






 本文详细介绍了如何通过电脑端的IP设置、UR5e机械臂示教器的配置,以及Python脚本,实现对UR5e机械臂的远程控制。首先,确保电脑和示教器的IP地址一致,然后通过网线连接,最后在Python中编写并发送控制指令,使机械臂移动到指定位置。
本文详细介绍了如何通过电脑端的IP设置、UR5e机械臂示教器的配置,以及Python脚本,实现对UR5e机械臂的远程控制。首先,确保电脑和示教器的IP地址一致,然后通过网线连接,最后在Python中编写并发送控制指令,使机械臂移动到指定位置。
本文旨在使用电脑端socket远程控制UR5e机械臂运动到指定目标点实例,仅供学习参考
目录
1.电脑IP设置
打开网络和Internet设置
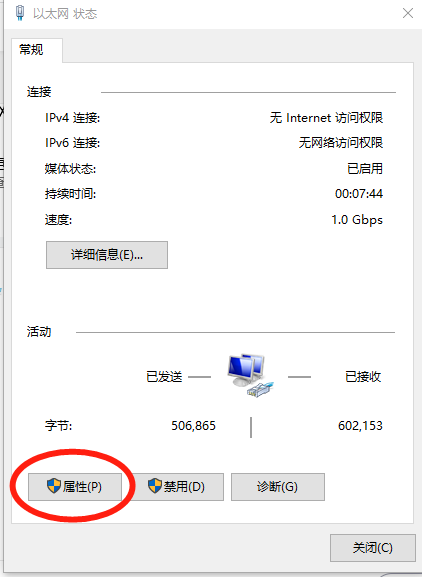
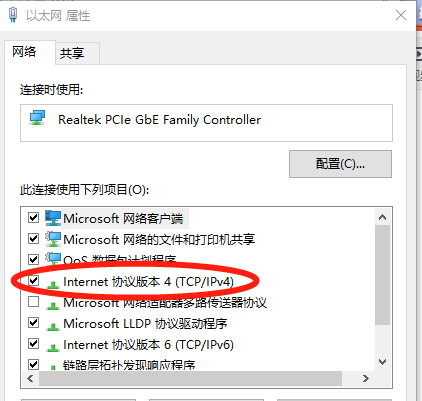
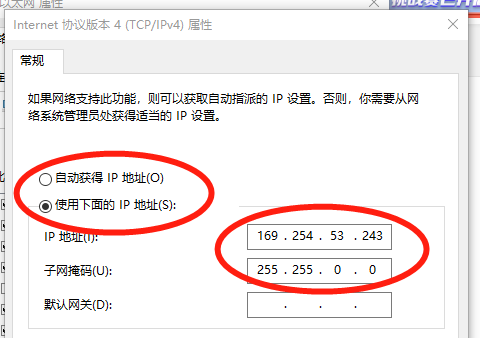
