







基础介绍
关于官方文档中对正逆运动学的讲解可参考博主罗伯特祥:https://blog.csdn.net/weixin_43455581/article/details/99102542
问题解答
下面就我在编写正逆运动学时遇到的一些问题进行总结:
1.为什么要使用正逆运动学?
对于开发机械臂来说,正向运动学可以由输入的各个关节角得出机械臂末端对应的XYZABC姿态,逆向运动学可以由机械臂末端反向计算出各个关节角对应的角度。道理大家都懂,那么在pmac的开发中,其正逆运动学在电机的实际控制过程中都起着什么作用呢。
前期开发,所用的软件为Power PMAC IDE,按照学习流程,应该在成功和电机实现通信和点动控制后,编写简单的运动程序,也就是Motion Programs中的prog.pmc,我这里简单编写的程序为:
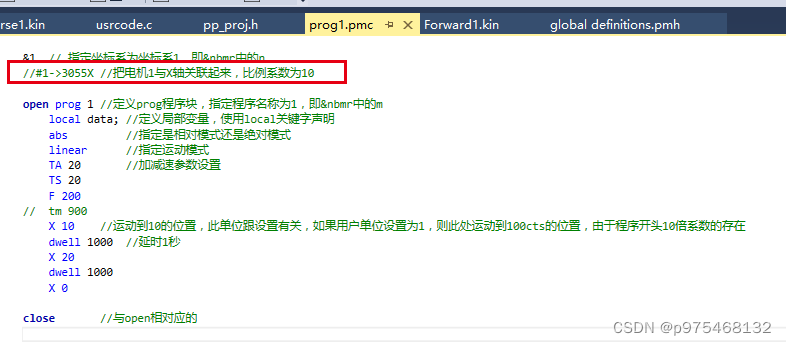
&1 // 指定坐标系为坐标系1,即&nbmr中的n
#1->3055X //把电机1与X轴关联起来,比例系数为3055
open prog 1 //定义prog程序块,指定程序名称为1,即&nbmr中的m
local data; //定义局部变量,使用local关键字声明
abs //指定是相对模式还是绝对模式
linear //指定运动模式
TA 20 //加减速参数设置
TS 20
F 200
// tm 900
X 10 //运动到10的位置,此单位跟设置有关,如果用户单位设置为1,则此处运动到100cts的位置,由于程序开头10倍系数的存在
dwell 1000 //延时1秒
X 20
dwell 1000
X 0
close //与open相对应的
程序里的比例3055是这么得出的:电机转一圈的编码器对用读书为1100000,那么每一度也就对应着1100000/360=3055个ct,1100000是这么计算得:假如你的电机减速比为100,编码器分辨率为1024,那么减速器输出一圈就为102400cts。
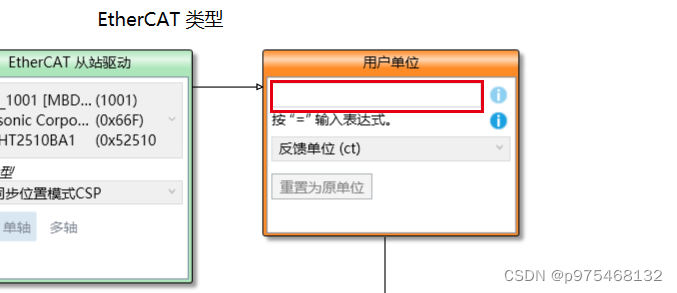
电机配置拓扑图里,不建议直接更改用户单位为3055,容易造成危险。这里默认为1。
到此为止,通过调整电机与X轴的比例系数,以及程序中的进给速度F,就可以简单的实现通过运动程序对电机进行控制。
2.正向运动学
下面,开始编写简单的正逆运动学(博主初期调试硬件只有一个总线电机):
正向运动学程序Forward1.kin为:
&1
open forward (1)
if(KinVelEna) callsub 100;
KinAxisUsed=$40
N100:
//resolution1=3055
theta1=KinPosMotor1/resolution1*2*pi;
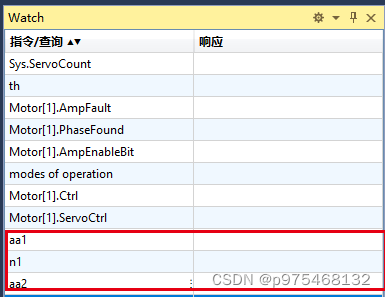
aa1=KinPosMotor1;//通过aa1的值来监测电机的实际编码器的读数
n1=n1+1;//n1用来在监测窗口观察正向运动学的运行次数
