







一、B 样条基函数的定义和性质
1.1、B 样条基函数的定义
令
U
=
{
u
0
,
u
1
,
⋯
,
u
m
}
U=\{u_0,u_1,\cdots,u_m\}
U={u0,u1,⋯,um} 是一个单调不减的实数序列,即
u
i
≤
u
i
+
1
,
i
=
0
,
1
,
⋯
,
m
−
1
u_i\leq u_{i+1},i=0,1,\cdots,m-1
ui≤ui+1,i=0,1,⋯,m−1。其中,
u
i
u_i
ui 称为节点,
U
U
U 称为节点矢量,用
N
i
,
p
(
u
)
N_{i,p}(u)
Ni,p(u) 表示第
i
i
i 个
p
p
p 次(
p
+
1
p+1
p+1 阶)B 样条基函数,其定义为(也称为 Cox-deBoor 公式)
N
i
,
0
(
u
)
=
{
1
,
u
i
≤
u
<
u
i
+
1
,
0
,
e
l
s
e
N
i
,
p
(
u
)
=
u
−
u
i
u
i
+
p
−
u
i
N
i
,
p
−
1
(
u
)
+
u
i
+
p
+
1
−
u
u
i
+
p
+
1
−
u
i
+
1
N
i
+
1
,
p
−
1
(
u
)
(1)
\begin{aligned} N_{i,0}(u)&=\begin{cases}1,\quad &u_i\leq u< u_{i+1},\\ 0,&else \end{cases}\\[3ex] N_{i,p}(u)&=\frac{u-u_i}{u_{i+p}-u_i}N_{i,p-1}(u)+\frac{u_{i+p+1}-u}{u_{i+p+1}-u_{i+1}}N_{i+1,p-1}(u)\tag{1} \end{aligned}
Ni,0(u)Ni,p(u)={1,0,ui≤u<ui+1,else=ui+p−uiu−uiNi,p−1(u)+ui+p+1−ui+1ui+p+1−uNi+1,p−1(u)(1)
由上述定义式可知:
- 事先指定节点矢量 U U U 和次数 p p p, 即可计算出对应的一组基函数;
- 半开区间 u ∈ [ u i , u i + 1 ) u\in [u_i,u_{i+1}) u∈[ui,ui+1) 称为第 i i i 个节点区间,它的长度可以为零,因为相邻节点可以是相同的;
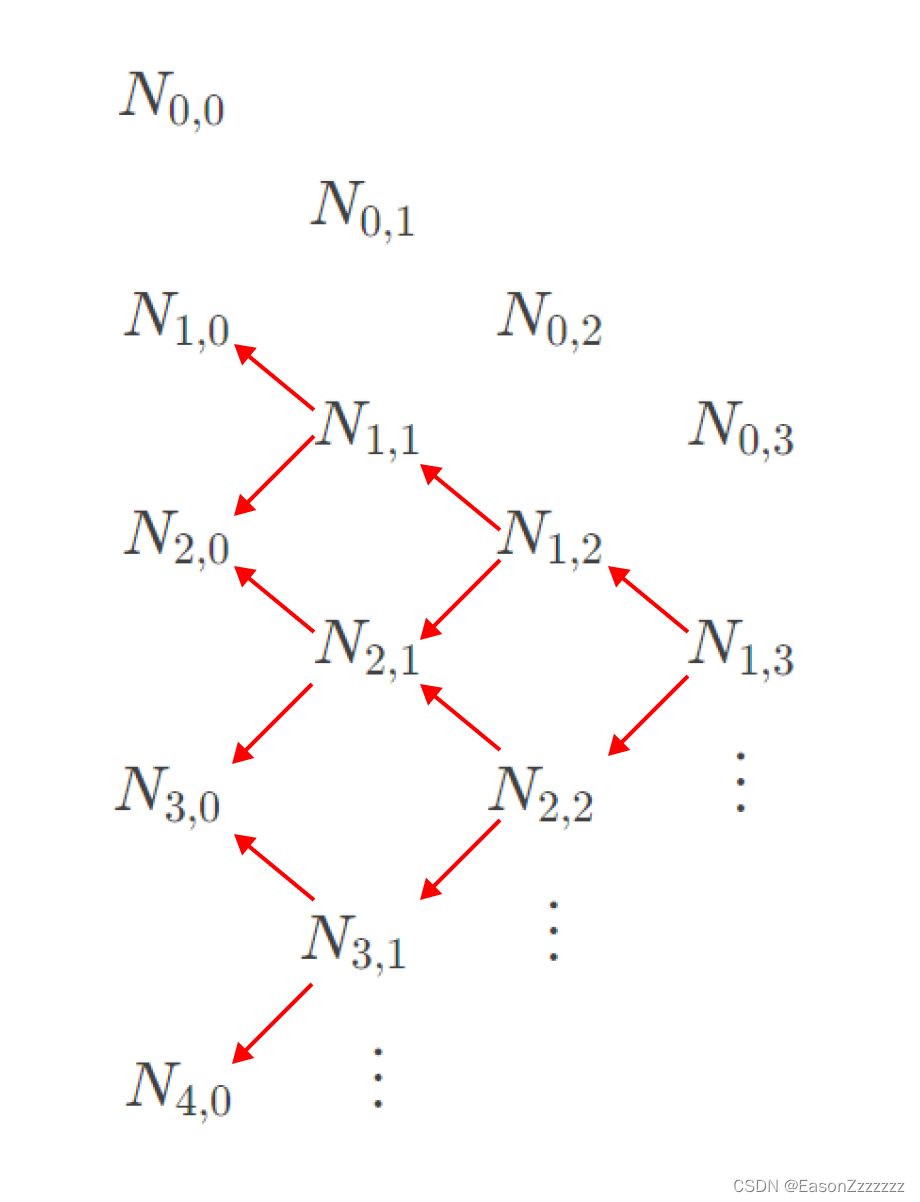
- 计算
p
p
p 次基函数的过程生成一个如下形式的三角形阵列:(通常将
N
i
,
p
(
u
)
N_{i,p}(u)
Ni,p(u) 写为
N
i
,
p
N_{i,p}
Ni,p)
N 0 , 0 N 0 , 1 N 1 , 0 N 0 , 2 N 1 , 1 N 0 , 3 N 2 , 0 N 1 , 2 N 2 , 1 N 1 , 3 N 3 , 0 N 2 , 2 ⋮ N 3 , 1 ⋮ N 4 , 0 ⋮ N_{0,0}\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\\[1ex] N_{0,1}\quad\quad\quad\quad\quad\quad\\[1ex] N_{1,0}\quad\quad\quad\quad N_{0,2}\quad\quad\quad\quad\quad\quad\\[1ex] \quad\quad\quad\quad\quad\quad N_{1,1}\quad\quad\quad\quad N_{0,3}\quad\quad\quad\quad\quad\quad\\[1ex] N_{2,0}\quad\quad\quad\quad N_{1,2}\quad\quad\quad\quad\quad\quad\\[1ex] \quad\quad\quad\quad\quad\quad N_{2,1}\quad\quad\quad\quad N_{1,3}\quad\quad\quad\quad\quad\quad\\[1ex] N_{3,0}\ \ \ \quad\quad\quad N_{2,2}\quad\quad\vdots\quad\quad\quad\quad\\[1ex] \quad\quad\quad\quad\quad\quad N_{3,1}\quad\quad\vdots\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad \\[1ex] N_{4,0}\quad\quad\vdots\quad\quad\quad\quad\quad\quad\quad\quad\quad\ \ N0,0N0,1N1,0N0,2N1,1N0,3N2,0N1,2N2,1N1,3N3,0 N2,2⋮N3,1⋮N4,0⋮
例1. 令
U
=
{
u
0
=
0
,
u
1
=
0
,
u
2
=
0
,
u
3
=
1
,
u
4
=
1
,
u
5
=
1
}
,
p
=
2
U=\{u_0=0,u_1=0,u_2=0,u_3=1,u_4=1,u_5=1\},p=2
