







奥比中光astra pro用尽各种办法,采集不到彩色图,有能同时采集彩图和深度图的告诉兄弟一下,下面是我的装机过程:
在ros2 foxy版安装奥比中光Astra Pro RGBD深度像机_JT_BOT的博客-CSDN博客
不知道什么原因,用奥比中光的程序采集不了彩色图像只能采集深度图和红外图,只能改造ros自带的摄像头程序采集彩色图了。
安装foxy摄像头程序:
sudo apt install ros-foxy-usb-cam//foxy安装摄像头驱动sudo gedit /opt/ros/foxy/share/usb_cam/config/params.yaml
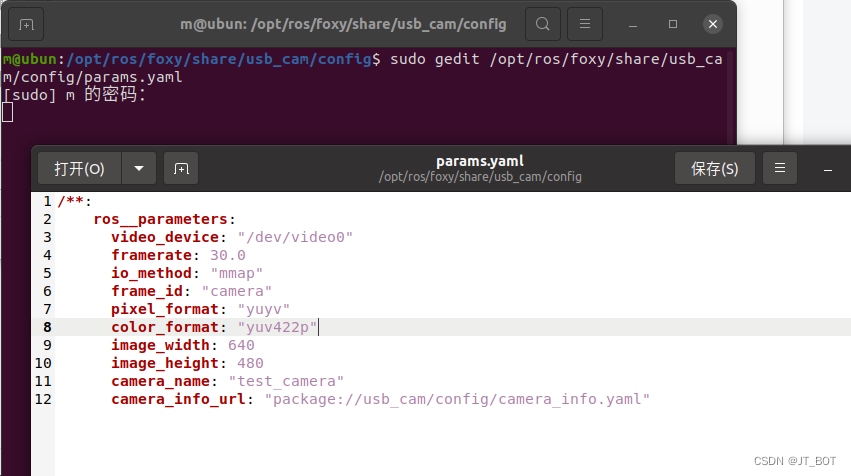
/dev/vedeo0 一般是笔记本摄像头
/dev/vedeo2 是外接奥比中光摄像头
改成 video_device: "/dev/video2"

保存退出
运行摄像头节点:
ros2 launch 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1228
1228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









