







一、问题
如题,要进行一个大场景的3DGS重建,数据集来自于某工地现场(大约3000张照片),数据集拍摄于同一个相机,按照国际惯例,3DGS需要输入一个稀疏点云,所以首先利用colmap进行稀疏重建。
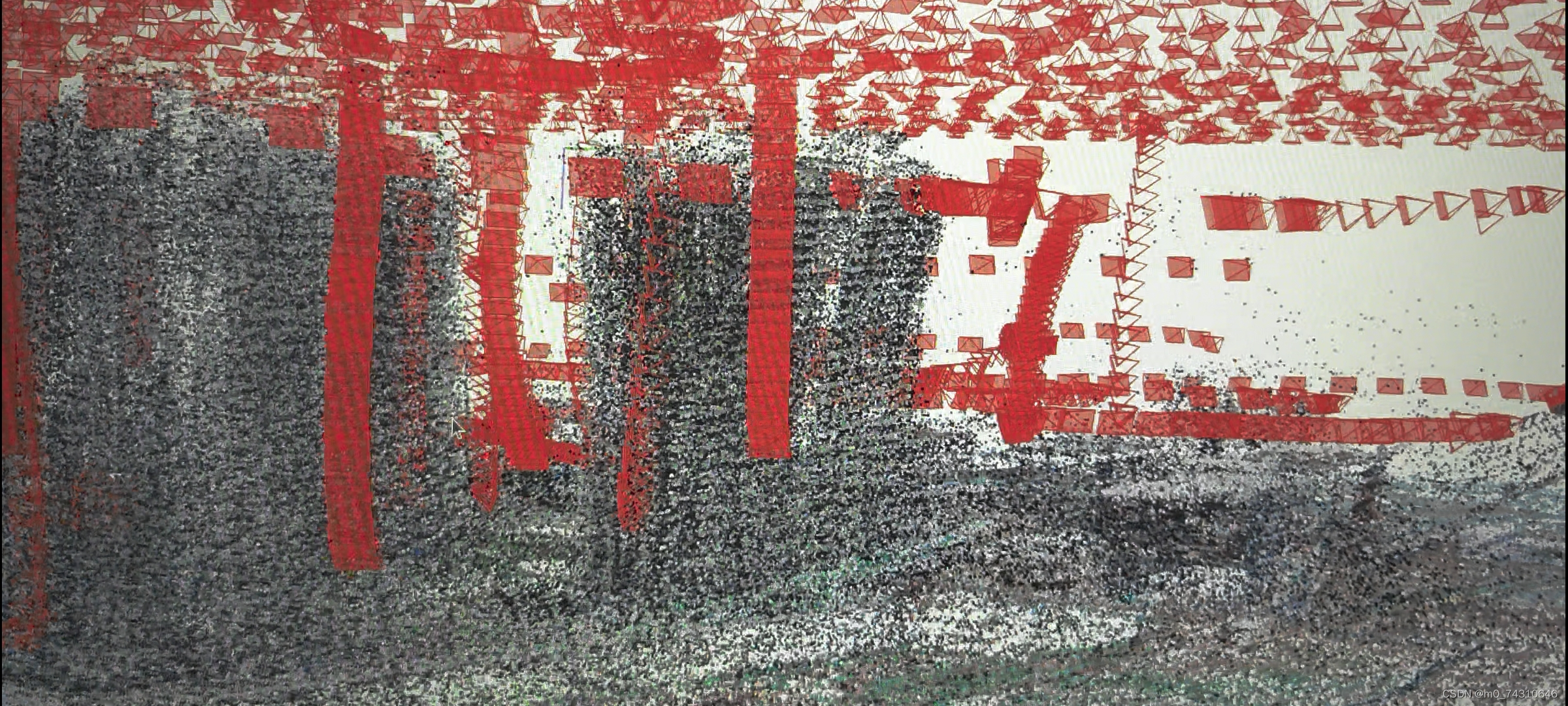
进行特征提取,特征匹配(colmap官网建议1000-10000张图的特征匹配使用vocab tree),稀疏重建以后,发现场景中,楼宇出现弯曲,分裂现象,如下图:

 问题出现以后,查看(在colmap gui界面双击)弯曲部分对应的照片,楼宇上下拍摄角度的照片并没有发现畸变(楼宇是直的,简单的用尺子或者其他工具对比一下,楼宇是否有弯曲)
问题出现以后,查看(在colmap gui界面双击)弯曲部分对应的照片,楼宇上下拍摄角度的照片并没有发现畸变(楼宇是直的,简单的用尺子或者其他工具对比一下,楼宇是否有弯曲)

从拍摄的照片来看,虽然是对着楼宇上下拍摄,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 307
307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