U={u0=0,u1=0,u2=0,u3=1,u4=1,u5=1},p=2,我们分别计算 0 次、1 次和 2 次的 B 样条基函数。
N
0
,
0
=
N
1
,
0
=
0
,
−
∞
<
u
<
∞
N
2
,
0
=
{
1
,
0
≤
u
<
1
0
,
其他
N
3
,
0
=
N
4
,
0
=
0
,
−
∞
<
u
<
∞
N
0
,
1
=
u
−
0
0
−
0
N
0
,
0
+
0
−
u
0
−
0
N
1
,
0
=
0
,
−
∞
<
u
<
∞
N
1
,
1
=
u
−
0
0
−
0
N
1
,
0
+
1
−
u
1
−
0
N
2
,
0
=
{
1
−
u
,
0
≤
u
<
1
0
,
其他
N
2
,
1
=
u
−
0
1
−
0
N
2
,
0
+
1
−
u
1
−
1
N
3
,
0
=
{
u
,
0
≤
u
<
1
0
,
其他
N
3
,
1
=
u
−
1
1
−
1
N
3
,
0
+
1
−
u
1
−
1
N
4
,
0
=
0
,
−
∞
<
u
<
∞
N
0
,
2
=
u
−
0
0
−
0
N
0
,
1
+
1
−
u
1
−
0
N
1
,
1
=
{
(
1
−
u
)
2
,
0
≤
u
<
1
0
,
其他
N
1
,
2
=
u
−
0
1
−
0
N
1
,
1
+
1
−
u
1
−
0
N
2
,
1
=
{
2
u
(
1
−
u
)
,
0
≤
u
<
1
0
,
其他
N
2
,
2
=
u
−
0
1
−
0
N
2
,
1
+
1
−
u
1
−
1
N
3
,
1
=
{
u
2
,
0
≤
u
<
1
0
,
其他
\begin{aligned} &N_{0,0}=N_{1,0}=0,\quad -\infty<u<\infty\\[2ex] &N_{2,0}=\begin{cases}1,\quad &0\leq u<1\\[2ex] 0,&其他 \end{cases}\\[2ex] &N_{3,0}=N_{4,0}=0,\quad -\infty<u<\infty\\[2ex] &N_{0,1}=\frac{u-0}{0-0}N_{0,0}+\frac{0-u}{0-0}N_{1,0}=0,\quad -\infty<u<\infty\\[2ex] &N_{1,1}=\frac{u-0}{0-0}N_{1,0}+\frac{1-u}{1-0}N_{2,0}=\begin{cases}1-u,\quad &0\leq u<1\\[2ex]0,&其他\end{cases}\\[2ex] &N_{2,1}=\frac{u-0}{1-0}N_{2,0}+\frac{1-u}{1-1}N_{3,0}=\begin{cases}u,\quad &0\leq u<1\\[2ex]0,&其他\end{cases}\\[2ex] &N_{3,1}=\frac{u-1}{1-1}N_{3,0}+\frac{1-u}{1-1}N_{4,0}=0,\quad -\infty<u<\infty\\[2ex] &N_{0,2}=\frac{u-0}{0-0}N_{0,1}+\frac{1-u}{1-0}N_{1,1}=\begin{cases}(1-u)^2,\quad &0\leq u<1\\[2ex]0,&其他\end{cases}\\[2ex] &N_{1,2}=\frac{u-0}{1-0}N_{1,1}+\frac{1-u}{1-0}N_{2,1}=\begin{cases}2u(1-u),\quad &0\leq u<1\\[2ex]0,&其他\end{cases}\\[2ex] &N_{2,2}=\frac{u-0}{1-0}N_{2,1}+\frac{1-u}{1-1}N_{3,1}=\begin{cases}u^2,\quad &0\leq u<1\\[2ex]0,&其他\end{cases}\\[2ex] \end{aligned}
N0,0=N1,0=0,−∞<u<∞N2,0=⎩
⎨
⎧1,0,0≤u<1其他N3,0=N4,0=0,−∞<u<∞N0,1=0−0u−0N0,0+0−00−uN1,0=0,−∞<u<∞N1,1=0−0u−0N1,0+1−01−uN2,0=⎩
⎨
⎧1−u,0,0≤u<1其他N2,1=1−0u−0N2,0+1−11−uN3,0=⎩
⎨
⎧u,0,0≤u<1其他N3,1=1−1u−1N3,0+1−11−uN4,0=0,−∞<u<∞N0,2=0−0u−0N0,1+1−01−uN1,1=⎩
⎨
⎧(1−u)2,0,0≤u<1其他N1,2=1−0u−0N1,1+1−01−uN2,1=⎩
⎨
⎧2u(1−u),0,0≤u<1其他N2,2=1−0u−0N2,1+1−11−uN3,1=⎩
⎨
⎧u2,0,0≤u<1其他
1.2、B 样条基函数的性质
P1 局部支撑性
如何
u
∉
[
u
i
,
u
i
+
p
+
1
]
u\notin[u_i,u_{i+p+1}]
u∈/[ui,ui+p+1],则
