 三维应力敏感度分析:基于SIMP方法的拓扑优化与挑战
三维应力敏感度分析:基于SIMP方法的拓扑优化与挑战




 本文探讨了三维结构优化中的应力敏感度分析,结合有限元分析和p-范数方法,特别关注SIMP方法在处理应力约束的拓扑优化中的应用及其挑战,如奇异现象、局部应力计算和非线性行为。通过实例和Matlab代码展示了如何实施和验证这种方法。
本文探讨了三维结构优化中的应力敏感度分析,结合有限元分析和p-范数方法,特别关注SIMP方法在处理应力约束的拓扑优化中的应用及其挑战,如奇异现象、局部应力计算和非线性行为。通过实例和Matlab代码展示了如何实施和验证这种方法。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
摘要
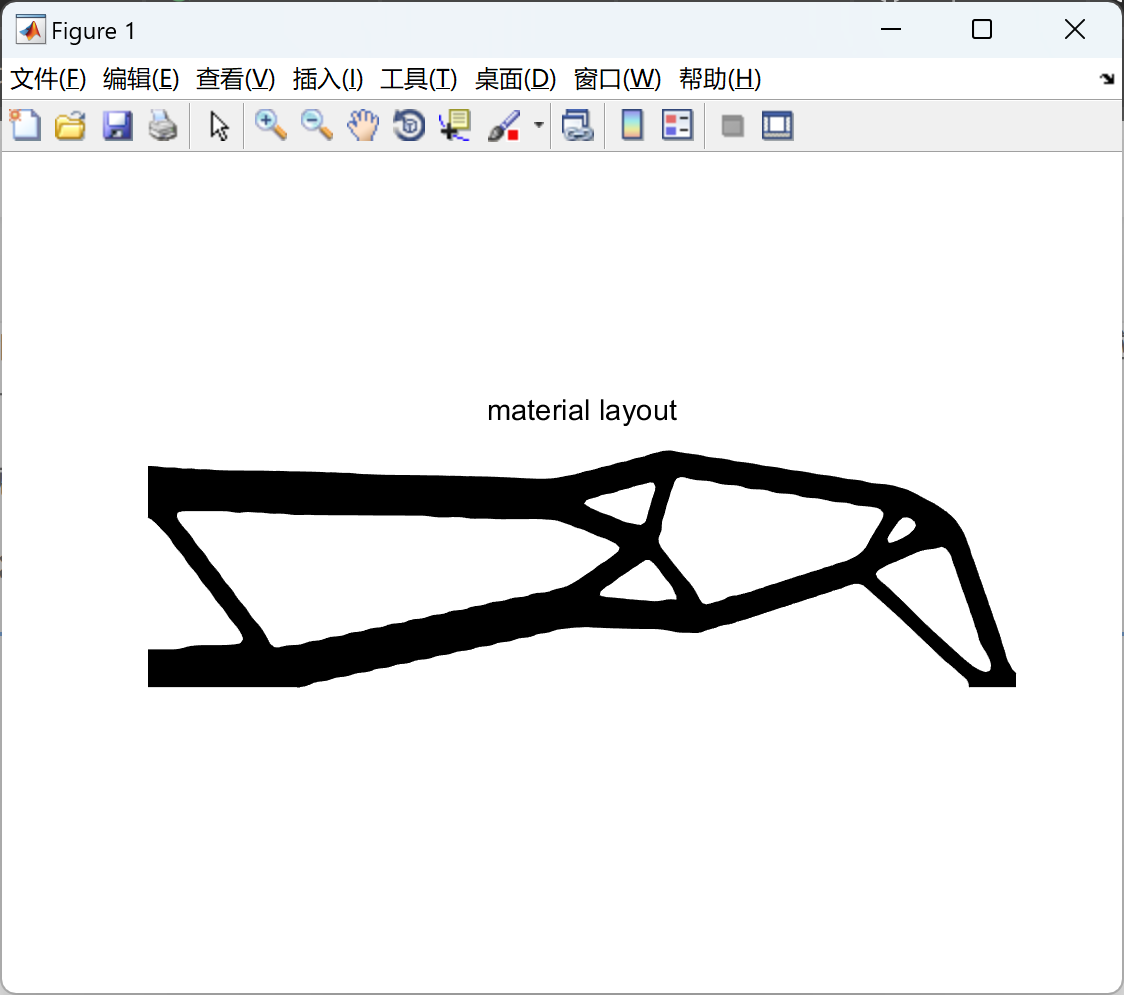
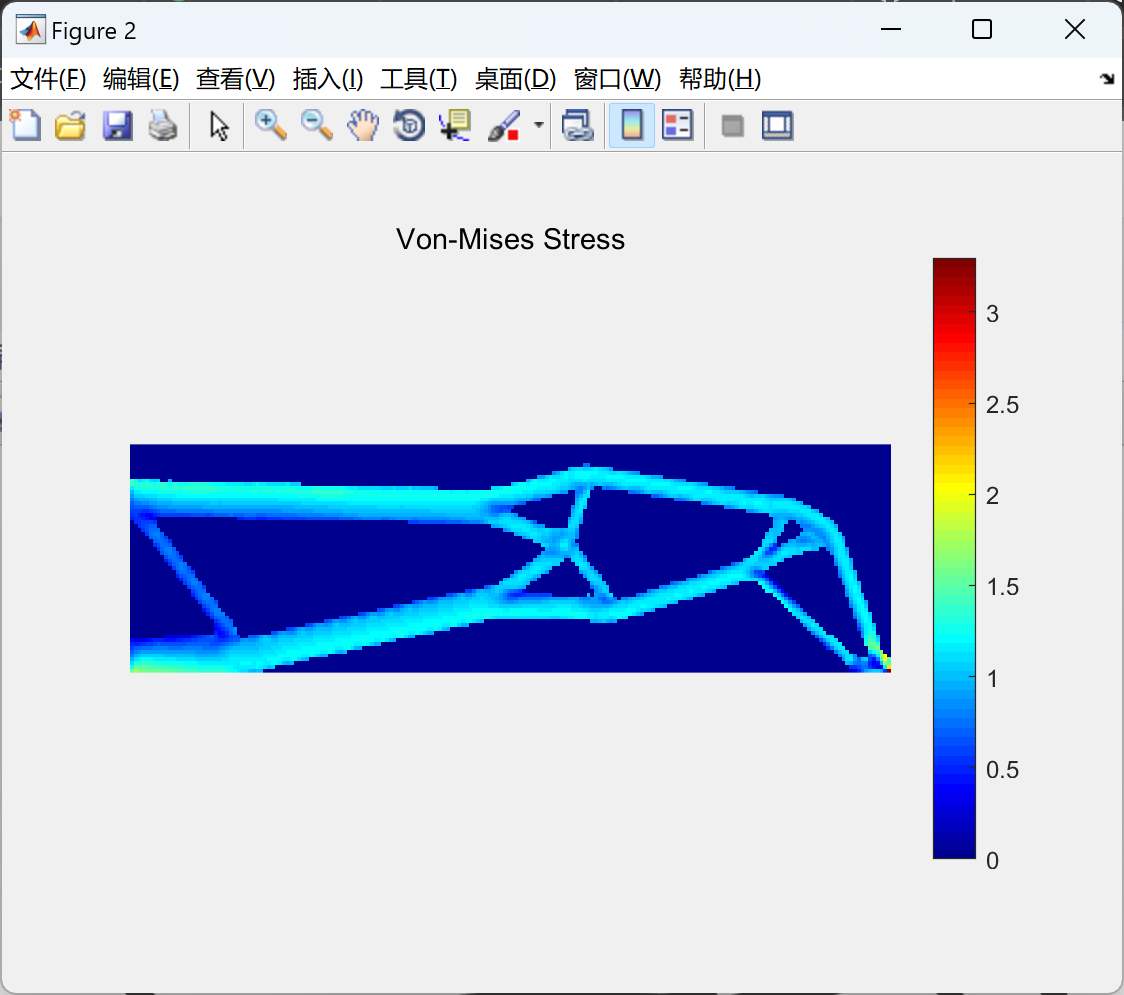
本文用于三维基于应力的敏感度分析。包括基于伴随方法的有限元分析和p-范数应力敏感度分析。详细介绍了基于p-范数全局应力衡量的3D敏感度分析。通过与有限差分逼近的比较,验证了分析敏感度的正确性。非线性优化求解器选择了移动渐近线法(MMA)。为验证敏感度分析代码的有效性,提出了三个典型的体积约束应力最小化问题。本文可以扩展到解决不同与应力有关的3D拓扑优化问题。
随着计算资源和先进制造技术的提高,拓扑优化(Topology Optimization, TO)等结构优化工具在设计过程中的作用越发重要。TO最早由Bendsoe和Kikuchi于1988年提出,用于确定代表几何结构中材料分布的设计变量的理想值,通常为刚度。优化后的刚度设计可制造出在工业应用中吸引人的复杂、有机和轻量化的设计。然而,这些设计容易产生应力集中,可能导致设计在使用中出现问题。因此,在工业应用中,必须将应力约束包括在TO中,以确保最佳设计满足所有工程要求,且不会大幅偏离最初优化的结果。正如Le等人在2010年指出的,实施应力约束面临三大挑战:"奇异"现象(Duysinx和Bendsøe 1998)、应力作为局部结果以及应力的非线性。
许多论文讨论了奇异现象(Guo等,2011;Paris等,2010;Cheng和Guo,1997;Kirsch,1990;Luo等,2013;Xia等,2012,2018;Zhang等,2013;Fan等,2019;Deng等,2020a, 2019, 2020b;Deng和To,2020),即低密度设计变量仍具有应变值,导致人为生成的应力值过大,复杂化优化过程。为解决这一挑战,人们开发了不同的方法。Cheng和Guo(1997)采用应变放松方法缓解这些低密度元素中的应变。Bruggi(2012)、Le等人(2010)和Holmberg(2013)对基于密度变量的应力进行惩罚。这三个研究都使用了固体各向同性材料加惩罚(SIMP)方法,将每个密度变量表示为1到0之间的连续值。Xia等人(2018)通过使用双向进化结构优化(BESO)方法避免了奇异性问题。BESO方法将每个变量离散表示为1或0,代表实体或空白材料,消除了中间值和中间值带来的奇异性。