






使用速腾激光雷达时,总会遇到这样的问题,即明明已经在PC端和Ubuntu端修改了静态ip,并且使用抓包工具已经看到PC端已经接通激光雷达,但是Ubuntu端却总出现题目所示的问题。
0补充的小知识
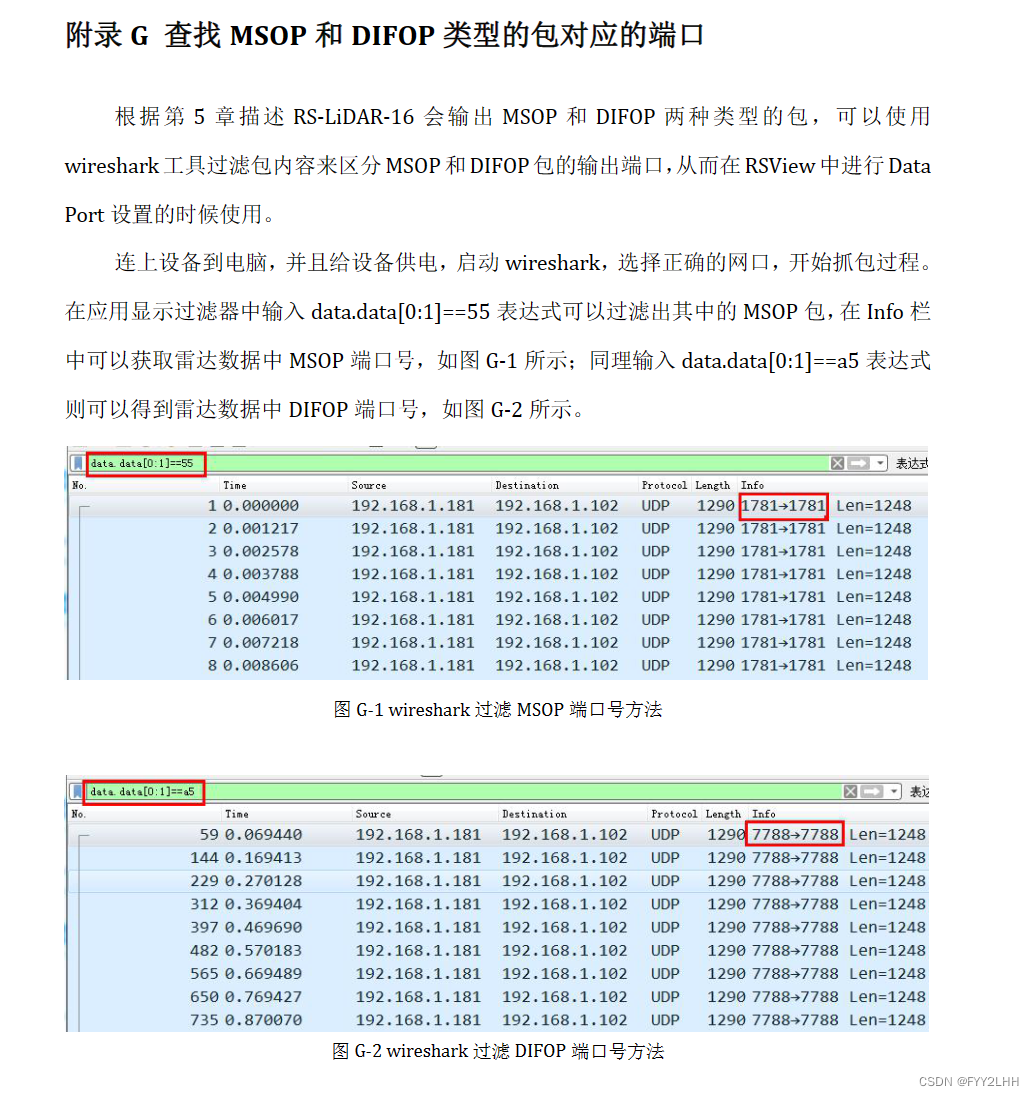
可以根据上面的内容修改launch文件中的端口号
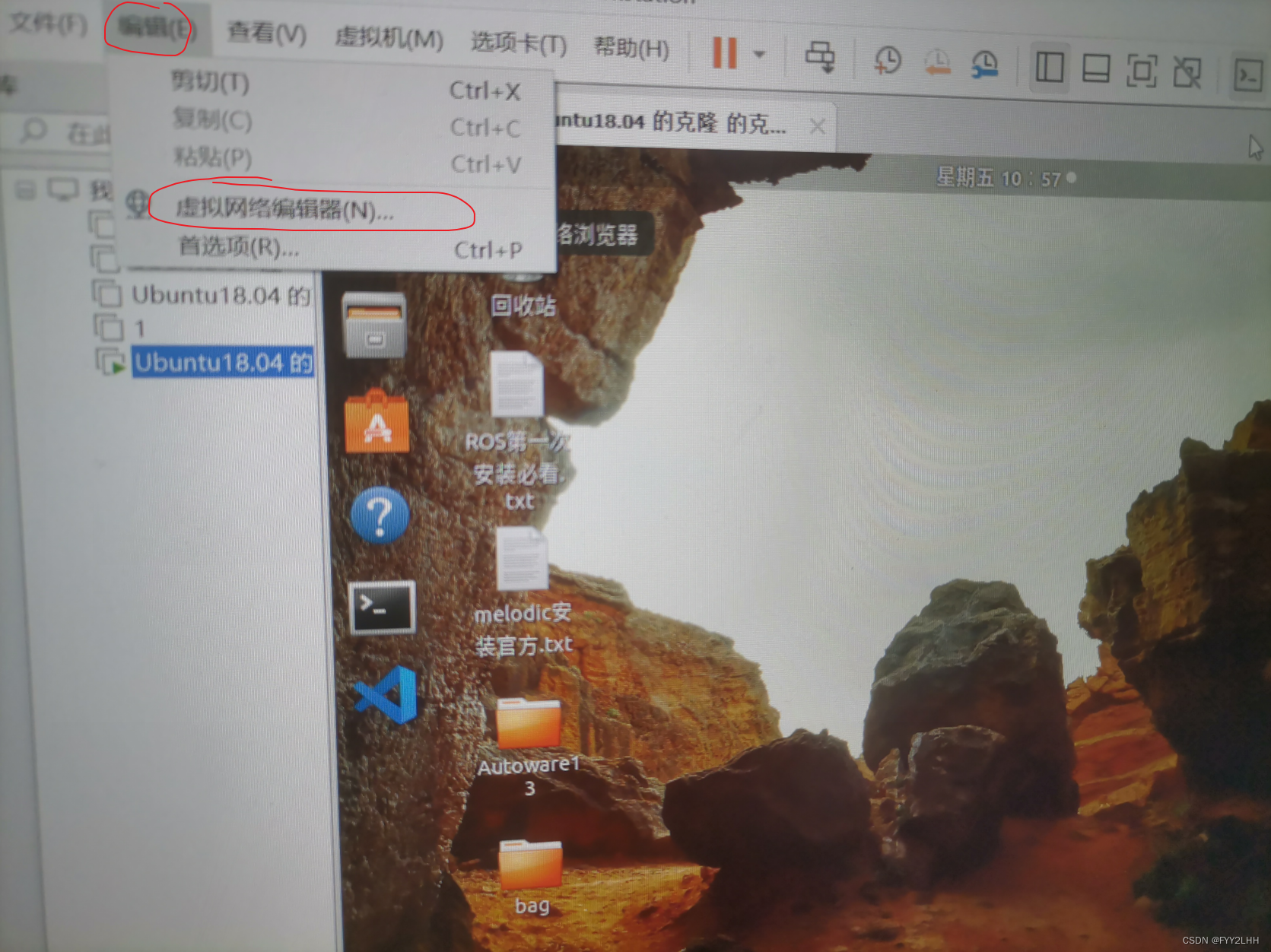