N
i
,
p
(
u
)
=
0
N_{i,p}(u)=0
Ni,p(u)=0,如下图所示,
N
1
,
3
N_{1,3}
N1,3 是
N
1
,
0
,
N
2
,
0
,
N
3
,
0
N_{1,0},N_{2,0},N_{3,0}
N1,0,N2,0,N3,0 和
N
4
,
0
N_{4,0}
N4,0 的线性组合,因此
N
1
,
3
N_{1,3}
N1,3 仅在
u
∈
[
u
1
,
u
5
)
u\in[u_1,u_5)
u∈[u1,u5) 上非零。
P2
在任意给定的节点区间 [ u i , u j ) [u_i,u_j) [ui,uj) 内,最多 p + 1 p+1 p+1 个 N i , p N_{i,p} Ni,p 是非零的,它们是 N i − p , ⋯ , N i , p N_{i-p},\cdots,N_{i,p} Ni−p,⋯,Ni,p。
P3 非负性
对于所有 i , p i,p i,p 和 u u u,有 N i , p ( u ) ≥ 0 N_{i,p}(u)\geq 0 Ni,p(u)≥0
P4 规范性
对于任意的节点区间 [ u i , u i + 1 ) [u_i,u_{i+1}) [ui,ui+1),当 u ∈ [ u i , u i + 1 ) u\in[u_i,u_{i+1}) u∈[ui,ui+1) 时, ∑ j = i − p i N j , p = 1 \sum_{j=i-p}^iN_{j,p}=1 ∑j=i−piNj,p=1,即同一次数的基函数和为 1。
P5 可微性
在节点区间内部, N i , p ( u ) N_{i,p}(u) Ni,p(u) 是无限次可微的(在每个节点区间内部,它是一个多项式)。在节点处 N i , p ( u ) N_{i,p}(u) Ni,p(u) 是 p − k p-k p−k 次连续可微的,其中 k k k 是节点的重复度。因此,增加次数将提高曲线的连续性,而增加节点的重复度则使连续性降低。
P6
非周期节点矢量具有如下形式:
U
=
{
a
,
⋯
,
a
⏟
p
+
1
,
u
p
+
1
,
⋯
,
u
m
−
p
−
1
,
b
,
⋯
,
b
⏟
p
+
1
}
(2)
U=\{\underbrace{a,\cdots,a}_{p+1},u_{p+1},\cdots,u_{m-p-1},\underbrace{b,\cdots,b}_{p+1}\}\tag{2}
U={p+1
a,⋯,a,up+1,⋯,um−p−1,p+1
b,⋯,b}(2)
定义在非周期节点矢量上,设节点个数是
m
+
1
m+1
m+1,则存在
n
+
1
n+1
n+1 个基函数(每个控制点对应一个基函数),这里
n
=
m
−
p
−
1
n=m-p-1
n=m−p−1;并且,
N
0
,
p
(
a
)
=
1
,
N
n
,
p
(
b
)
=
1
N_{0,p}(a)=1,N_{n,p}(b)=1
N0,p(a)=1,Nn,p(b)=1,
N
i
,
p
(
a
)
=
0
,
i
≠
0
N_{i,p}(a)=0,i\neq 0
Ni,p(a)=0,i=0 且
N
i
,
p
(
b
)
=
0
,
i
≠
n
N_{i,p}(b)=0,i\neq n
Ni,p(b)=0,i=n
二、B 样条基函数的计算
令 U = { u 0 , u 1 , ⋯ , u m } U=\{u_0,u_1,\cdots,u_m\} U={u0,u1,⋯,um} 为形如(2)式的节点矢量,假设我们感兴趣的是 p p p 次基函数,并假设 u u u 是固定的, u ∈ [ u i , u i + 1 ) u\in[u_i,u_{i+1}) u∈[ui,ui+1)。我们给出以下两个算法,分别用来计算:
- 计算 u u u 所属的节点区间的下标 i i i;
- 基于(1)式计算 N i − p , p , ⋯ , N i , p N_{i-p,p},\cdots,N_{i,p} Ni−p,p,⋯,Ni,p;
由性质 P2 和假设 u ∈ [ u i , u i + 1 ) u\in[u_i,u_{i+1}) u∈[ui,ui+1),我们可以只把注意力集中在计算函数 N i − p , p , ⋯ , N i , p N_{i-p,p},\cdots,N_{i,p} Ni−p,p,⋯,Ni,p 上,因为其他所有函数都为 0,没必要费力去计算它们。因此,计算的第一步就是确定 u u u 所属的节点区间,这可以对节点矢量使用二分法搜索得到。由于我们使用的区间形式为 u ∈ [ u i , u i + 1 ) u\in[u_i,u_{i+1}) u∈[ui,ui+1),在计算基函数时需要特殊考虑的一个情况是 u = u m u=u_m u=um 的情形。这时,我们直接将节点区间的下标设置为 n = m − p − 1 n=m-p-1 n=m−p−1
def FindSpan(p, u, U):
"""
确定参数 u 所在的节点区间的下标
:param p: 基函数次数
