








目录
农业机器人的进步为改变水果收获实践带来了巨大的希望,特别是在苹果行业。水果的准确检 测和定位是成功实施机器人收获系统的关键。在本文中,我们提出了一种利用目标检测模型YOLOv5 进行苹果检测和位置估计的新方法。我们的主要目标是开发一个鲁棒的系统,能够在复杂的果园环境 中识别苹果,并提供精确的位置信息。为了实现这一目标,我们策划了一个自主标记的数据集,其中 包含不同的苹果树图像,用于训练和评估目的。通过严格的实验,我们将基于yolov5的系统的性能与 其他流行的对象检测模型(包括SSD)进行了比较。我们的研究结果表明,YOLOv5模型优于同类模型, 实现了令人印象深刻的苹果检测准确率,约为85%。我们相信,我们提出的系统准确的苹果检测和位 置估计能力代表了农业机器人的重大进步,为更高效和可持续的水果收获实践奠定了基础。
1. 介绍
人工智能(AI)的快速发展带动了农业领域前沿技术的发展,如精准农业、智慧农业等。农业计算 机视觉技术使农民能够有效地监测作物并提高产量,使现代农业发生了革命性的变化。然而,在 为收获机器人创建准确和高效的水果检测系统方面仍然存在重大挑战,包括遮挡、不同的光照条 件以及实时性能的必要性等问题。之前的研究调查了传统的图像处理和深度学习方法;然而,这些 方法仍然不能完全满足实际工作环境中采摘机器人的需求。此外,农业收获不仅需要识别作物, 还需要确定作物分布和中心坐标。为了增强收获机器人的效能,需要适当的模型和数学方法来计 算作物的分布及其中心坐标。YOLO v5是一种先进的目标检测算法[1],它在图像识别方面表现出 了卓越的性能,能够精确地定位带有边界框的目标,为这些挑战提供了一个有希望的解决方案。
2. 探索YOLOv5的内部工作原理
2.1. 模型概述
YOLOv5是一个目标检测模型,也是YOLO[2] (You Only Look Once)系列的最新迭代。 它由Ultralytics团队开发,建立在YOLOv4架构的基础上,进行了改进和优化,提供更高的检 测精度和更快的推理速度。 以下是YOLOv5目标检测算法的几个显著特点和改进:
(1)轻量化模型:YOLOv5在轻量化的同时实现了高精度,通过模型优化和剪枝,可以在嵌入 式设备和移动平台上实现实时检测。
(ii)改进的骨干网络:YOLOv5采用了一种新的骨干网络[3],称为CSPDarknet53,在性能和速 度方面优于YOLOv4中使用的Darknet53。
(iii)数据增强和训练技术:YOLOv5采用高效的数据增强技术,如马赛克数据增强[4]和多尺度 训练[5],增强模型的泛化和鲁棒性。
(iv)模型自动优化:YOLOv5引入模型自动优化技术,自动调整模型架构和超参数,进一步提 高模型性能。
2.2. 模型结构
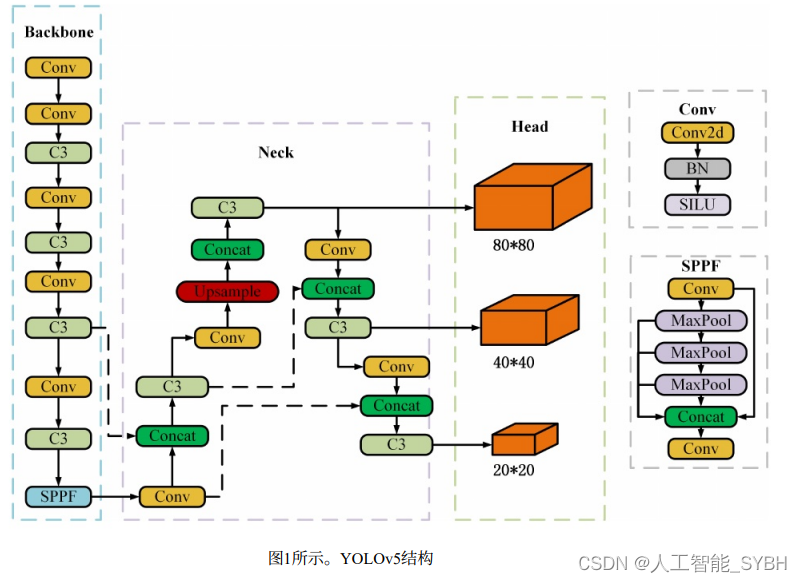