1激光雷达不能ping通问题的解决(由于更改太多的ip,我选择还原设置,重新配置ip之后成功了)
Ubuntu左上方编辑-虚拟网络编辑器-还原默认设置
 2
2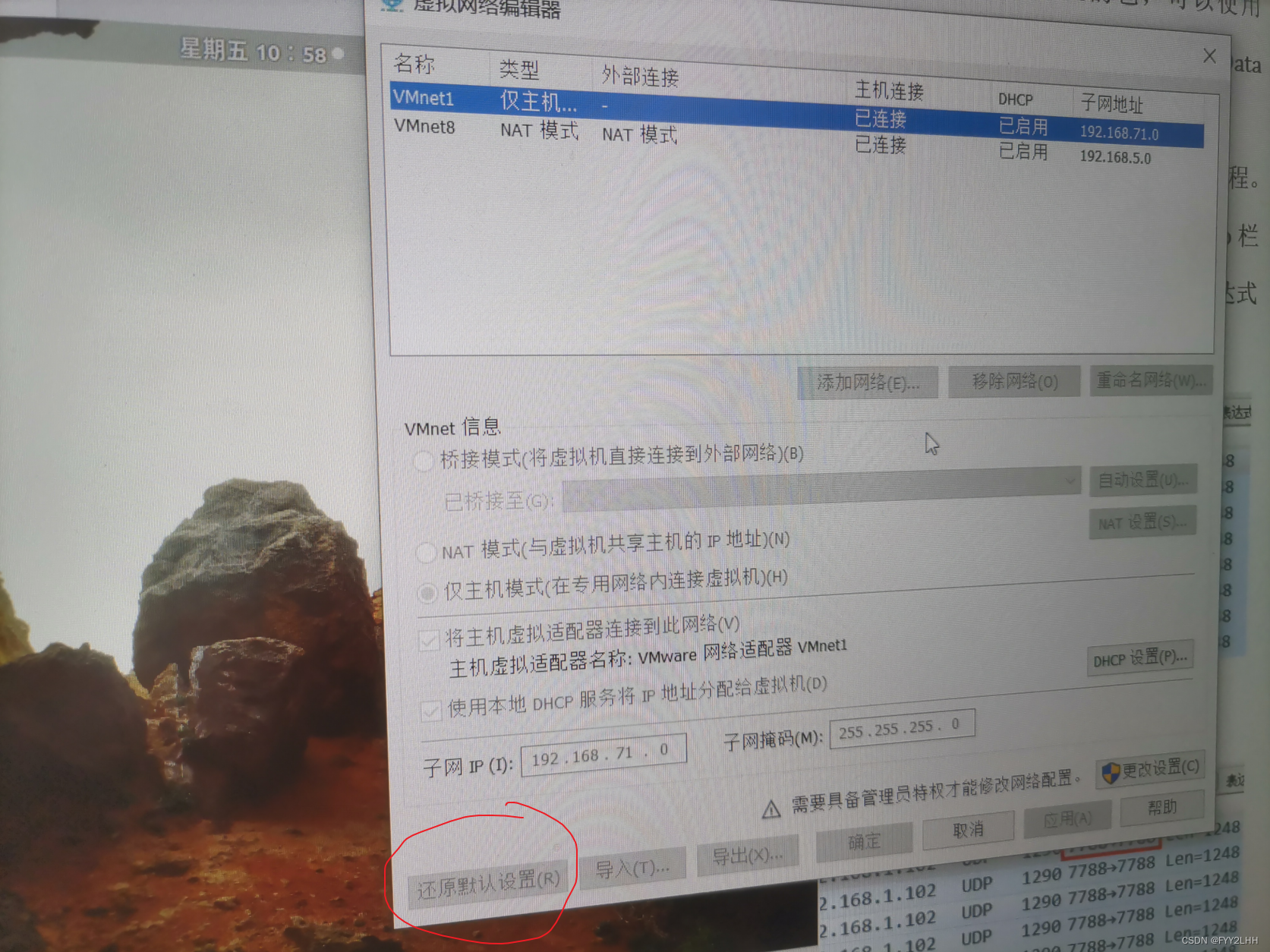
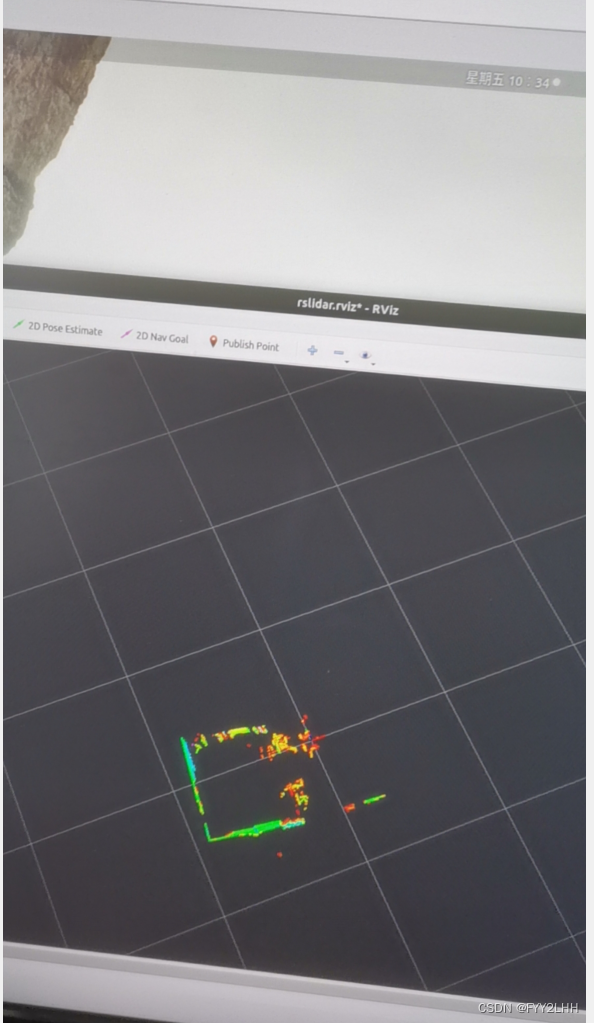
2rslidar pull()timeout问题的解决
搞了好久都没有解决,有可能是防火墙未关闭的原因,但是关闭防火墙之后仍然出现这样的问题,于是从起点找问题,摸了一下激光雷达,明显没有启动的感觉,感觉不到内部在旋转,也没有任何声音,决定拔掉之后重新启动,然后重新连接,接着激光雷达就能在Ubuntu中显示了。


















 1132
1132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