:param u: 固定点
:param U: 节点矢量
:return: u 所属的节点区间的下标
"""
m = len(U) - 1
start, end = p, m
if u == U[-1]:
return m - p - 1
while end != start + 1 and end != start:
mid_index = (start + end) // 2
if U[mid_index] == u:
return mid_index
if u > U[mid_index]:
start = mid_index
else:
end = mid_index
return start
现在我们来考虑第二个算法。假设
u
u
u 在第
i
i
i 个节点区间内,计算所有非零 B 样条基函数的过程可形成如下的一个倒置的三角形:

我们利用(1)式写出二次基函数的一般形式,有
N
i
−
2
,
2
(
u
)
=
u
−
u
i
−
2
u
i
−
u
i
−
2
N
i
−
2
,
1
(
u
)
+
u
i
+
1
−
u
u
i
+
1
−
u
i
−
1
N
i
−
1
,
1
(
u
)
N
i
−
1
,
2
(
u
)
=
u
−
u
i
−
1
u
i
+
1
−
u
i
−
1
N
i
−
1
,
1
(
u
)
+
u
i
+
2
−
u
u
i
+
2
−
u
i
N
i
,
1
(
u
)
N
i
,
2
(
u
)
=
u
−
u
i
u
i
+
2
−
u
i
N
i
,
1
(
u
)
+
u
i
+
3
−
u
u
i
+
3
−
u
i
+
1
N
i
+
1
,
1
(
u
)
(3)
\begin{aligned} &N_{i-2,2}(u)=\frac{u-u_{i-2}}{u_i-u_{i-2}}N_{i-2,1}(u)+\frac{u_{i+1}-u}{u_{i+1}-u_{i-1}}N_{i-1,1}(u)\\[2ex] &N_{i-1,2}(u)=\frac{u-u_{i-1}}{u_{i+1}-u_{i-1}}N_{i-1,1}(u)+\frac{u_{i+2}-u}{u_{i+2}-u_{i}}N_{i,1}(u)\\[2ex] &N_{i,2}(u)=\frac{u-u_{i}}{u_{i+2}-u_{i}}N_{i,1}(u)+\frac{u_{i+3}-u}{u_{i+3}-u_{i+1}}N_{i+1,1}(u)\\[2ex] \end{aligned}\tag{3}
Ni−2,2(u)=ui−ui−2u−ui−2Ni−2,1(u)+ui+1−ui−1ui+1−uNi−1,1(u)Ni−1,2(u)=ui+1−ui−1u−ui−1Ni−1,1(u)+ui+2−uiui+2−uNi,1(u)Ni,2(u)=ui+2−uiu−uiNi,1(u)+ui+3−ui+1ui+3−uNi+1,1(u)(3)
我们引入符号
l
e
f
t
[
j
]
=
u
−
u
i
+
1
−
j
,
r
i
g
h
t
[
j
]
=
u
i
+
j
−
u
\mathrm{left}[\ j\ ]=u-u_{i+1-j},\quad \mathrm{right}[\ j\ ]=u_{i+j}-u
left[ j ]=u−ui+1−j,right[ j ]=ui+j−u
那么(3)式可以写为
N
i
−
2
,
2
(
u
)
=
l
e
f
t
[
3
]
r
i
g
h
t
[
0
]
+
l
e
f
t
[
3
]
N
i
−
2
,
1
(
u
)
+
r
i
g
h
t
[
1
]
r
i
g
h
t
[
1
]
+
l
e
f
t
[
2
]
N
i
−
1
,
1
(
u
)
N
i
−
1
,
2
(
u
)
=
l
e
f
t
[
2
]
r
i
g
h
t
[
1
]
+
l
e
f
t
[
2
]
N
i
−
1
,
1
(
u
)
+
r
i
g
h
t
[
2
]
r
i
g
h
t
[
2
]
+
l
e
f
t
[
1
]
N
i
,
1
(
u
)
N
i
,
2
(
u
)
=
l
e
f
t
[
1
]
r
i
g
h
t
[
2
]
+
l
e
f
t
[
1
]
N
i
,
1
(
u
)
+
r
i
g
h
t
[
3
]
r
i
g
h
t
[
3
]
+
l
e
f
t
[
0
]
N
i
+
1
,
1
(
u
)
