






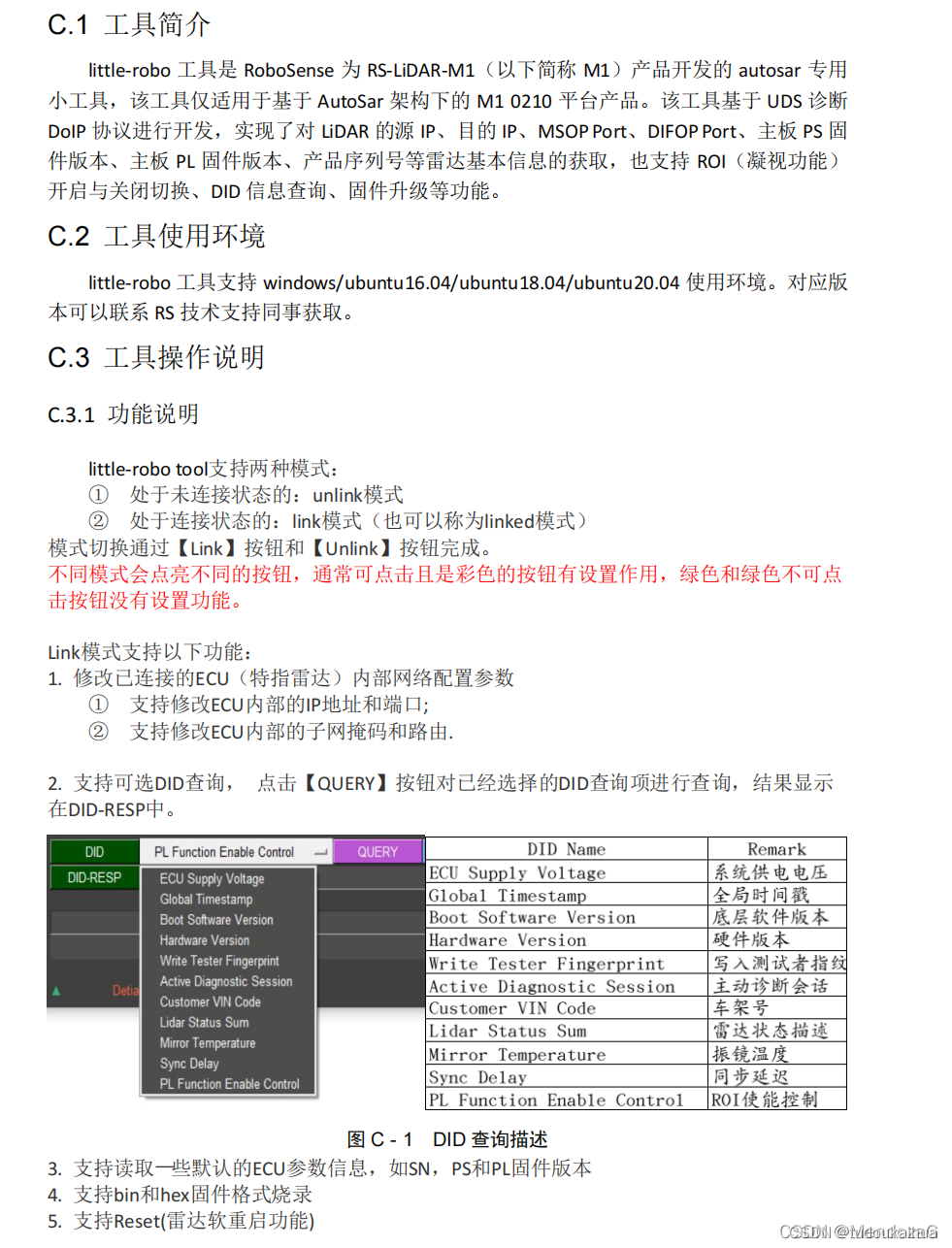
 打开little-robo,选择project中的M0210
打开little-robo,选择project中的M0210
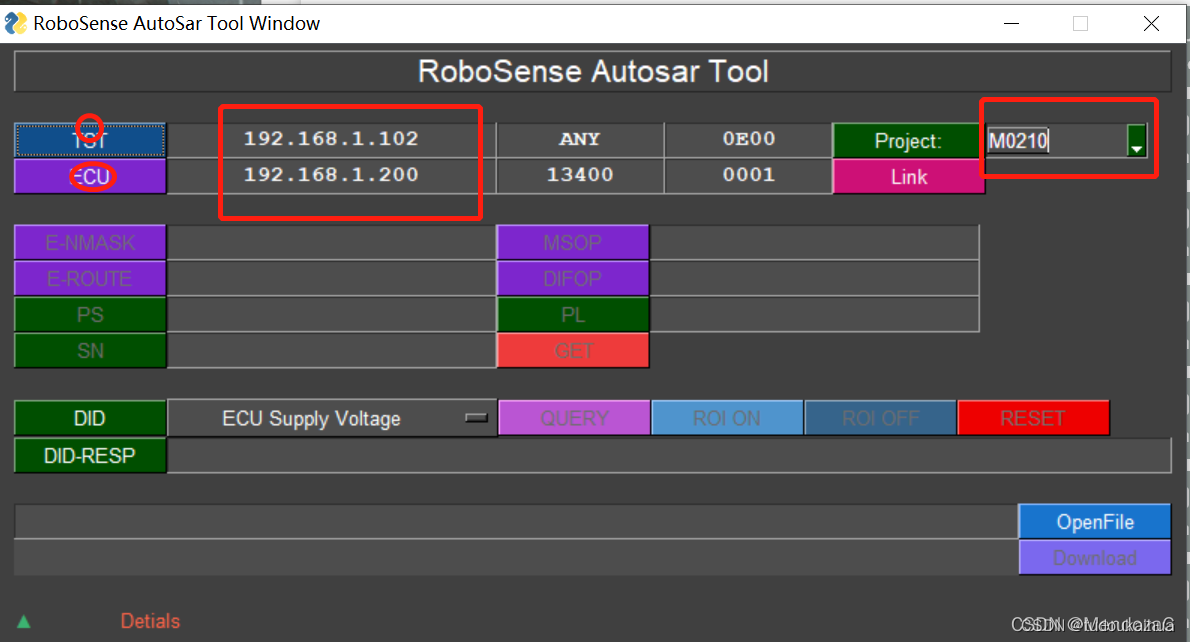 左边两个是默认的主机IP和激光雷达IP,目前是未连接状态。把主机IP调整为192.168.1.102,打开wireshark,查看是否正常接受(若之前不是默认值,则可以在wireshark中查看broadcast找到两个的IP),连接上后我们点击link可以获取到设备的信息:
左边两个是默认的主机IP和激光雷达IP,目前是未连接状态。把主机IP调整为192.168.1.102,打开wireshark,查看是否正常接受(若之前不是默认值,则可以在wireshark中查看broadcast找到两个的IP),连接上后我们点击link可以获取到设备的信息:
更改需要的设备ip和主机ip点击TST和ECU;更改需要的发送端口点击MSOP和DIFOP等待相应后拔掉电源重新上电即可使用。

打开little-robo,选择project中的M0210
左边两个是默认的主机IP和激光雷达IP,目前是未连接状态。把主机IP调整为192.168.1.102,打开wireshark,查看是否正常接受(若之前不是默认值,则可以在wireshark中查看broadcast找到两个的IP),连接上后我们点击link可以获取到设备的信息:
更改需要的设备ip和主机ip点击TST和ECU;更改需要的发送端口点击MSOP和DIFOP等待相应后拔掉电源重新上电即可使用。
 2129
5187
2129
5187

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