将如下的两个ip地址改为下一节中的机械臂示教器相同的ip地址
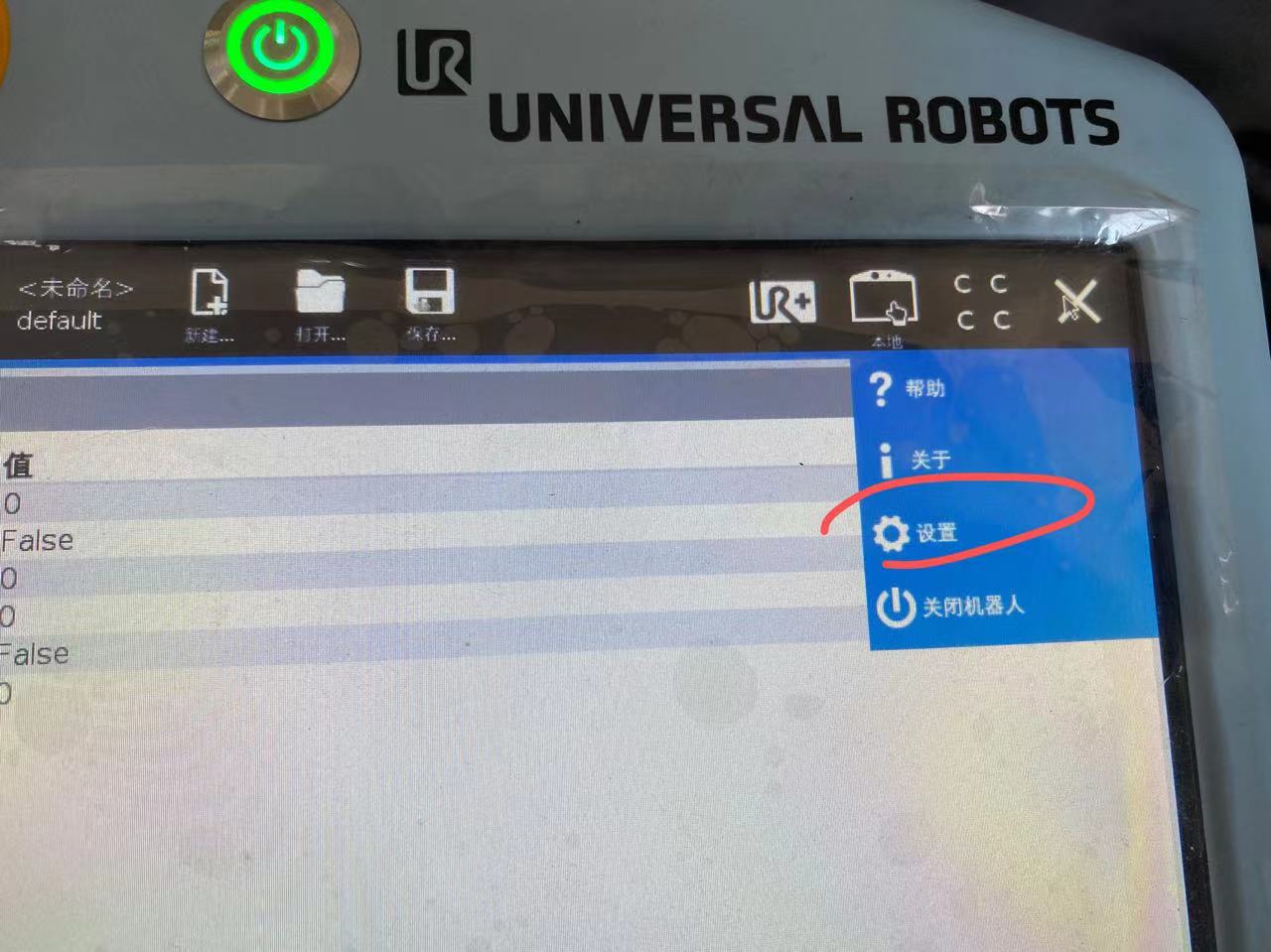
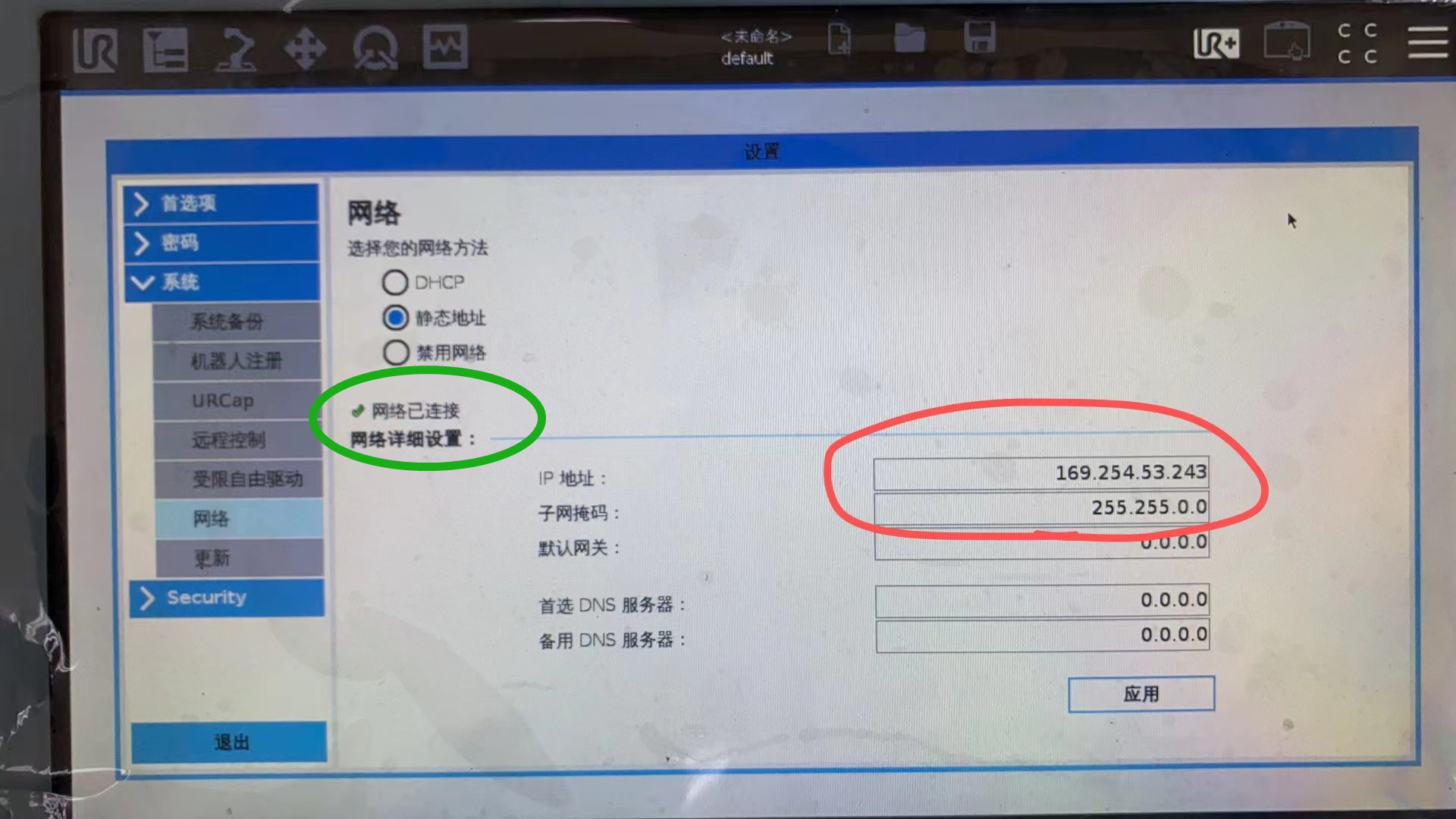
2.UR5e机械臂示教器设置
将ip地址与子网掩码设置成与电脑端相同的ip地址,并点击应用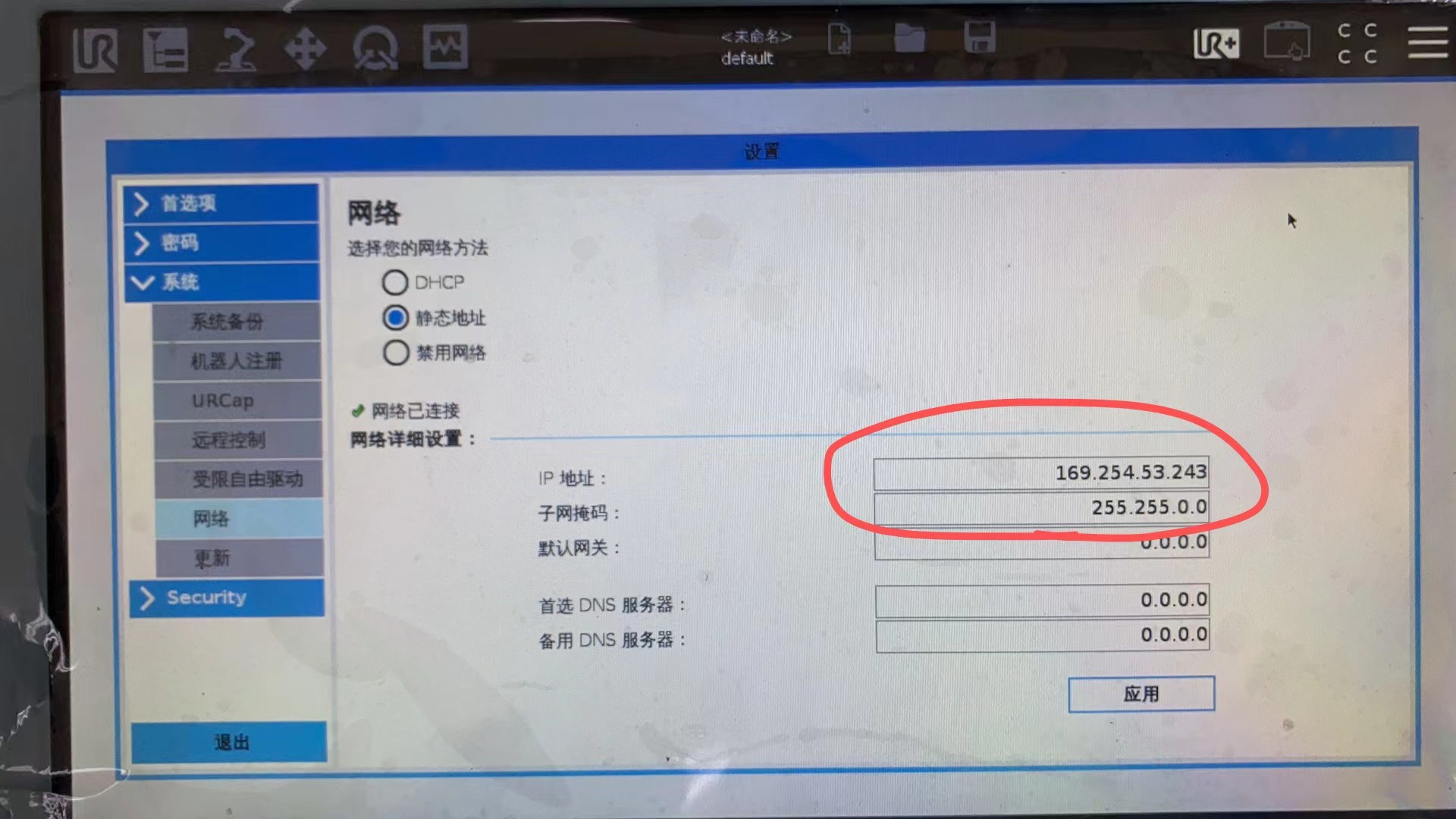
3.实物设置
将网线插入电脑接口以及UR5工控柜,连接好后会出现,网络已连接字样。