\begin{aligned} &N_{i-2,2}(u)=\frac{\mathrm{left}[\ 3\ ]}{\mathrm{right}[\ 0\ ]+\mathrm{left}[\ 3\ ]}N_{i-2,1}(u)+\frac{\mathrm{right}[\ 1\ ]}{\mathrm{right}[\ 1\ ]+\mathrm{left}[\ 2\ ]}N_{i-1,1}(u)\\[2ex] &N_{i-1,2}(u)=\frac{\mathrm{left}[\ 2\ ]}{\mathrm{right}[\ 1\ ]+\mathrm{left}[\ 2\ ]}N_{i-1,1}(u)+\frac{\mathrm{right}[\ 2\ ]}{\mathrm{right}[\ 2\ ]+\mathrm{left}[\ 1\ ]}N_{i,1}(u)\\[2ex] &N_{i,2}(u)=\frac{\mathrm{left}[\ 1\ ]}{\mathrm{right}[\ 2\ ]+\mathrm{left}[\ 1\ ]}N_{i,1}(u)+\frac{\mathrm{right}[\ 3\ ]}{\mathrm{right}[\ 3\ ]+\mathrm{left}[\ 0\ ]}N_{i+1,1}(u)\\[2ex] \end{aligned}
Ni−2,2(u)=right[ 0 ]+left[ 3 ]left[ 3 ]Ni−2,1(u)+right[ 1 ]+left[ 2 ]right[ 1 ]Ni−1,1(u)Ni−1,2(u)=right[ 1 ]+left[ 2 ]left[ 2 ]Ni−1,1(u)+right[ 2 ]+left[ 1 ]right[ 2 ]Ni,1(u)Ni,2(u)=right[ 2 ]+left[ 1 ]left[ 1 ]Ni,1(u)+right[ 3 ]+left[ 0 ]right[ 3 ]Ni+1,1(u)
基于以上观察设计算法,用来计算所有非零 B 样条基函数。
def BaseFunction(p, u, U):
"""
计算所有非零 B 样条基函数的值
:param u: 固定值
:param p: 基函数次数
:param U: 节点矢量
:return: 基函数值数组
"""
i = FindSpan(p, u, U)
N = np.zeros(p + 1)
N[0] = 1.0
left = np.zeros(p + 1)
right = np.zeros(p + 1)
for j in range(1, p + 1):
left[j] = u - U[i + 1 - j]
right[j] = U[i + j] - u
saved = 0.0
for r in range(j):
if (right[r + 1] + left[j - r]) == 0:
temp = 0.0
else:
temp = N[r] / (right[r + 1] + left[j - r])
N[r] = saved + right[r + 1] * temp
saved = left[j - r] * temp
N[j] = saved
return N
三、B 样条曲线的定义和性质
p
p
p 次 B 样条曲线的定义为
C
(
u
)
=
∑
i
=
0
n
N
i
,
p
(
u
)
P
i
,
a
≤
u
≤
b
(1)
\pmb C(u)=\sum_{i=0}^nN_{i,p}(u)\pmb P_i,\quad a\leq u\leq b\tag{1}
C(u)=i=0∑nNi,p(u)Pi,a≤u≤b(1)
这里
P
i
\pmb P_i
Pi 是曲线的控制点,
{
N
i
,
p
(
u
)
}
\{N_{i,p}(u)\}
{Ni,p(u)} 是定义在非周期(并且非均匀)节点矢量
U
=
(
a
,
⋯
,
a
⏟
p
+
1
,
u
p
+
1
,
⋯
,
u
m
−
p
−
1
,
b
,
⋯
,
b
⏟
p
+
1
)
U=\bigg(\underbrace{a,\cdots,a}_{p+1},u_{p+1},\cdots,u_{m-p-1},\underbrace{b,\cdots,b}_{p+1}\bigg)
U=(p+1
a,⋯,a,up+1,⋯,um−p−1,p+1
b,⋯,b)
(包含 m + 1 m+1 m+1 个节点)上的 p p p 次 B 样条基函数。除非特别声明,通常取 a = 0 , b = 1 a=0,b=1 a=0,b=1。由 P i \pmb P_i Pi 构成的多边形称为控制多边形。
对于固定的 u u u 值,计算 B 样条曲线上的对应点需要三步:
- 找到 u u u 所在的节点区间;
- 计算非零的基函数;
- 将非零基函数的值与相应的控制点相乘,再求和。
例.
U
=
{
0
,
0
,
0
,
1
,
2
,
3
,
4
,
4
,
5
,
5
,
5
}
,
u
=
5
2
,
p
=
2
\quad U=\{0,0,0,1,2,3,4,4,5,5,5\},\ \ u=\dfrac{5}{2},\ \ p=2
U={0,0,0,1,2,3,4,4,5,5,5}, u=25, p=2
此时,
u
∈
[
u
4
,
u
5
)
u\in[u_4,u_5)
u∈[u4,u5),则
N
2
,
2
(
5
2
)
=
1
8
,
N
3
,
2
(
5
2
)
=
6
8
,
N
4
,
2
(
5
2
)
=
1
8