据指出,另一种TO方法——水平集方法也解决了受应力约束的TO问题(Guo等,2011;Xia等,2012, 2014;Zhang等,2013;Wang和Li,2013;Allaire和Jouve,2008;Suresh和Takalloozadeh,2013;James等,2012;Miegroet和Duysinx,2007;Allaire等,2014;Picelli等,2018a, 2018b;Emmendoerfer和Fancello,2016;Kambampati等,2020;Song等,2020;Yang等,2018)。水平集方法也像BESO一样离散表示材料,并且避免了奇异现象。其他关于应力相关拓扑优化的先进方法可以在文献中找到(Zhang等,2017, 2016, 2018;Cai和Zhang,2015)。然而,本文将着重介绍基于应力的拓扑优化中SIMP方法的实施。第二个挑战在于应力是在每个元素上局部计算的。正如Duysinx和Bendsoe(Duysinx和Bendsøe,1998)所述,这就需要为每个元素设置一个约束,并增加计算问题所需的计算资源。相比之下,Dusyinx和Sigmund(Duysinx和Sigmund,1998)引入了全局应力约束,将所有局部应力归为一种度量。然而,全局约束不能很好地控制局部应力行为。因此,Paris等人(2009)、Le等人(2010)和Holmberg等人(2013)提出了区域方法。这些方法根据附近元素或按照排序后的应力值分组元素约束。研究发现,区域方法是一个令人满意的折衷方案,可以限制约束的数量,同时仍然提供良好的局部应力控制。第三个挑战在于应力的非线性行为。元素应力的测量受到了该元素局部邻域中密度的极大影响。因此,Le等人(2010)使用密度变量滤波器来平滑密度变量和敏感度,通过对相邻节点进行加权平均,消除了先前拓扑优化算法中的棋盘效应,产生了平滑设计,并更好地收敛到全局最小值。
详细文章见第4部分。
📚2 运行结果
部分代码:
function[residu,residunorm,residumax] = ...
kktcheck(m,n,x,y,z,lam,xsi,eta,mu,zet,s, ...
xmin,xmax,df0dx,fval,dfdx,a0,a,c,d);
%
% The left hand sides of the KKT conditions for the following
% nonlinear programming problem are calculated.
%
% Minimize f_0(x) + a_0*z + sum( c_i*y_i + 0.5*d_i*(y_i)^2 )
% subject to f_i(x) - a_i*z - y_i <= 0, i = 1,...,m
% xmax_j <= x_j <= xmin_j, j = 1,...,n
% z >= 0, y_i >= 0, i = 1,...,m
%*** INPUT:
%
% m = The number of general constraints.
% n = The number of variables x_j.
% x = Current values of the n variables x_j.
% y = Current values of the m variables y_i.
% z = Current value of the single variable z.
% lam = Lagrange multipliers for the m general constraints.
% xsi = Lagrange multipliers for the n constraints xmin_j - x_j <= 0.
