






运行前提:
标定摄像头(如果只是想跑通程序,这步可以跳过,等程序跑通了回头在标定也行的)
ros1 noetic摄像头标定_JT_BOT的博客-CSDN博客
已经安装好orb_slam3,没有安装好可以参考我以前的安装过程
想学ORB_SLAM3,先从编译开始,编译通不过,一切都是浮云_JT_BOT的博客-CSDN博客
一 编辑yaml文件(此步骤如果只是为跑通程序可以跳过,用程序自带的yaml文件)
找到相机标定后生成的calibrationdata文件,在文件最后有2个文本文件,我这里的文本文件是
ost.txt和ost.yaml,如下图所示:

orb-slam3目录结构,在主目录内


在ORB_SLAM3内新建文件夹cam_slam3,把标定文件ost.yaml复制进此文件夹。
参考TUM1.yaml修改ost.yaml格式。

注意:ORB Parameters和Viewer Parameters下面的不需要修改
2.camera_matrix:
对应:
# Camera calibration and distortion parameters (OpenCV)
Camera1.fx:
Camera1.fy:
Camera1.cx:
Camera1.cy:
distortion_coefficients:[k1 k2 p1 p2 k3]
参数值对应。其中ORB参数与Viewer参数不变。
修改后的 ost.yaml
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
File.version: "1.0"
Camera.type: "PinHole"
# Camera calibration and distortion parameters (OpenCV)
Camera1.fx: 621.19783
Camera1.fy: 624.29785
Camera1.cx: 327.35984
Camera1.cy: 238.12506
Camera1.k1: 0.112341
Camera1.k2: -0.170053
Camera1.p1: -0.004971
Camera1.p2: 0.003109
Camera1.k3: 0.000000
# Camera frames per second
Camera.fps: 30
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Camera resolution
Camera.width: 640
Camera.height: 480
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500.0
在cam_slam3内新建cam_slam3.cpp
// cam_slam3.cpp
// 该文件将打开你电脑的摄像头,并将图像传递给ORB-SLAM3进行定位
// opencv
#include <opencv2/opencv.hpp>
// ORB-SLAM的系统接口
#include "System.h"
#include <string>
#include <chrono> // for time stamp
#include <iostream>
using namespace std;
// 参数文件与字典文件
// 如果你系统上的路径不同,请修改它
string parameterFile = "../ost.yaml";//这个文件如果没有可以用程序里面的yaml文件代替,比如TUM1.yaml
string vocFile = "../../Vocabulary/ORBvoc.txt";
int main(int argc, char **argv) {
// 声明 ORB-SLAM2 系统
ORB_SLAM3::System SLAM(vocFile, parameterFile, ORB_SLAM3::System::MONOCULAR, true);
// 获取相机图像代码
cv::VideoCapture cap(0); // change to 1 if you want to use USB camera.
// 分辨率设为640x480
cap.set(cv::CAP_PROP_FRAME_WIDTH, 640);;//设置采集视频的宽度
cap.set(cv::CAP_PROP_FRAME_HEIGHT, 480);//设置采集视频的高度
// 记录系统时间
auto start = chrono::system_clock::now();
while (1) {
cv::Mat frame;
cap >> frame; // 读取相机数据
auto now = chrono::system_clock::now();
auto timestamp = chrono::duration_cast<chrono::milliseconds>(now - start);
SLAM.TrackMonocular(frame, double(timestamp.count())/1000.0);
}
return 0;
}
CMakeLists.txt
# CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(cam_slam3)
find_package(OpenCV 4 REQUIRED) #opencv根据版本填写版本号
#包含头文件
include_directories(${OPENCV_INCLUDE_DIRS}
#非标准头文件包含写法,根据编译报错用: sudo find / -name System.h 搜每一个缺少的头文件路径添加在下面
~/ORB_SLAM3/include
~/ORB_SLAM3
/usr/include/eigen3
~/ORB_SLAM3/include/CameraModels
)
#生成可执行文件
add_executable(cam_slam3 cam_slam3.cpp)
#链接库文件
target_link_libraries(cam_slam3 ${OpenCV_LIBS}
#非标准的链接库文件写法,根据编译报错用:sudo find / -name libpangolin.so 搜缺少的库文件
#按绝对路径添加缺少的库文件
/usr/local/lib/libpangolin.so
/lib/x86_64-linux-gnu/libOpenGL.so.0
/lib/x86_64-linux-gnu/libGLEW.so.2.1
~/ORB_SLAM3/lib/libORB_SLAM3.so
)
文件结构
编译:
cd ORB_SLAM3/cam_slam3
mkdir build
cd build
cmake ..
make


编译完成 ./cam_slam3 运行单目程序
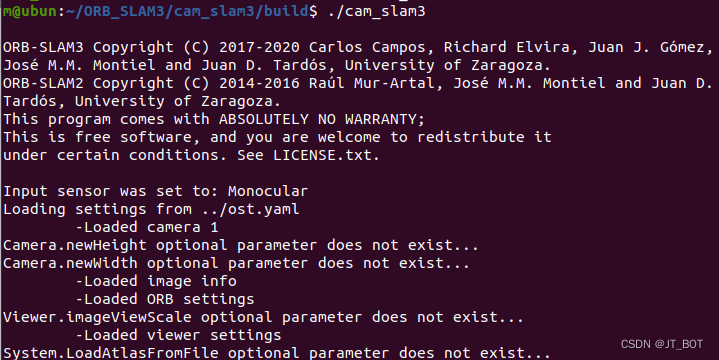

看到这个图像说明运行成功。
此实现难点在于编译,需要通过编译报错用 sudo find / -name 文件名 搜索缺少的头文件和库文件,通过不断调整CMakeLists.txt直至成功。
参考:















 4359
4359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