N_{2,2}\Big(\dfrac{5}{2}\Big)=\frac{1}{8},\quad N_{3,2}\Big(\dfrac{5}{2}\Big)=\frac{6}{8},\quad N_{4,2}\Big(\dfrac{5}{2}\Big)=\frac{1}{8}
N2,2(25)=81,N3,2(25)=86,N4,2(25)=81
与相应的控制点相乘并求和得
C
(
5
2
)
=
1
8
P
2
+
6
8
P
3
+
1
8
P
4
\pmb C\Big(\dfrac{5}{2}\Big)=\frac{1}{8}\pmb P_2+\frac{6}{8}\pmb P_3+\frac{1}{8}\pmb P_4
C(25)=81P2+86P3+81P4
def CurvePoint(p, U, P, u):
"""
计算 B 样条曲线上的点
:param p: 基函数次数
:param U: 节点矢量
:param P: 控制点
:param u: 固定值
:return: 固定值 u 在 B 样条曲线上的对应值
"""
N = BaseFunction(p, u, U)
span = FindSpan(p, u, U)
C = 0.0
for i in range(p+1):
C = C + N[i] * P[span - p + i]
return C
四、给定点数据的全局曲线插值
假设定义一组数据点
{
Q
k
}
,
k
=
0
,
1
,
⋯
,
n
\{\pmb Q_k\},k=0,1,\cdots,n
{Qk},k=0,1,⋯,n,我们想要用一条
p
p
p 次非有理 B 样条曲线插值于这些点。如果我们为每一点
Q
k
\pmb Q_k
Qk 指定了一个参数值
u
‾
k
\overline{u}_k
uk,并且选定了一个合适的节点矢量
U
=
{
u
0
,
u
1
,
⋯
,
u
m
}
U=\{u_0,u_1,\cdots,u_m\}
U={u0,u1,⋯,um},我们就可以建立一个系数矩阵为
(
n
+
1
)
×
(
n
+
1
)
(n+1)\times(n+1)
(n+1)×(n+1) 的线性方程组
Q
k
=
C
(
u
‾
k
)
=
∑
i
=
0
n
N
i
,
p
(
u
‾
k
)
P
i
\pmb Q_k=\pmb C(\overline{u}_k)=\sum_{i=0}^nN_{i,p}(\overline{u}_k)\pmb P_i
Qk=C(uk)=i=0∑nNi,p(uk)Pi
n + 1 n+1 n+1 个控制点 P i \pmb P_i Pi 是未知量,令 r r r 是 Q i \pmb Q_i Qi 的坐标分量的个数(一般是 2、3 或 4),则存在 r r r 个线性方程组,它们具有相同的系数矩阵,每个方程组的解对应于一个坐标分量的设置。
剩下来的问题是如何选择 Q k \pmb Q_k Qk 对应的参数值 u ‾ k \overline{u}_k uk 以及节点矢量 U U U,这将影响到曲线的形状和参数化
2.1、参数值 u ‾ k \overline{u}_k uk 的选择
假定参数都在 u ∈ [ 0 , 1 ) u\in[0,1) u∈[0,1) 的范围内,通常有三种选择 u ‾ k \overline{u}_k uk 的方法:
1. 均匀参数化:
u
‾
0
=
0
,
u
‾
n
=
1
,
u
‾
k
=
k
n
,
k
=
1
,
2
,
⋯
,
n
−
1
\overline{u}_0=0,\quad\overline{u}_n=1,\quad\overline{u}_k=\frac{k}{n},\quad k=1,2,\cdots,n-1
u0=0,un=1,uk=nk,k=1,2,⋯,n−1
不推荐采用这种方法,因为当数据点分布不均匀时它会产生很奇怪的形状(例如打圈自交)。
2. 弦长参数化:令
d
d
d 为总弦长
d
=
∑
k
=
1
n
∣
Q
k
−
Q
k
−
1
∣
d=\sum_{k=1}^n\mid\pmb Q_k-\pmb Q_{k-1}\mid
d=k=1∑n∣Qk−Qk−1∣
则
u
‾
0
=
0
,
u
‾
n
=
1
\overline{u}_0=0,\overline{u}_n=1
u0=0,un=1
u
‾
k
=
u
‾
k
−
1
+
∣
Q
k
−
Q
k
−
1
∣
d
,
k
=
1
,
2
,
⋯
,
n
−
1
\overline{u}_k=\overline{u}_{k-1}+\frac{\mid\pmb Q_k-\pmb Q_{k-1}\mid}{d},\quad k=1,2,\cdots,n-1
uk=uk−1+d∣Qk−Qk−1∣,k=1,2,⋯,n−1
这是目前最常用的方法,并且一般用它就足够了
3. 向心参数化:令
d
=
∑
k
=
1
n
∣
Q
k
−
Q
k
−
1
∣
d=\sum_{k=1}^n\sqrt{\mid\pmb Q_k-\pmb Q_{k-1}\mid}
d=k=1∑n∣Qk−Qk−1∣
则
u
‾
0
=
0
,
u
‾
n
=
1
\overline{u}_0=0,\overline{u}_n=1