px=0.1*theta1;//这里将电机转动角和其对应的X轴的值简单的引入了0.1倍的关系,也就是说如果X=10,那么theta1=100°
KinPosAxisX=px;
aa2=KinPosAxisX;//aa2用来监测X轴的值
return;
close
编写完正向运动学,就可以开始验证正运动学,首先#1j/使能电机后,令j=0(目的是,如果你的电机当前值与运动程序中的第一条位置指令,也就是X10相差很大的话,电机会以很快的速度跑至X10,另外全程电机拓扑图里用户单位均为1,中途更改回引起电机剧烈震动,报警),然后终端输入&1b1r,这时会观察到n1由0->1,说明正向运动学运行一次,然后aa1和aa2也会有相应的值。
另外一种调用正向运动学的方法为:pmatch命令
比如你输入j=100,然后输入pmatch,这时会计算j=100处的正向运动学结果。
这里正向运动学的作用为:起到反馈作用,计算运动程序开始时,当前电机编码器所对应的末端X的值。
3.逆向运动学
接下来编写逆向运动学:
初学者可能会想,我现在没有逆向运动学,我的运动程序也能按照我的想法进行运动呀,其实是因为,你的运动程序中这一行命令:#1->3055X //把电机1与X轴关联起来,比例系数为3055,这也就意味着你的电机与X轴是一个线性关系,这种情况下没有逆运动也没什么问题,那如果你控制的是一个6轴的串联机械臂呢,这时它末端的XYZABC与各个电机之间就不再是线性关系,而要经过很复杂的运算,你的运动程序中的X10,X20这些命令就需要逆运动学来计算了。
接下来,注释掉#1->3055X //把电机1与X轴关联起来,比例系数为3055这条命令,我们用逆运动学来将X10、X20与电机对应起来,此时的运动程序应如图所示:
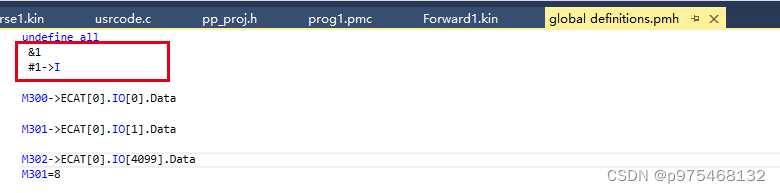
同时,在头文件里写入#1->I,将电机1用于逆运动学计算,我编写的简单逆运动学程序为:
&1
open inverse (1)
x_i=KinPosAxisX;
theta1_i=x_i*10;//与正向运动学中的0.1求逆
KinPosMotor1=theta1_i*resolution1/2/pi;//将X对应的角度转换为电机编码器值
P1300=KinPosMotor1;//P1300用来在监视窗口观察电机编码器数值
n2=n2+1;//n2用来在watch窗口观察逆运动学计算了多少次
close
到此为止,一个对应着一个电机的简单正逆运动学就都编写完了,此时再次#1j/使能电机,j=0,&1b1r运行运动程序1,会观察到watch窗口中n2会一直在快速上涨,也就是说在运动程序执行过程中,一直在实时计算逆运动学。相信到了这一步,应该对正逆运动学有了初步的了解,单电机跑通后,可以用虚拟轴的方法,来验证6轴串联机械臂的正逆运动学。















 3444
3444











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









