






cartographer 学习
编译并运行代码
由于cartographer整体分成了两个包
- 一个是cartographer,不带ros的内容
- 另一个是cartographer_ros,是已ros项目构建的
这样因为带了普通cmake的包,就没法使用catkin_make了,只能使用catkin_make_isolated
编译:catkin_make_isolated --install --use-ninja
catkin_make_isolated会生成三个目录:
- build_isolated
- devel_isolated
- install_isolated
其中所有的launch文件会被复制一份到install_isolated的share中。
也就是修改cartographer_ros中的launch文件,需要再编译一次才会生效(这里编译其实就是再拷一份文件),而catkin_make修改launch文件是不需要重新编译的
编译后source一下对应目录,然后启动就好了:
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
启动demo的launch文件分析
demo_backpack_2d.launch
<launch>
<param name="/use_sim_time" value="true" />
<include file="$(find cartographer_ros)/launch/backpack_2d.launch" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />
</launch>
param是设置参数服务器,/use_sim_time设置成true是播放bag是使用仿真时间include是添加其它的launch配置文件node是启动节点,启动了rviz,并且required="true"是必须要启动成功,如果rviz节点无法正常启动,launch文件将会终止运行并报错。-d设置rviz的配置文件- 还启动了
playbag节点,用于播放包,其中参数$(arg bag_filename)是执行roslaunch时指定的
backpack_2d.launch
<launch>
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/backpack_2d.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename backpack_2d.lua"
output="screen">
<remap from="echoes" to="horizontal_laser_2d" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
- 设置了参数
robot_description,值是文本文件,这个参数用于提供机器人的URDF描述。 - 运行了节点
robot_state_publisher,用于将机器人的关节状态发布为tf变换。 - 运行了节点
cartographer_node,输入参数给了一个lua配置文件 <remap>标签用于重新映射节点的话题,将echoes话题重映射为horizontal_laser_2d话题。这样订阅echoes可以很方便的更改为horizontal_laser_2d而不需要重新编译- 运行了节点
cartographer_occupancy_grid_node用来生成占据网格地图,设置了参数resolution,网格分辨率是0.05m
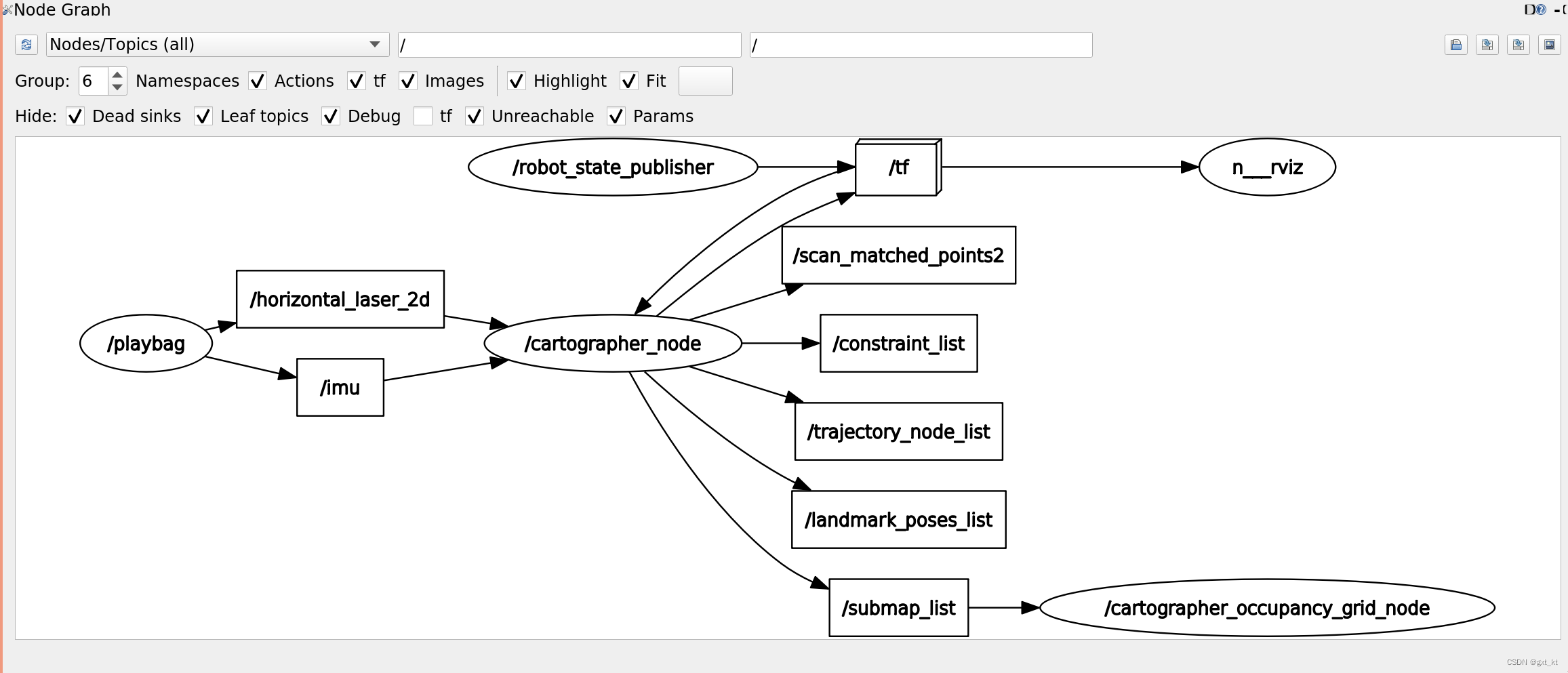
查看相应信息
使用rqt_graph可以查看节点连接情况
使用gflag库读取输入参数
GFlag库是Google开发的一个命令行参数解析库,它提供了一种方便的方式来定义和解析命令行参数。它的实现原理涉及到解析命令行参数、存储参数值以及提供访问参数值的接口。
总共分成几步:
- 使用
DEFINE_type定义好变量和类型,默认值,解释 - 将
argc/argv传入解析内容,gflags::ParseCommandLineFlags(&argc, &argv, true); - 执行可执行文件并传入参数
./my_program --verbose --count=10 - 使用参数是大写的
FLAGS_+对应的变量名,比如FLAGS_verbose
下面是一个简单的使用示例:
#include <gflags/gflags.h>
#include <iostream>
DEFINE_bool(verbose, false, "Enable verbose output");
DEFINE_int32(count, 0, "Number of iterations");
int main(int argc, char* argv[]) {
// 初始化GFlag库
gflags::ParseCommandLineFlags(&argc, &argv, true);
// 使用定义的命令行参数
if (FLAGS_verbose) {
std::cout << "Verbose output enabled" << std::endl;
}
std::cout << "Running " << FLAGS_count << " iterations" << std::endl;
// 其他代码...
return 0;
}
运行和输出是:
$ ./my_program --verbose --count=10
Verbose output enabled
Running 10 iterations















 7270
7270











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









