






ubuntu22.04安装参考:
ros2 humble安装参考:
https://fishros.com/d2lros2/#/humble/chapt1/get_started/3.%E5%8A%A8%E6%89%8B%E5%AE%89%E8%A3%85ROS2
创建ros2工作空间:
mkdir -p jtbot_ws/src
复制雷达厂家ros2代码到src文件夹下,编译好,启动雷达节点,终端输入。
ros2 launch lsm10_v2 ls_m10.launch.py
重新在启动一个终端启动riz2 输入:
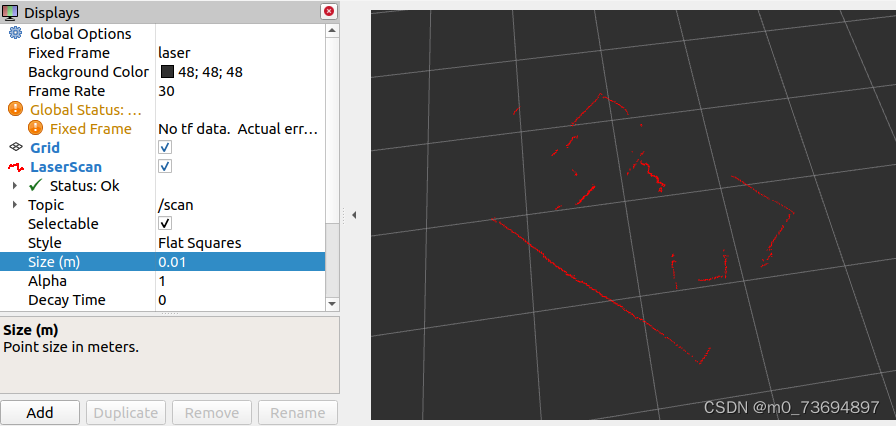
rviz2
Fix Frame选laser,显示效果















 726
726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