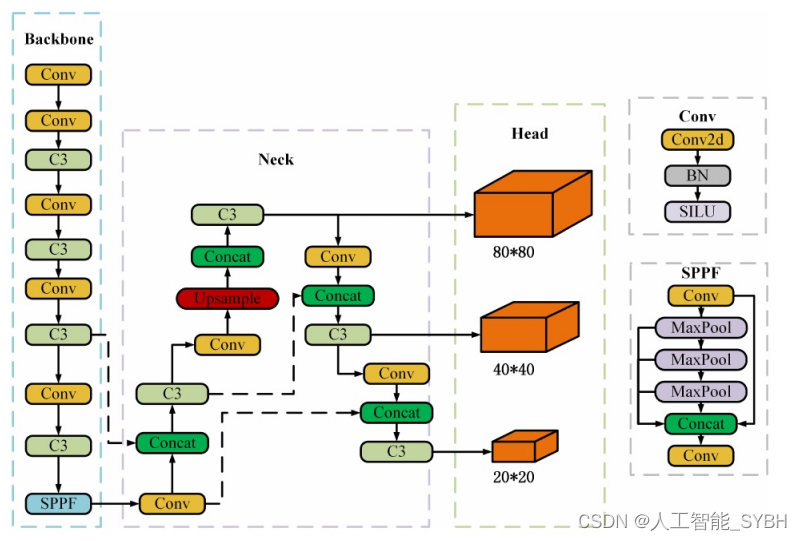
图1说明了YOLOv5对象检测模型的基本体系结构。整个模型可以分为三个主要部分:骨 干网络、颈部网络和检测头。
骨干网络通常由卷积层(Conv)和残差块(C3)[6]组成,用于提取图像特征。特征在主干网 络中被逐层提取和融合。 颈部部分利用特征金字塔网络(feature pyramid network, FPN)结构,通过上采样和拼接操 作将不同层次的特征结合起来,形成具有丰富语义信息的特征图。 检测头部部分包括一系列的卷积层和特征融合操作。它最终输出三个不同尺度的特征图 (80x80、40x40、20x20),用于预测不同尺寸物体的边界框和类信息。在检测过程中引入 SPFF模块用于空间金字塔池化,辅助检测多尺度物体。
总体而言,YOLOv5模型采用骨干网络进行特征提取,颈部网络进行特征融合,检测头 进行目标检测的设计。通过有效的特征融合和金字塔结构,在单阶段检测任务中实现了良好 的检测精度和实时性。
3. 实验
3.1. 数据收集
为了便于基于yolov5的苹果检测系统的开发和评估,我们编制了一个全面的苹果图像数据集。 这个数据集是通过web抓取方法和利用内部图像存储库的组合来策划的。重点是获取描述各 种苹果品种、果园环境、光照条件和遮挡程度的图像,从而增强模型的泛化能力。在获取原 始图像数据之后,进行了细致的人工注释程序,以精确地描绘每个图像中单个苹果周围的边 界框。这些标注涉及到分配适当的类标签,以方便后续的模型训练和评估。
3.2. 实验设置
实验利用了一个数据集,其中包括果园果树,精心标注了苹果的位置。这个数据集被划分为 不同的训练集、验证集和测试集,遵循3:1:1的比例比例。
在追求针对苹果识别这一特定任务优化YOLOv5m架构的过程中,仔细考虑了它在计算 效率和性能之间的内在平衡。采用了涉及模型微调的定制方法,利用了在我们相对受限的数 据集上的预训练策略。用不同的变换来增强数据集,如随机旋转、裁剪和缩放,这有助于增 强模型的泛化能力。
此外,对YOLOv5的锚框进行了改进,以更好地与审查下数据集的大小和形态保持一致。 实施微调的学习率方案,辅以衰减策略,旨在促进训练稳定性和收敛性。值得注意的是,对 损失函数内各种损失组件的权重进行了细致的调整,以确保在整个训练轨迹中产生协调的影 响。
3.3. 实验结果
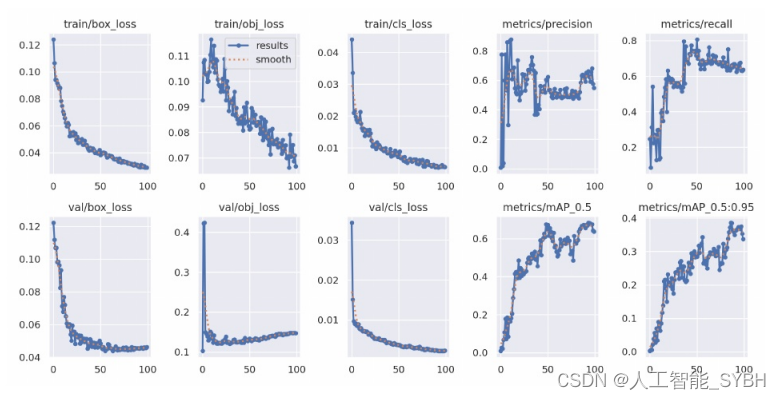
图2描述了YOLOv5模型在整个训练过程中各种指标的进展情况。这些曲线描绘了各种类型的 损失和对评估至关重要的性能指标并在训练过程中监测模型的有效性。
随着训练的进行,训练和验证损失都呈现递减趋势,表明模型在两个数据集上最小化误差的 能力有所提高。同时,性能指标呈现出波动的整体上升轨迹,表明在整个训练过程中,模型的目 标检测能力逐渐增强。