% eta = Lagrange multipliers for the n constraints x_j - xmax_j <= 0.
% mu = Lagrange multipliers for the m constraints -y_i <= 0.
% zet = Lagrange multiplier for the single constraint -z <= 0.
% s = Slack variables for the m general constraints.
% xmin = Lower bounds for the variables x_j.
% xmax = Upper bounds for the variables x_j.
% df0dx = Vector with the derivatives of the objective function f_0
% with respect to the variables x_j, calculated at x.
% fval = Vector with the values of the constraint functions f_i,
% calculated at x.
% dfdx = (m x n)-matrix with the derivatives of the constraint functions
% f_i with respect to the variables x_j, calculated at x.
% dfdx(i,j) = the derivative of f_i with respect to x_j.
% a0 = The constants a_0 in the term a_0*z.
% a = Vector with the constants a_i in the terms a_i*z.
% c = Vector with the constants c_i in the terms c_i*y_i.
% d = Vector with the constants d_i in the terms 0.5*d_i*(y_i)^2.
%
%*** OUTPUT:
%
% residu = the residual vector for the KKT conditions.
% residunorm = sqrt(residu'*residu).
% residumax = max(abs(residu)).
%
rex = df0dx + dfdx'*lam - xsi + eta;
rey = c + d.*y - mu - lam;
rez = a0 - zet - a'*lam;
relam = fval - a*z - y + s;
rexsi = xsi.*(x-xmin);
reeta = eta.*(xmax-x);
remu = mu.*y;
rezet = zet*z;
res = lam.*s;
%
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

















 630
630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









