







 文章讨论了CMakeLists.txt在ROS中的作用,区分于vanillaMakefile,强调了在Python中的应用,涉及NodeHandle在ROS中的使用、rospy.init_node的功能,以及spinOnce和spin的区别,同时提到了bag文件的保存与管理。
文章讨论了CMakeLists.txt在ROS中的作用,区分于vanillaMakefile,强调了在Python中的应用,涉及NodeHandle在ROS中的使用、rospy.init_node的功能,以及spinOnce和spin的区别,同时提到了bag文件的保存与管理。
第一次
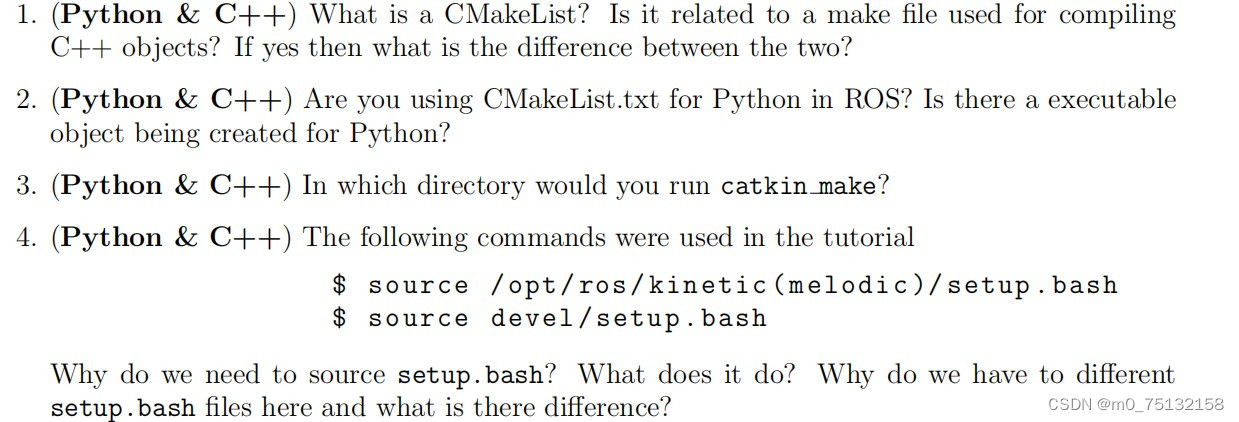 1.问:什么是CMakeList?它是否与用于编译c++对象的make文件有关?如果是,那么两者之间的区别是什么?
1.问:什么是CMakeList?它是否与用于编译c++对象的make文件有关?如果是,那么两者之间的区别是什么?
答:文件CMakeLists.txt是用于构建软件包的 CMake 构建系统的输入。任何符合 CMake 的包都包含一个或多个CMakeLists.txt文件,用于描述如何生成代码以及将其安装到何处。用于catkin项目的CMakeLists.txt文件是标准的vanilla CMakeLists.txt文件,具有一些附加约束。
rosbuild/CMakeLists - ROS Wiki
2.问: 您是否在ROS中使用CMakeList.txt用于Python ?是否为Python创建了可执行对象?
答: ROS中可以在CMakeLists.txt中配置Python和C++的可执行文件
rosbuild/CMakeLists - ROS Wiki
3.问:在哪个目录下运行catkin make?
答:需要在工作空间的根目录下使用catkin_make命令
catkin/commands/catkin_make - ROS Wiki
4.问:为什么我们需要源代码setup.bash?它是做什么的?为什么我们有不同的setup.bash设置和它们的区别是什么?
答:构建工作区后,会在 devel 子文件夹中创建一个类似于 /opt/ros/$ROSDISTRO_NAME 下的结构。编译完成后,在devel
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