4.python输入
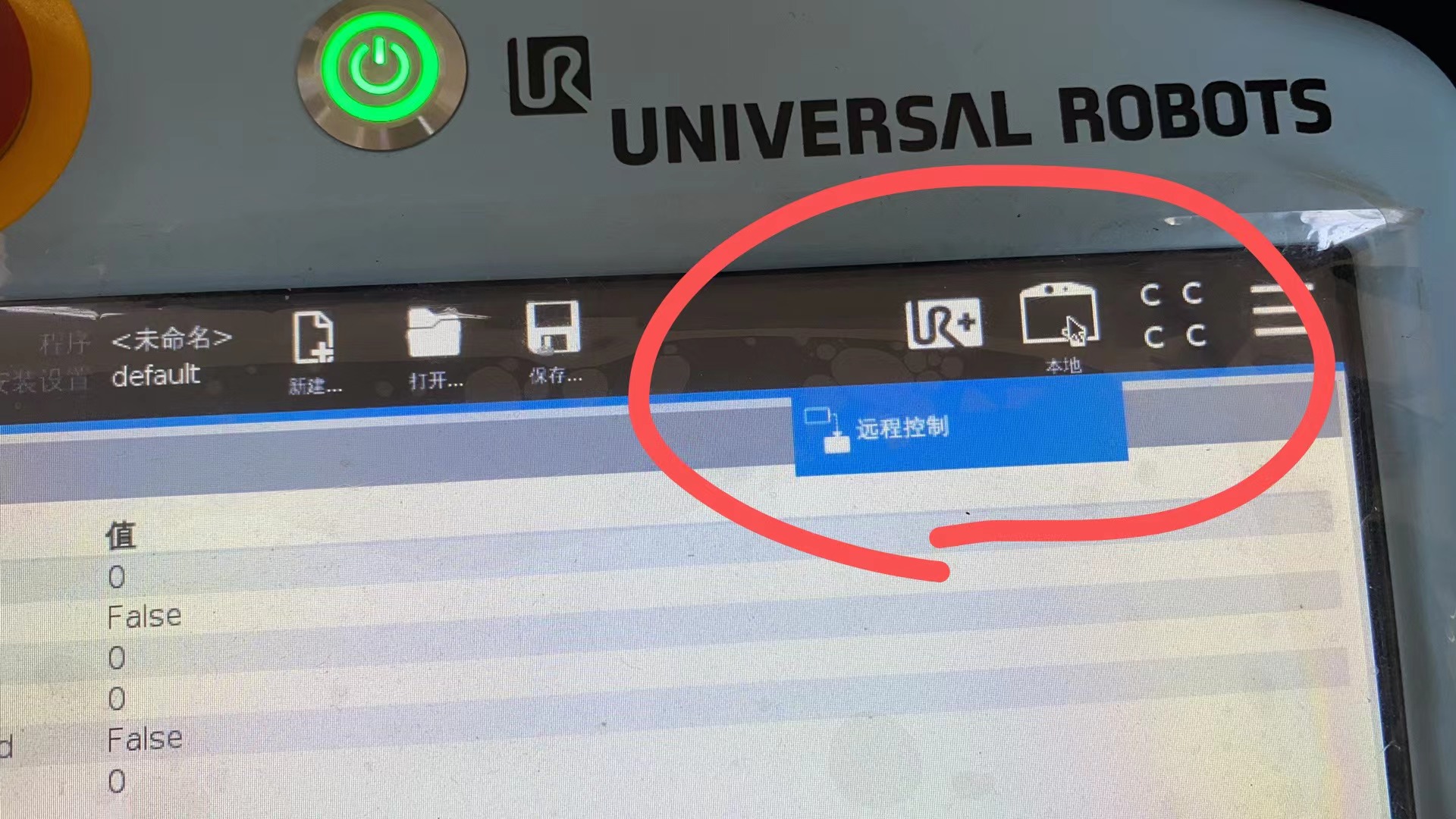
将示教器的本地控制改为远程控制
在python中输入以下代码
import socket
HOST = "169.254.53.243" # The remote host
PORT = 30003 # The same port as used by the server
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.connect((HOST, PORT))
strL = b"movel(p[-0.02,-0.08,0.3,1,-0.1,0.1],a=0.5,v=0.3)\n"
s.send(strL)
s.close()机械臂就成功按照python输入的坐标值运动了


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









