






 本文详细记录了在Ubuntu20.04上安装ORB_SLAM3的过程,包括解决Pangolin配置问题、OpenCV4.4.0的安装以及遇到的libjasper-dev包缺失的解决方法。作者还介绍了如何在ROS2中使用USB摄像头运行ORB_SLAM3,通过修改话题名称解决了节点连接问题。
本文详细记录了在Ubuntu20.04上安装ORB_SLAM3的过程,包括解决Pangolin配置问题、OpenCV4.4.0的安装以及遇到的libjasper-dev包缺失的解决方法。作者还介绍了如何在ROS2中使用USB摄像头运行ORB_SLAM3,通过修改话题名称解决了节点连接问题。
参考
ubuntu 20.04+ORB_SLAM3 安装并行全记录(无坑版)(一)http://t.csdn.cn/inIpy
ubuntu 20.04+ORB_SLAM3 安装并行全记录(无坑版)(二)http://t.csdn.cn/vTplT
本人第一次出现pangolin打不开案例,继续做下去后来可以打开
第二次出现pangolin如下错误,记得修改路径
Pangolin错误描述: Could not find a package configuration file provided by "Pangolin" with anyof the following names:PangolinConfig.cmakehttp://t.csdn.cn/M1two
opencv安装:Ubuntu下Opencv的安装(亲测有效,超级简单!)http://t.csdn.cn/npPuE
这里推荐opencv4.4.0
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
输入这行时会出现两个错误,一个按照系统推荐的 加一个2,
另外一个参考这里error: unable to locate libjasper-dev 无法定位这个包libjasper-dev
解决办法是:执行如下指令
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev输入以下命令,可以查看所安装opencv的版本
pkg-config opencv --modversion4
#opencv4 及以上末尾需要添加4,3不需要到此就可以编译完成ORB-SLAM3,并且能成功运行asl数据集kmavvisualinertialdatasets – ASL Datasets
另一种ros2运行bag包形式,参考
