







 超级会员免费看
超级会员免费看
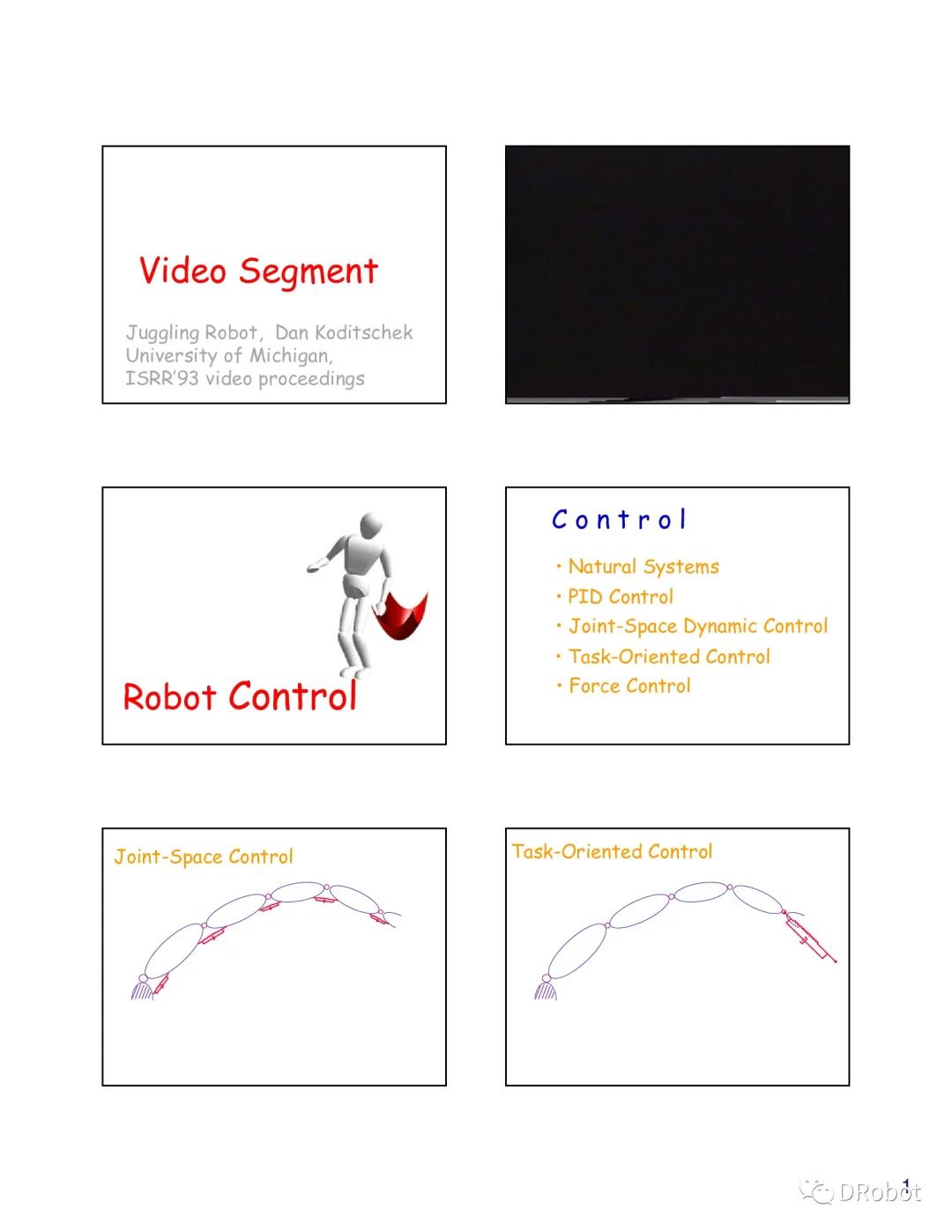
对自由运动的机器人来说,控制的目的是要控制机器人手端的位置和姿态,即所谓位置控制问题。这时希望机器人手端所达到的位置称为期望位置或期望轨迹。期望轨迹可以在机器人任务空间中给出,也可通过逆运动学关系转化为机器人关节空间中的期望轨迹。因此,自由运动机器人位置控制的目的:是要使机器人末端从任意起始位置出发都能到达期望轨迹。
(1)当期望轨迹是固定点时的位置控制称为定点控制问题,从控制的角度看,这属于镇定问题。
(2)当期望轨迹是随时间连续变化轨迹时的控制问题称为轨迹跟踪问题,这属于控制理论中的跟踪问题.
本期主要介绍机器人运动控制原理及常用的控制方法:

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 2795
2795











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