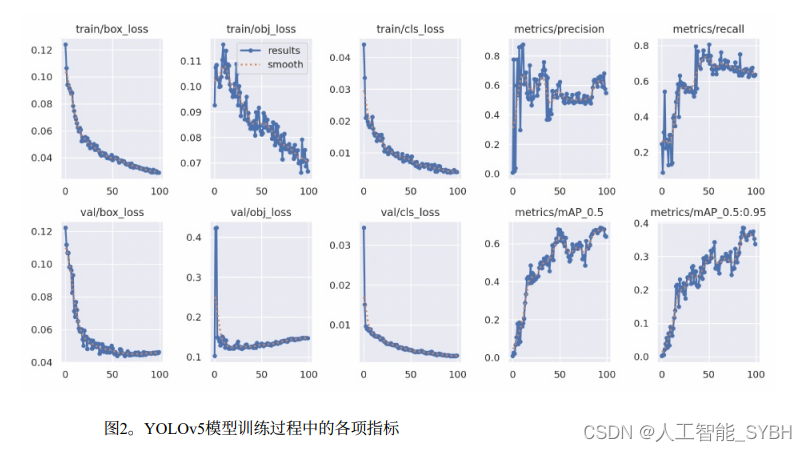
图3和图4展示了不同场景下的苹果识别结果。值得注意的是,在测试集上,我们的模型显示 了85%的准确率,强调了其在不同条件下准确识别苹果的有效性。

3.4. 算法比较
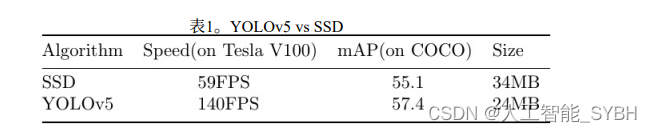
此外,对YOLOv5和SSD进行了广泛的比较[7],以确定它们对苹果采摘特定任务的适用性。如表1 所示,YOLOv5在多个指标上明显优于SSD。值得注意的是,YOLOv5表现得更好与SSD相比,速度和模型大小效率,从而使其更适合实时应用程序。此外,在精度方面, YOLOv5略微超过SSD,进一步肯定了其在苹果采摘等精确目标检测任务中的有效性。
总之,YOLOv5在实时目标检测方面的先进技术和卓越性能,特别是在农业图像处理 方面的应用前景,使其成为苹果检测和定位任务的理想解决方案。它快速准确识别物体的 能力与农业环境固有的复杂性很好地吻合,使其成为提高与苹果相关过程的生产力和效率 的宝贵工具。
4. 挑战与展望
随着时间的推移,YOLO算法经历了连续的迭代,产生了针对不同任务和数据属性优化的 不同版本。在农业环境中,精确、快速、实时和有弹性的目标检测是必不可少的,YOLO 成为一种合适的解决方案。它擅长在计算效率和检测精度之间实现微妙的平衡。值得注意 的是,YOLO能够在实时场景中快速、高效地识别物体,同时仍然保持值得称赞的准确性。 例如,使用YOLO+MRM[8],在一条肉鸡自动屠宰线上每小时检测到超过18万只肉鸡。 Nasirahmadi证明,YOLOv4实现了29帧/秒的帧率,同时在收获过程中对机械甜菜损伤检测 保持90%以上的精度。
农业中目标检测的性能受到农业目标的多变性和环境复杂性的显著影响。因此,研究 人员经常强调,为了开发出既准确又鲁棒的模型,集合广泛而多样的数据集用于模型训练 的重要性,包括不同的生长阶段、光照条件和多个田间位置或场景。收集广泛的训练图像 以考虑环境的变化,包括光照条件的变化、季节变化以及雨、云和亮度等天气条件的变化, 是非常必要的。
5. 结论
本文研究了利用YOLOv5对果园场景中的苹果进行识别和检测。在专门策划的数据集上实 现了85%的准确率,展示了该方法的有效性。此外,本文还阐述了YOLOv5算法在果园环 境中的适用性,并与SSD算法进行了比较,以突出其优势。最后,对研究结果进行了总结, 并对自然场景分析的未来发展趋势和挑战进行了展望。此外,它还提供了在该领域进一步 改进的潜在方向的见解.
















 1194
1194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