ros2机器人foxy版用笔记本摄像头跑单目orb_slam3http://t.csdn.cn/5doad可以顺利的进行到“重新编译直至成功。”
注意的点是,本人在虚拟机17上面运行,无法添加电脑自带的摄像头,选择外接一个usb摄像头。
下载usb-cam,GitHub - ros-drivers/usb_cam: A ROS Driver for V4L USB Cameras
下载release的Source code (tar)ros2 launch usb_cam demo_launch.pyr.gz,放到catkin_ws/src/usb_cam, 给她编译一下(待完善)
这篇启动节点 ros2 launch usb_cam demo_launch.py
ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml /camera:=/image_raw
思路:
一个终端打开usb摄像头节点 ros2 launch usb_cam demo_launch.py(在最外面或者catkin_ws下都行)
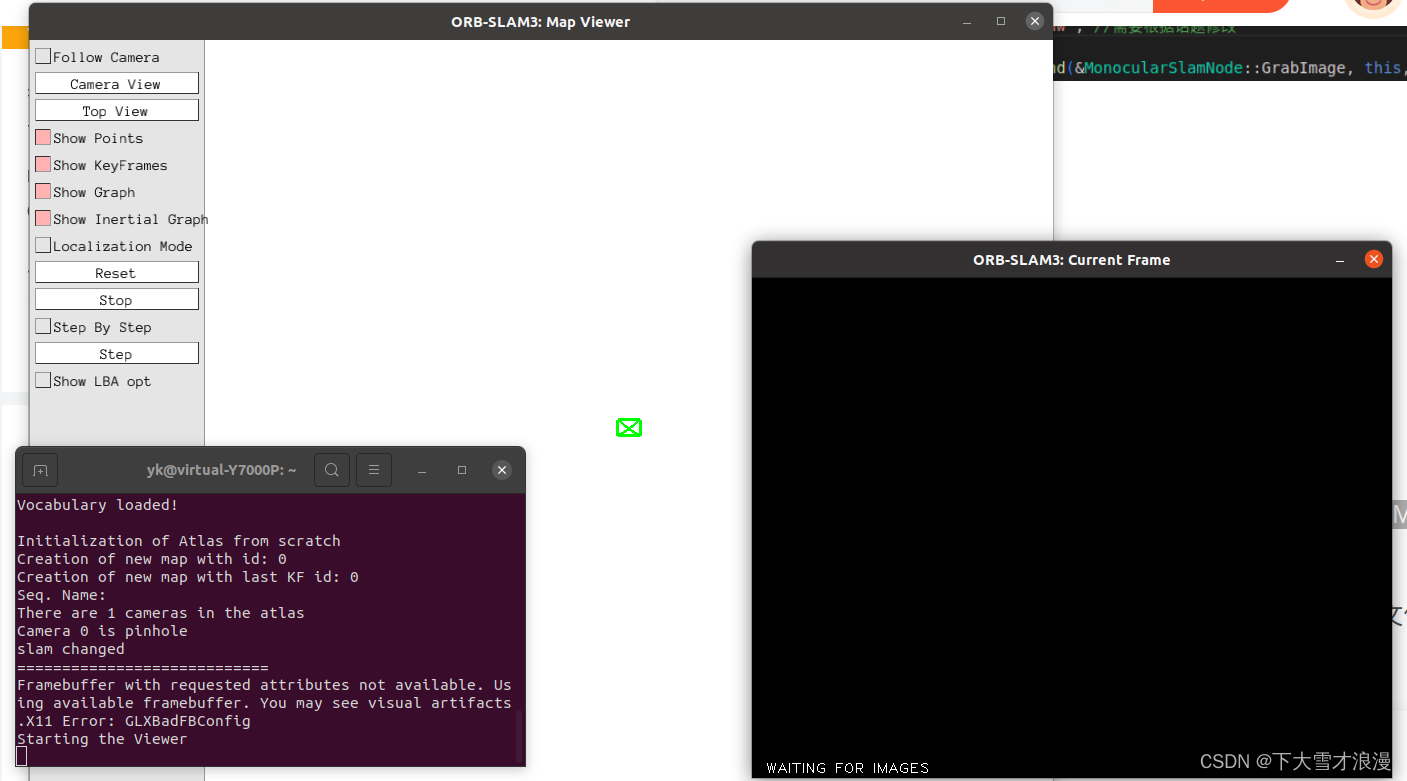
一个打开orbslam2节点 ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
