







 超级会员免费看
超级会员免费看
1、需要先下载LGSVL 工具包,解压后打开软件,点击打开浏览器;注意:需要先在LGSVL官网进行注册,并且将需要用到的车辆以及地图加载到库中。

官网地址:
https://wise.svlsimulator.com/maps/public
软件包快速下载地址:
https://download.csdn.net/download/nn243823163/85691557?spm=1001.2014.3001.5503
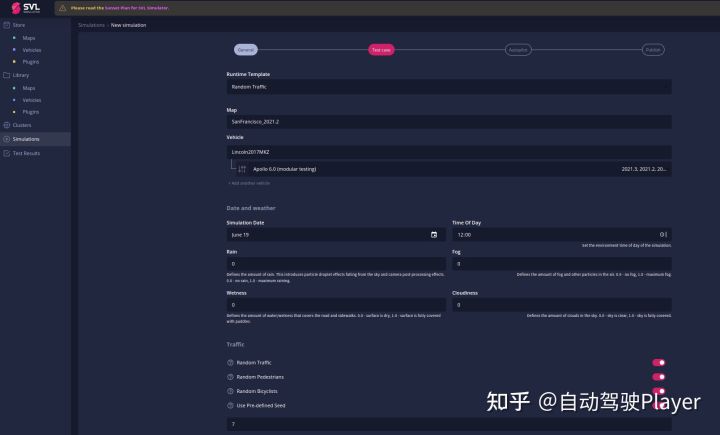
2、在LGSVL中配置生成仿真测试case,建议按照以下方式进行配置:
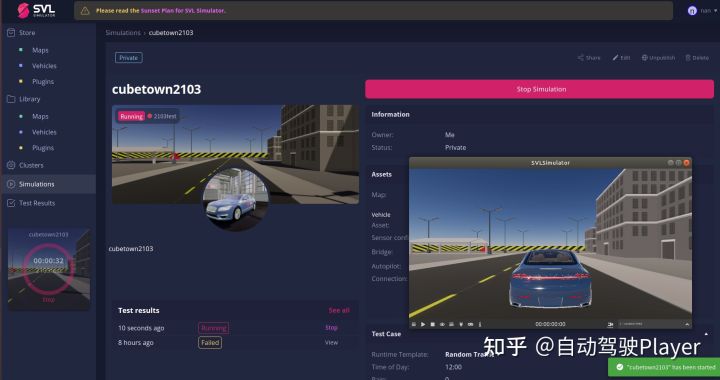
3、在LGSVL界面中点击 运行仿真case:
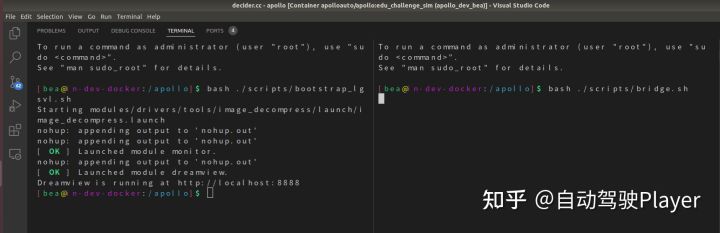
4、启动dreamview 以及 bridge
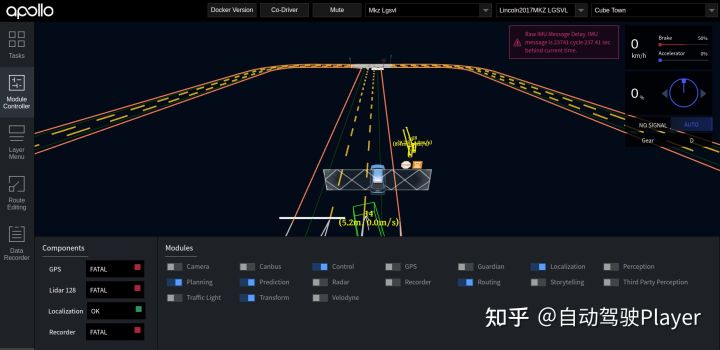
5、打开dreamview,选择对应地图,启动以下模块:
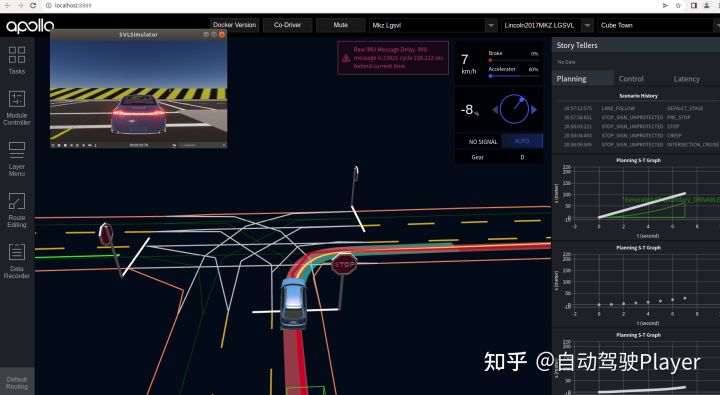
6、接下来便可以进行联合仿真
系列文章推荐:
Apollo Planning决策规划算法代码详解 (22):决策规划算法最完整介绍_自动驾驶Player的博客-CSDN博客_apollo planning
Apollo Planning决策规划算法代码详细解析 (1):Scenario选择_自动驾驶Player的博客-CSDN博客_apollo决策算法
自动驾驶算法详解(6):Astar算法原理以及路径规划应用在python与ros平台实现_自动驾驶Player的博客-CSDN博客
















 4806
4806











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











