
f_mask = x_list[self.mask_idx]
m_batchsize = f_hm.shape[0]
f_deep = f_mask
m_batchsize = f_deep.shape[0]
# with Timer("Elapsed time in ctnet_head: %f"): # 0.3ms
z = self.ctnet_head(f_hm)
h_hm, w_hm = f_hm.shape[2:]
h_mask, w_mask = f_mask.shape[2:]
hms, params = z['hm'], z['params']
hms = paddle.clip(F.sigmoid(hms), min=1e-4, max=1 - 1e-4)
params = params.reshape((m_batchsize, self.num_classes, -1, h_hm, w_hm))
# with Timer("Elapsed time in two branch: %f"): # 0.6ms
mask_branchs = self.mask_branch(f_mask)
reg_branchs = mask_branchs
# reg_branch = self.reg_branch(f_mask)
params = params.transpose((0, 1, 3, 4,
2)).reshape((m_batchsize, -1, self.num_gen_params))
batch_size, num_classes, h, w = hms.shape
# with Timer("Elapsed time in ct decode: %f"): # 0.2ms
out_seeds, out_hm = [], []
idx = 0
for hm, param, mask_branch, reg_branch in zip(hms, params, mask_branchs, reg_branchs):
mask_branch = mask_branch.unsqueeze(0)
reg_branch = reg_branch.unsqueeze(0)
seeds = self.ctdet_decode(hm, thr=hm_thr)
if hack_seeds is not None:
seeds = hack_seeds
# with Timer("Elapsed time in stage2: %f"): # 0.08ms
pos_tensor = parse_pos(seeds, batch_size, num_classes, h, w)
pos_tensor = pos_tensor.expand((-1, self.num_gen_params))
num_ins = [pos_tensor.shape[0]]
mask_pos_tensor = pos_tensor[:, :self.num_mask_params]
if self.regression:
reg_pos_tensor = pos_tensor[:, self.num_mask_params:]
# with Timer("Elapsed time in stage3: %f"): # 0.8ms
if pos_tensor.shape[0] == 0:
seeds = []
else:
mask_params = param[:, :self.num_mask_params].take_along_axis(
mask_pos_tensor,0)
# with Timer("Elapsed time in mask_head: %f"): #0.3ms
masks = self.mask_head(mask_branch, mask_params, num_ins, idx)
if self.regression:
reg_params = param[:, self.num_mask_params:].take_along_axis(
reg_pos_tensor,0)
# with Timer("Elapsed time in reg_head: %f"): # 0.25ms
regs = self.reg_head(reg_branch, reg_params, num_ins, idx)
else:
regs = masks
feat_range = masks.transpose((0, 1, 3,
2)).reshape((sum(num_ins), w_mask, h_mask))
feat_range = self.mlp(feat_range)
for i in range(len(seeds)):
seeds[i]['reg'] = regs[0, i:i + 1, :, :]
m = masks[0, i:i + 1, :, :]
seeds[i]['mask'] = m
seeds[i]['range'] = feat_range[i:i + 1]
out_seeds.append(seeds)
out_hm.append(hm)
idx+=1
output = {'seeds': out_seeds, 'hm': out_hm}
return output
def forward(
self,
x_list,
**kwargs):
if self.training:
return self.forward_train(x_list, kwargs['batch'])
return self.forward_test(x_list, )
def get_lanes(self, output):
out_seeds, out_hm = output['seeds'], output['hm']
ret = []
for seeds, hm in zip(out_seeds, out_hm):
lanes, seed = self.post_process(seeds, self.cfg.mask_down_scale)
result = adjust_result(
lanes=lanes,
crop_bbox=self.cfg.crop_bbox,
img_shape=(self.cfg.img_height, self.cfg.img_width),
tgt_shape=(self.cfg.ori_img_h, self.cfg.ori_img_w),
)
lanes = []
for lane in result:
coord = []
for x, y in lane:
coord.append([x, y])
coord = np.array(coord)
coord[:, 0] /= self.cfg.ori_img_w
coord[:, 1] /= self.cfg.ori_img_h
lanes.append(Lane(coord))
ret.append(lanes)
return ret
def init_weights(self):
# ctnet_head will init weights during building
pass
5、具体代码复现
#clone PPLanedet
!git clone https://github.com/zkyseu/PPlanedet
#解压数据集
!tar -zxvf /home/aistudio/data/data88752/list.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/list.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_23_30frame_part2.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_23_30frame_part2.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_100_30frame.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_100_30frame.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_193_90frame.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_193_90frame.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_23_30frame_part1.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_23_30frame_part1.tar.gz
!tar -zxvf /home/aistudio/data/data88752/laneseg_label_w16.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/laneseg_label_w16.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_161_90frame.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_161_90frame.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_37_30frame.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_37_30frame.tar.gz
!tar -zxvf /home/aistudio/data/data88752/driver_182_30frame.tar.gz -C /home/aistudio/data
!rm -rf /home/aistudio/data/data88752/driver_182_30frame.tar.gz
%cd PPlanedet
/home/aistudio/PPlanedet
#安装必要的库
!pip install -r requirements.txt --user
#开启训练
python tools/train.py -c configs/condlane/resnet50_culane.py
6、复现精度
CondLaneNet在CULane上复现精度为79.69%,超越论文中的精度,大家可以运行下面代码体验一下
!wget https://github.com/zkyseu/PPlanedet/releases/download/CondLaneNewt/model.pd #下载预训练权重
训练权重
python tools/train.py -c configs/condlane/resnet50_culane.py --load model.pd --evaluate-only #如果报错请确认模型权重位置是否正确。
7、总结
作者借鉴了分割领域中的conditional instance segmentation策略,提出了CondLaneNet算法用于车道线检测任务,来应对车道线实例检测、交叉线的挑战。
CondLaneNet中包含Proposal head和Conditional shape head,其中Proposal head用于预测车道线实例和实例级别的卷积核动态参数,Conditional shape head用于预测每个车道线实例的形状信息。CondLaneNet能够很好地解决车道线实例分割、交叉线检测问题,并且有很好的实时性。
参考文献
请点击此处查看本环境基本用法.
Please click here for more detailed instructions.

















 3758
3758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