发现没有连接到,终端未显示东西
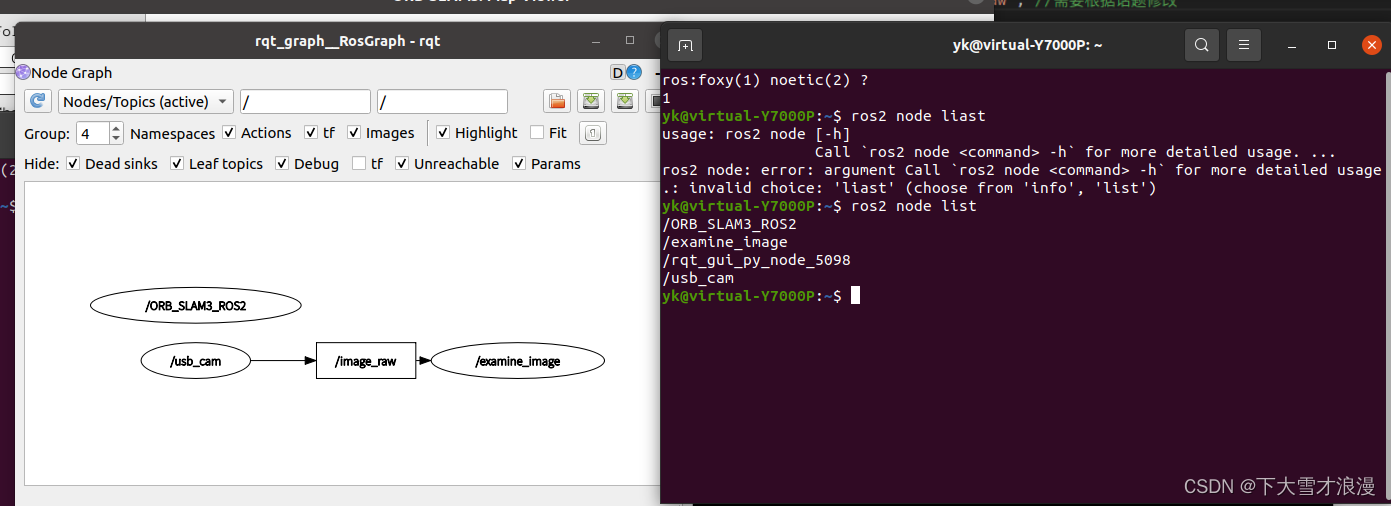
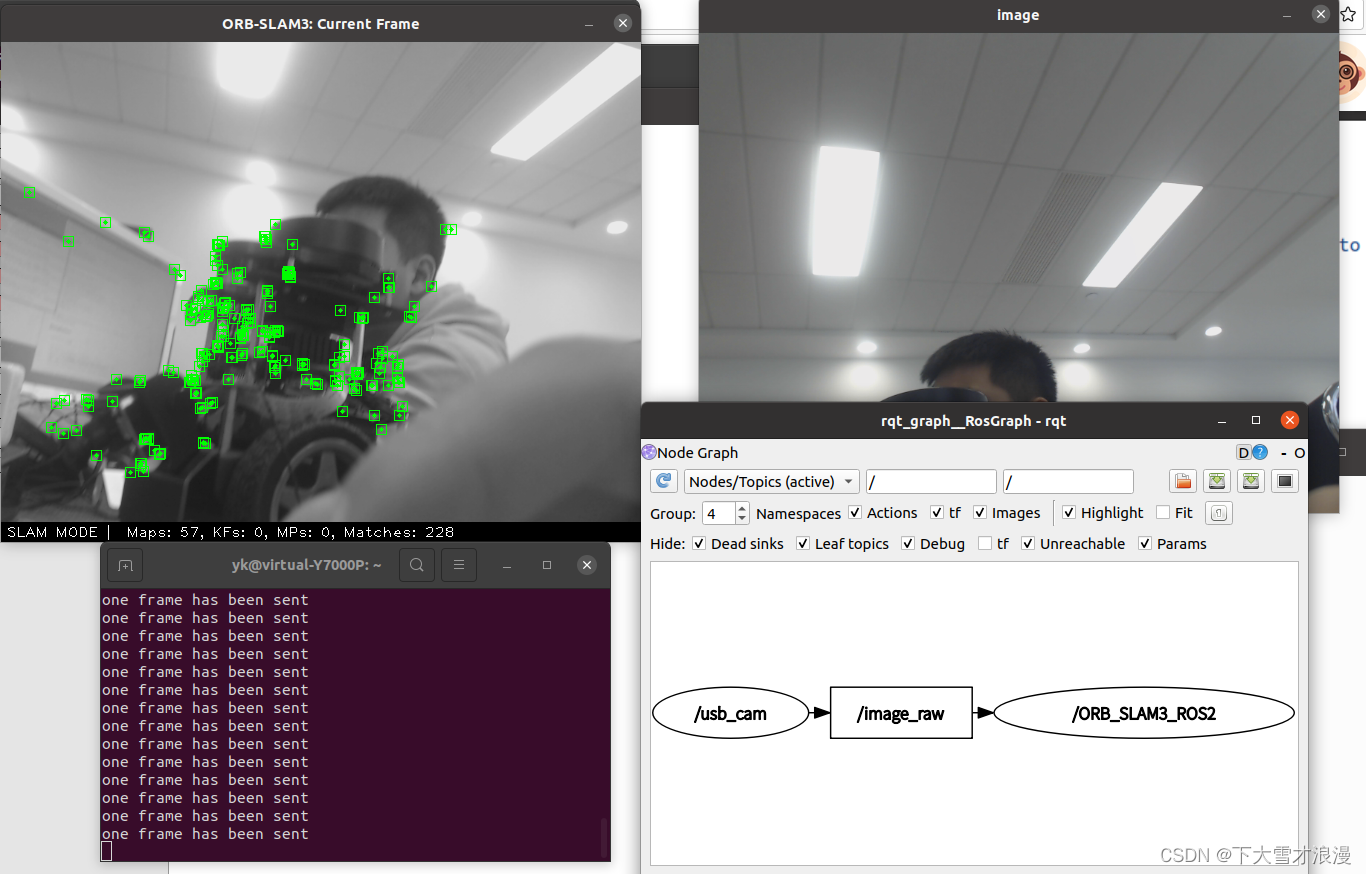
思路解决,rqt_graph和ros2 node list,发现节点/ORB_SLAM3_ROS2没有连上,
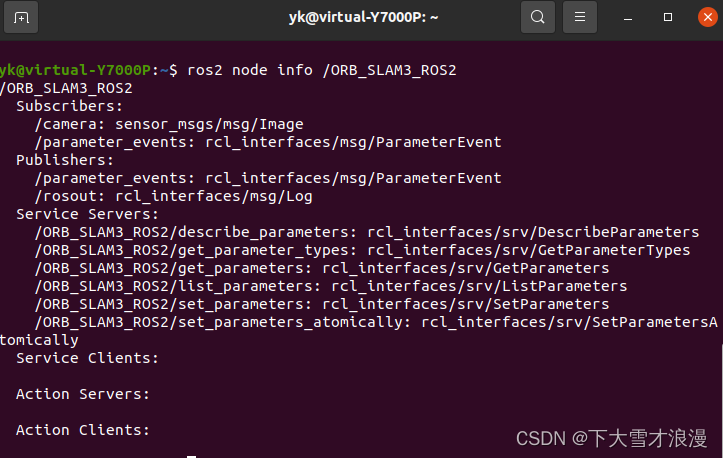
ros2 node info /ORB_SLAM3_ROS2,可以看到它订阅/camera话题
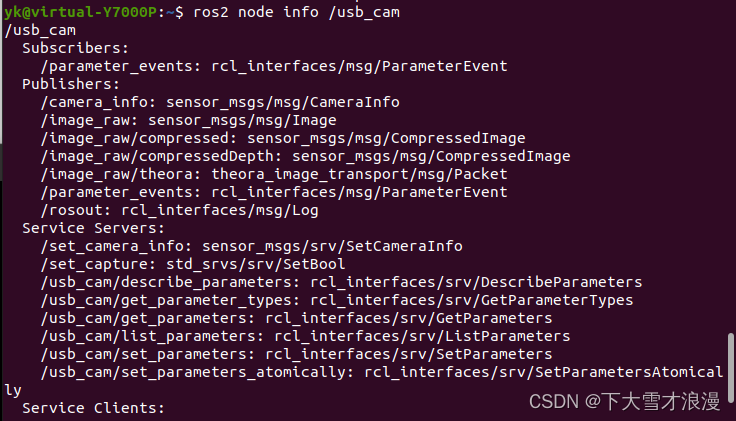
ros2 node info /usb_cam可以看到订阅了/image_raw
说明发布和订阅的没对上,
ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml /camera:=/image_raw
将节点发布的话题从 /camera变成/image_raw就可以了
也可以参考博主写的,刚才测试了一下 还是按照博主写的方法比较好

















 3223
3223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









