






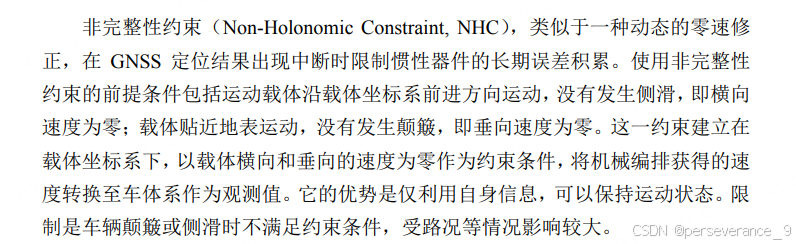
1.NHC的概念
2.NHC方程推导
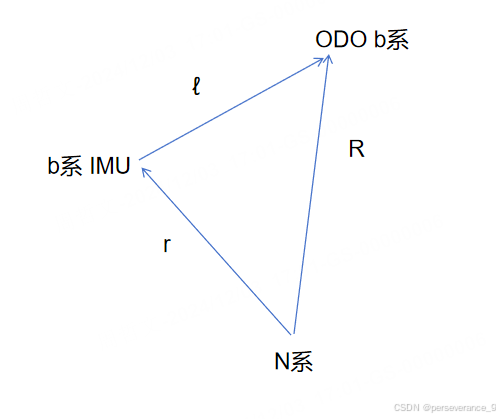
以上图为例,上图的字母为向量形式:
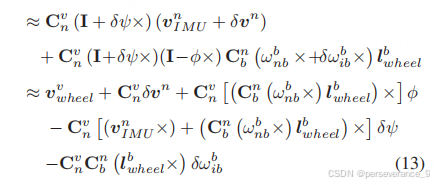
按照哥式定理:
由N系转换到V(安装坐标系)后可得:
![]()
3.NHC与INS组合的观测方程设计
对上式做扰动分析:
则量测方程可得:
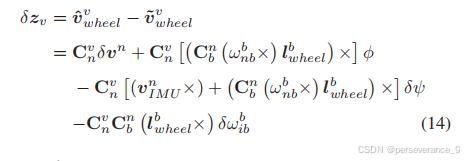
在实际的滤波中可以忽略掉可以安装角误差,因为安装角的误差并不是状态估计参数

















 2210
2210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









