







CondLaneNet: a Top-to-down Lane Detection Framework Based on Conditional Convolutionc
code
论文结构说明:
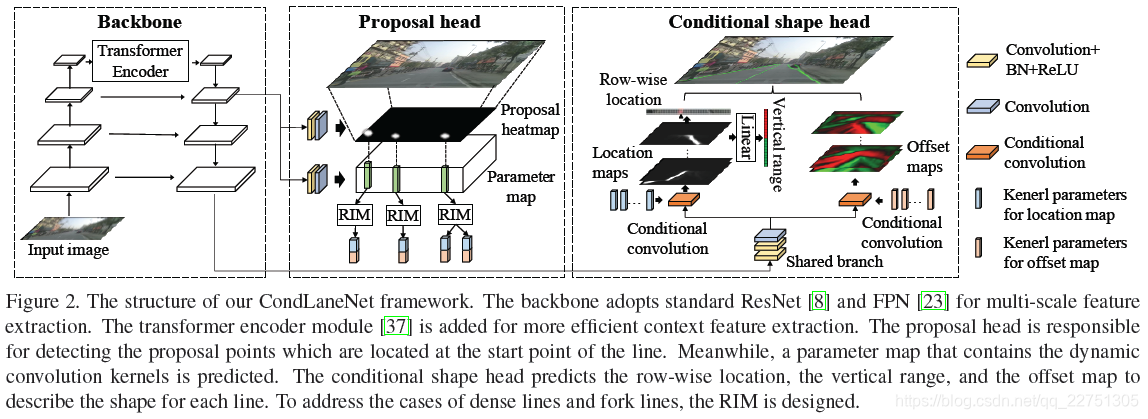
- 用resnet作为主干网络,加入了标准的FPN作为nect;
- 由于车道线比较细长,作者在resnet输出的最小特征图上,加入了transformer,用于捕捉车道线的关联信息;
- 在Proposal head部分,与SOLOv2类似,将图片划分为若干个格子(令格子数为Hp * Wp),输出2个特征图,一个为heatmap(shape 1 * Hp * Wp),表示每个格子是否存在车道线实例。另一个输出为parameter map(shape 为 Cp * Hp * Wp),与heatmap一一对应,输出格子中车道线实例对应的一组卷积参数,在Conditional shape head中做卷积操作,计算该格子对应的车道线信息;
- Conditional shape head,首先,在shared branch的特征图上,利用前面计算的卷积参数,计算location maps和offset maps;
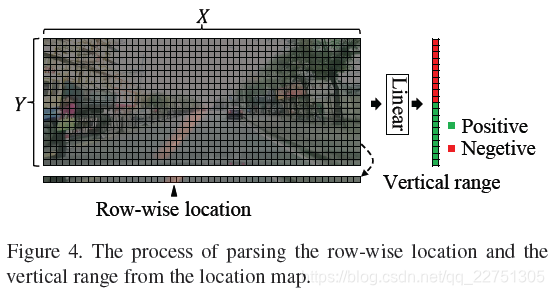
- location maps为单通道的特征图,对于每行数据,先做softmax,再根据softmax的输出与列坐标加权求和,得到该行的车道线位置loc;同时,对每行数据用一个全连接层预测车道线是否穿越该行;如Figure 4所示。
- 由于loc计算的不够精准,故offset maps在水平方向上预测一个offset值。
实验


















 2011
2011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









