







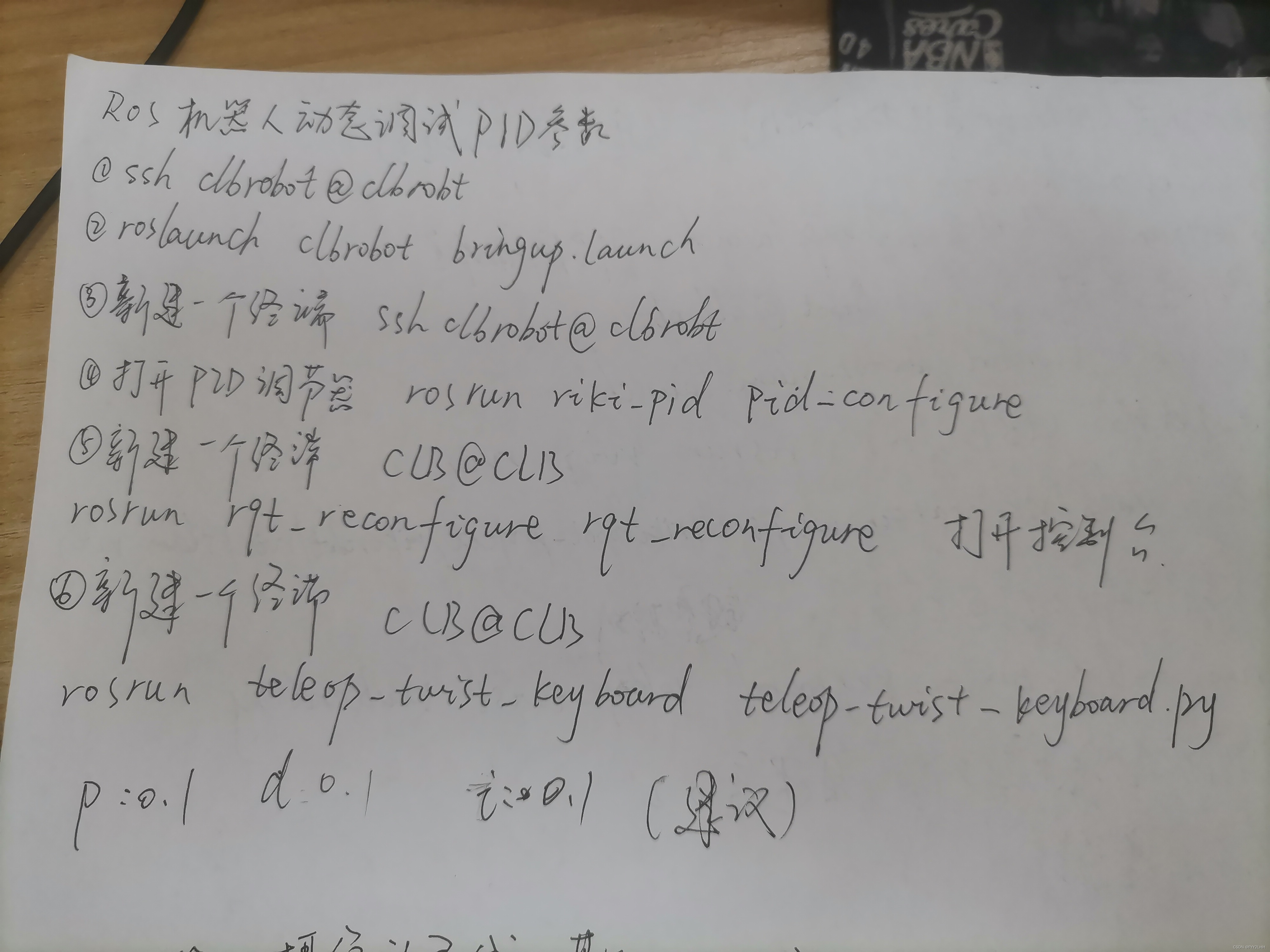
1、打开终端,连接树莓派
ssh clbrobot@clbrobt2、打开底盘节点
roslaunch clbrobot bringup.launch3、再打开一个终端
ssh clbrobot@clbrobt4、打开PID调节器
rosrun riki_pid pid_configure5、虚拟机终端打开,打开一个新终端(CLB@CLB),打开控制台
rosrun rqt_reconfigure rqt_reconfigure6、新建一个终端(CLB@CLB)
rosrun teleop_twist_keyboard teleop_twist_keyboard.py建议 P:0.1 I:0.1 D:0.1
















 280
280











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











