







目录
7 KD树 KdTree
7.1 基本原理
KD树,在k维空间中组织点云的数据结构,是一种二叉搜索树(对于3维点云,k=3)。可用于最近邻的搜索。KD树包括构建阶段和搜索阶段。
参考:KD树简介
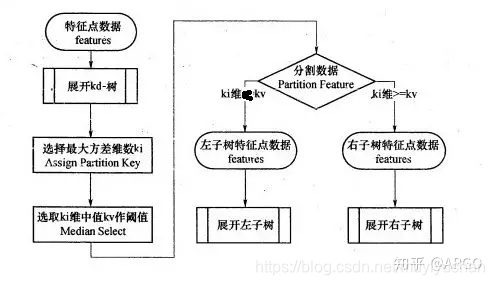
- 构建阶段:即对空间的切分,每轮切分按照一定原则先后切分k个维度。切分域(维度)的先后顺序可以根据方差(空间点的分布)确定,切分点选择中间点即可。
切分域的选择不一定用方差方式,可以简单的d mod n维度方式,d是树节点深度,n代表维度数量。该方法简单,效果也不错。
- 搜索阶段:1)寻找目标数据的近似最近点,即根据目标数据从根节点开始搜索kd树,找到对应的叶子节点作为近似最近点。2)回溯,沿着搜索路径回溯,以目标数据和近似最近点的距离作为判断依据,看看有无更近的点。
7.2 代码
//头文件
#include <pcl/kdtree/kdtree_flann.h>
...
// 定义KdTree对象
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
// 设置输入
kdtree.setInputCloud (cloud);
// 搜索点
pcl::PointXYZ searchPoint;
// 近邻点数目
int K = 10;
// 近邻点搜索和距离
std::vector<int> pointIdxNKNSearch(K);
std::vector<float> pointNKNSquaredDistance(K);
// 搜索K近邻 (nearestKSearch),若多于0个,打印出来
if ( kdtree.nearestKSearch (searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0 )
{
for (std::size_t i = 0; i < pointIdxNKNSearch.size (); ++i)
std::cout << " " << (*cloud)[ pointIdxNKNSearch[i] ].x
<< " " << (*cloud)[ pointIdxNKNSearch[i] ].y
<< " " << (*cloud)[ pointIdxNKNSearch[i 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2199
2199











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