u0=0,un=1
u
‾
k
=
u
‾
k
−
1
+
∣
Q
k
−
Q
k
−
1
∣
d
,
k
=
1
,
2
,
⋯
,
n
−
1
\overline{u}_k=\overline{u}_{k-1}+\frac{\sqrt{\mid\pmb Q_k-\pmb Q_{k-1}\mid}}{d},\quad k=1,2,\cdots,n-1
uk=uk−1+d∣Qk−Qk−1∣,k=1,2,⋯,n−1
当数据点急转弯变化时,这个方法能得到比弦长参数化更好的结果。
2.2、节点矢量 U U U 的选择
1. 等距分布:即
u
0
=
⋯
=
u
p
=
0
,
u
m
−
p
=
⋯
=
u
m
=
1
u
j
+
p
=
j
n
−
p
+
1
,
j
=
1
,
2
,
⋯
,
n
−
p
\begin{aligned} &u_0=\cdots=u_p=0,\quad u_{m-p}=\cdots=u_m=1\\[1ex] &u_{j+p}=\frac{j}{n-p+1},\quad j=1,2,\cdots,n-p \end{aligned}
u0=⋯=up=0,um−p=⋯=um=1uj+p=n−p+1j,j=1,2,⋯,n−p
不推荐采用这种方法,因为它可能导致产生奇异方程组。
2. 平均值分布:
u
0
=
⋯
=
u
p
=
0
,
u
m
−
p
=
⋯
=
u
m
=
1
u
j
+
p
=
1
p
∑
i
=
j
j
+
p
−
1
u
‾
i
,
j
=
1
,
2
,
⋯
,
n
−
p
\begin{aligned} &u_0=\cdots=u_p=0,\quad u_{m-p}=\cdots=u_m=1\\[1ex] &u_{j+p}=\frac{1}{p}\sum_{i=j}^{j+p-1}\overline{u}_i,\quad j=1,2,\cdots,n-p \end{aligned}
u0=⋯=up=0,um−p=⋯=um=1uj+p=p1i=j∑j+p−1ui,j=1,2,⋯,n−p
这种方法节点矢量能很好地反映 u ‾ k \overline{u}_k uk 的分布情况。
def NodeVector(p, Q):
"""
准均匀B样条的节点向量计算
:param p: 基函数次数
:param Q: 数据点数组
:return: 节点矢量
"""
n = Q.shape[1] - 1
d = 0.0
for i in range(1, n + 1): # 计算总弦长
d += np.linalg.norm(Q[:, i] - Q[:, i - 1])
Q_parameterize = np.zeros(n + 1)
Q_parameterize[0] = 0
Q_parameterize[-1] = 1
for i in range(1, n):
Q_parameterize[i] = Q_parameterize[i - 1] + np.linalg.norm(Q[:, i] - Q[:, i - 1]) / d
m = n + p + 1
U = np.zeros(m + 1)
U[m - p:m + 1] = 1
for i in range(1, n - p + 1):
U[i + p] = np.sum(Q_parameterize[i:i + p]) / p
return Q_parameterize, U
五、案例应用
例 令 { Q k } = { ( 0 , 0 ) , ( 3 , 4 ) , ( − 1 , 4 ) , ( − 4 , 0 ) , ( − 4 , − 3 ) , ( − 2 , − 5 ) , ( − 1 , − 7 ) } \{\pmb Q_k\}=\{(0,0),(3,4),(-1,4),(-4,0),(-4,-3),(-2,-5),(-1,-7)\} {Qk}={(0,0),(3,4),(−1,4),(−4,0),(−4,−3),(−2,−5),(−1,−7)},用三次曲线插值这些点。
完整代码如下
import numpy as np
import matplotlib.pyplot as plt
def FindSpan(p, u, U):
"""
确定参数 u 所在的节点区间的下标
:param p: 基函数次数
:param u: 固定点
:param U: 节点矢量 行向量
:return: 节点区间的下标
"""
m = len(U) - 1
start, end = p, m
if u == U[-1]:
return m - p - 1
while end != start + 1 and end != start:
mid_index = (start + end) // 2
if U[mid_index] == u:
return mid_index
if u > U[mid_index]:
start = mid_index
else:
end = mid_index
return start
