







考虑单轮纵向模型
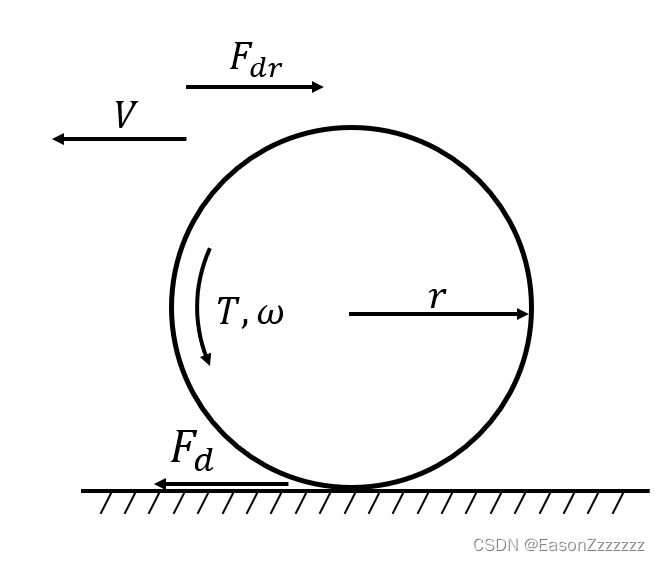
其动力学微分方程为
{
J
ω
ω
˙
=
T
−
r
F
d
M
V
˙
=
F
d
−
F
d
r
(1)
\begin{cases} J_\omega\dot{\omega}=T-rF_d\\\tag{1} M\dot{V}=F_d-F_{dr} \end{cases}
{Jωω˙=T−rFdMV˙=Fd−Fdr(1)
其中, J ω J_\omega Jω 为车轮转动惯量; ω \omega ω 为车轮角速度; T T T 为驱动力矩; F d F_d Fd 为车辆牵引力; r r r 为车轮半径; M M M 为车辆质量; V V V 为车辆纵向速度; F d r F_{dr} Fdr 为行驶阻力。
其中,车轮的线速度可以表示为:
V
ω
=
r
ω
(2)
V_\omega=r\omega\tag{2}
Vω=rω(2)
由式(1),可以计算得到牵引力:
F
d
=
T
−
J
ω
ω
˙
r
(3)
F_d=\frac{T-J_\omega\dot\omega}{r}\tag{3}
Fd=rT−Jωω˙(3)
由式(3)可以看出,驱动力矩
T
T
T 可以通过电机电流得到,车轮转动惯量
J
ω
J_\omega
Jω 和车轮半径
r
r
r 已知且为定值,因此可以简单地计算处牵引力
F
d
F_d
Fd 的大小。
并且可以看出,在汽车没有打滑的时候,当驱动力矩
T
T
T 增大或者车轮角加速度
ω
˙
\dot\omega
ω˙ 减小时,牵引力
F
d
F_d
Fd 随之増大。但是当车辆发生滑转时,牵引力大小等于车轮与路面之间可提供的最大摩擦力,且不再随着电机驱动扭矩的增大而増大。
也就是说,车辆一旦发生打滑,电机的过度驱动非但不能使车辆继续加速,反而会使得车辆打滑情况加剧。此时,我们需要及时发现这种情况,计算出各个时刻电机应该输出的最大驱动扭矩,以保证车辆的稳定性及加速性能。
当汽车即将或己经滑转时,车轮加速度的绝对值会大于底盘加速度,这将会导致轮速与底盘速度之间的差距越来越大,即滑转率会越来越大,车辆也就更加不稳定,易引发安全事故。
为简化问题,定义车身加速度与车轮加速度松弛因子,定义为底盘加速度与车轮加速度之比,
α
=
V
˙
V
˙
ω
=
V
˙
r
ω
˙
(4)
\alpha=\frac{\dot V}{\dot{V}_\omega}=\frac{\dot V}{r\dot\omega}\tag{4}
α=V˙ωV˙=rω˙V˙(4)
为保证汽车与路面之间的附着力尽可以大,松弛因子 α \alpha α 一般设定为小于且趋近于1的正常数。
由式(4)可知,当松弛因子
α
\alpha
α 已知,且车身加速度一定的时候,为防止车辆打滑,这时车轮角加速度必须限制在一定范围内,即
ω
˙
≤
ω
˙
max
=
V
˙
r
ω
˙
(5)
\dot{\omega}\leq\dot\omega_{\max}=\frac{\dot V}{r\dot\omega}\tag{5}
ω˙≤ω˙max=rω˙V˙(5)
假定某时刻,保证在某一路面行驶的汽车不打滑的最大驱动力矩为
T
max
T_{\max}
Tmax,根据式(1)可得到
J
ω
ω
˙
max
=
T
max
−
r
F
d
(6)
J_\omega\dot{\omega}_{\max}=T_{\max}-rF_d\tag{6}
Jωω˙max=Tmax−rFd(6)
则松弛因子可进一步表示为
α
=
V
˙
r
ω
˙
=
V
˙
(
T
max
−
r
F
d
)
r
J
ω
=
J
ω
V
˙
(
T
max
−
r
F
d
)
r
(7)
\alpha=\frac{\dot V}{r\dot\omega}=\frac{\dot V}{\dfrac{(T_{\max}-rF_d)r}{J_\omega}}=\frac{J_\omega\dot V}{(T_{\max}-rF_d)r}\tag{7}
α=rω˙V˙=Jω(Tmax−rFd)rV˙=(Tmax−rFd)rJωV˙(7)
因此,最大驱动力矩
T
max
T_{\max}
Tmax 可以表示为
T
max
=
r
F
d
+
J
ω
V
˙
α
r
=
T
−
J
ω
ω
˙
+
J
ω
V
˙
α
r
(8)
T_{\max}=rF_d+\frac{J_\omega\dot V}{\alpha r}=T-J_\omega\dot\omega+\frac{J_\omega\dot V}{\alpha r}\tag{8}
Tmax=rFd+αrJωV˙=T−Jωω˙+αrJωV˙(8)
由上式可知,如果驱动力一定,最大驱动扭矩 T max T_{\max} Tmax 只会随着车身加速度的增大而增大。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









