







原文地址:CondLaneNet: a Top-to-down Lane Detection Framework Based on Conditional Convolution
Introduction
为了解决complet topologies. 提出了一个top-to-down的框架,先找出大致实例,再预测line shape(对应起来的bottom-to-up方法我理解就是先像素级分类,然后再经过后处理例如聚类等生成一个实例)
基于conditional convolution 和 row-wise formulation。构造了一个Recurrent Instance Module模块克服复杂拓扑结构的实例。
大部分分割方法还是bottom-up的,因此分配实例是一个比较困难的地方,如果直接分类,也可以,不过lanes number是fixed的,显然不够鲁棒(ultra fast)。post-clustering的方法会在dense lines的情况下出现效果下滑。anchor-based方法,lane shape是先验的,有一定限制
How
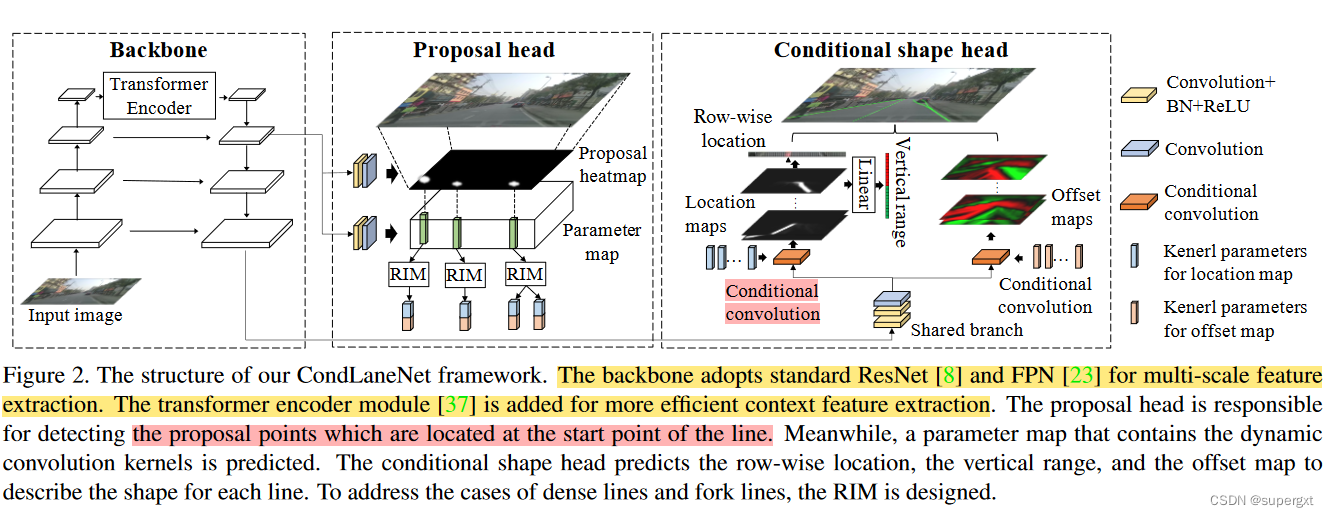
首先引入动态卷积——一种结合动态核参数的卷积操作。动态卷积包含两步:实例检测和实例shape prediction。实例检测首先找到object instance然后回归一组核参,第二步根据每个实例的核参预测shape。不过作者没有直接把动态卷积处理实例分割的方法照搬(用分割方法做shape description,也没有用原始的检测方法。具体原因就是线的自由度比较高,线的视觉特征不明显。)
shape prediction
作者首先介绍了shape prediction部分,也就是上图的最右。作者采用row-wise formulation而不是分割的方法
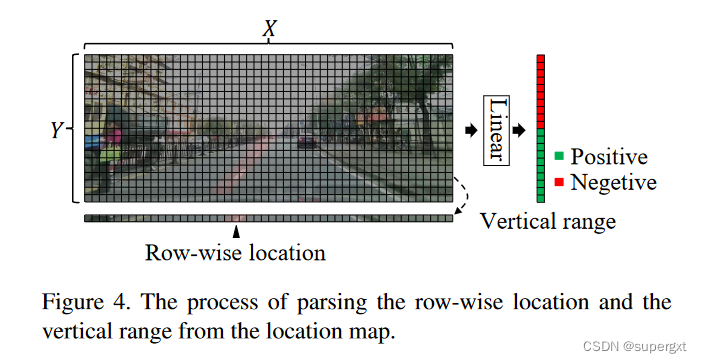
Row-wise location
将输入特征图分为小box,然后输出一张location map。对每一行上进行X个分类,在推理阶段,对location map每一行上进行softmax,作为是line中一个点的概率。进一步细化具体位置,最终的位置是 E ( x ^ i ) = ∑ j × p i j E(\hat{x}_i) = \sum j\times p_{ij} E(x^i)=∑j×pij, 表示第i行的坐标点由每一个cell的横坐标乘它的概率。这部分的损失是:
L r o w = 1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5320
5320











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