def BaseFunction(p, u, U):
"""
计算所有非零 B 样条基函数的值
:param u: 固定值
:param p: 基函数次数
:param U: 节点矢量
:return: 基函数值数组
"""
i = FindSpan(p, u, U)
N = np.zeros(p + 1)
N[0] = 1.0
left = np.zeros(p + 1)
right = np.zeros(p + 1)
for j in range(1, p + 1):
left[j] = u - U[i + 1 - j]
right[j] = U[i + j] - u
saved = 0.0
for r in range(j):
if (right[r + 1] + left[j - r]) == 0:
temp = 0.0
else:
temp = N[r] / (right[r + 1] + left[j - r])
N[r] = saved + right[r + 1] * temp
saved = left[j - r] * temp
N[j] = saved
return N
def NodeVector(p, Q):
"""
准均匀B样条的节点向量计算
:param p: 基函数次数
:param Q: 数据点数组
:return: 节点矢量
"""
n = Q.shape[1] - 1
d = 0.0
for i in range(1, n + 1): # 计算总弦长
d += np.linalg.norm(Q[:, i] - Q[:, i - 1])
Q_parameterize = np.zeros(n + 1)
Q_parameterize[0] = 0
Q_parameterize[-1] = 1
for i in range(1, n):
Q_parameterize[i] = Q_parameterize[i - 1] + np.linalg.norm(Q[:, i] - Q[:, i - 1]) / d
m = n + p + 1
U = np.zeros(m + 1)
U[m - p:m + 1] = 1
for i in range(1, n - p + 1):
U[i + p] = np.sum(Q_parameterize[i:i + p]) / p
return Q_parameterize, U
def CurvePoint(p, U, P, u):
"""
计算 B 样条曲线上的点
:param p: 基函数次数
:param U: 节点矢量
:param P: 控制点
:param u: 固定值
:return: 固定值 u 在 B 样条曲线上的对应值
"""
N = BaseFunction(p, u, U)
span = FindSpan(p, u, U)
C = 0.0
for i in range(p+1):
C = C + N[i] * P[span - p + i]
return C
if __name__ == '__main__':
Q = np.array([[0, 3, -1, -4, -4, -2, -1], [0, 4, 4, 0, -3, -5, -7]])
Q_parameterize, NodeVector = NodeVector(3, Q)
A = np.zeros((Q.shape[1], Q.shape[1]))
for i in range(Q.shape[1]):
temp = BaseFunction(p=3, u=Q_parameterize[i], U=NodeVector)
span = FindSpan(p=3, u=Q_parameterize[i], U=NodeVector)
A[i, span - 3:span + 1] = temp
Px = np.linalg.solve(A, Q[0, :])
Py = np.linalg.solve(A, Q[1, :])
print(A)
print(Q[0, :])
print(Q[1, :])
u = np.linspace(0, 1, 1000)
x = np.zeros(1000)
y = np.zeros(1000)
for i in range(len(u)):
x[i] = CurvePoint(p=3, U=NodeVector, P=Px, u=u[i])
y[i] = CurvePoint(p=3, U=NodeVector, P=Py, u=u[i])
plt.plot(x, y, c='r')
for i in range(Q.shape[1]):
plt.plot(Q[0, i], Q[1, i], 'go', markerfacecolor='none')
plt.show()

















 6429
6429











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









