







SINS/NHC组合导航(一)
前言
一般在车载SINS/GNSS组合导航中,为了提升GNSS失锁性能,可以采用融合车辆运动学约束条件辅助的组合导航算法,利用车辆正常行驶中横向和纵向速度为零的约束条件,可以提升导航算法能力。本文初步实现了SINS/NHC算法,并利用开源组合导航数据做了算法的验证。
数据
武汉大学开源组合导航数据
数据链接如上,IMU型号为ICM20602,属于消费级IMU,云汉芯城的芯片价格如下,单片价格在60元左右。

SINS/NHC基本原理
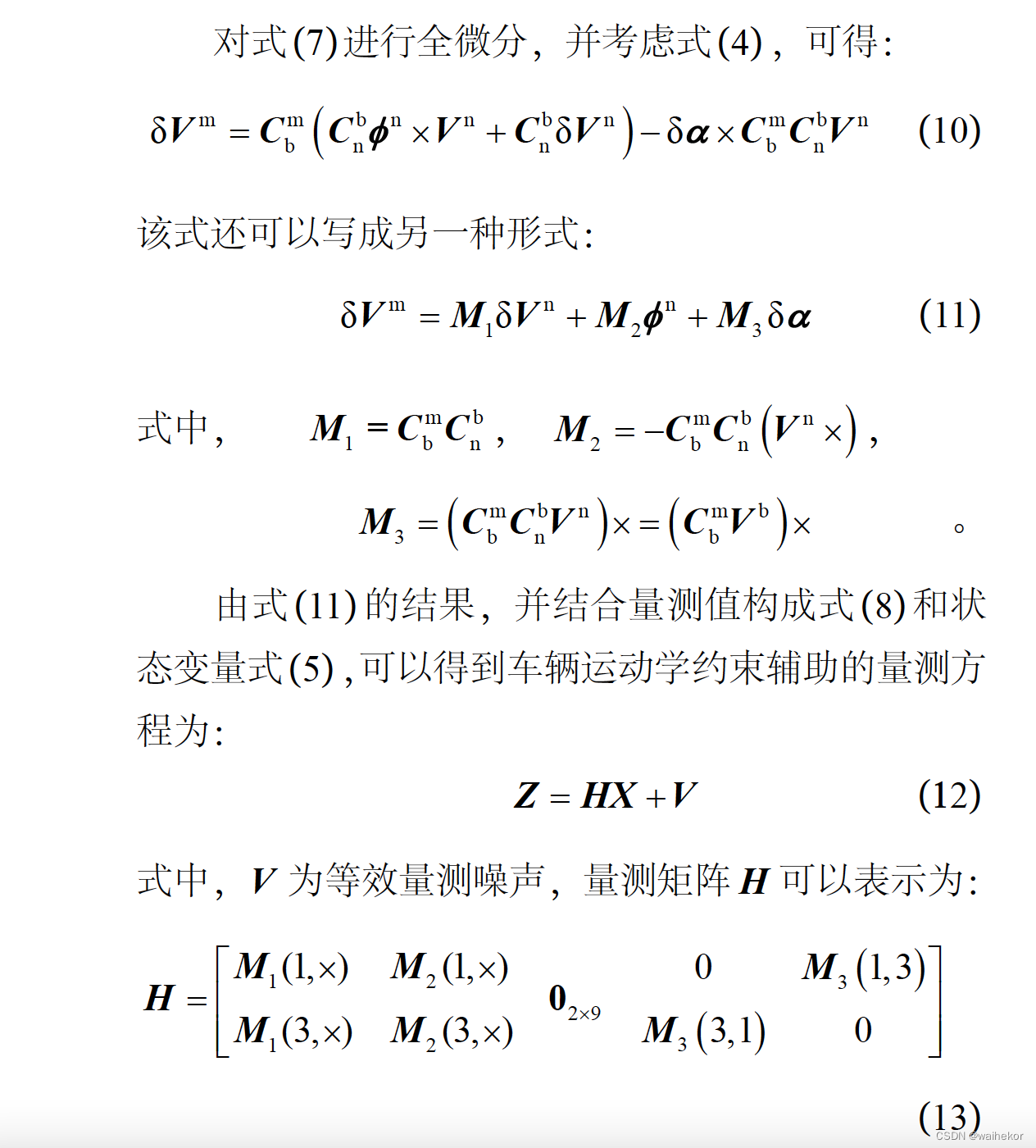
相关推导可以参考西工大付强文老师的论文《车辆运动学约束辅助的惯性导航算法》,在论文推导中,量测矩阵与三个状态向量有关,分别为M1:与速度误差相关的量测,M2:与失准角相关的量测,M3:有安装误差(惯导和车辆之间的安装误差)相关的量测。一般M1和M2是必须包含的,M3与估计的精度有关,一般可以事先标定出来。
数据验证与分析
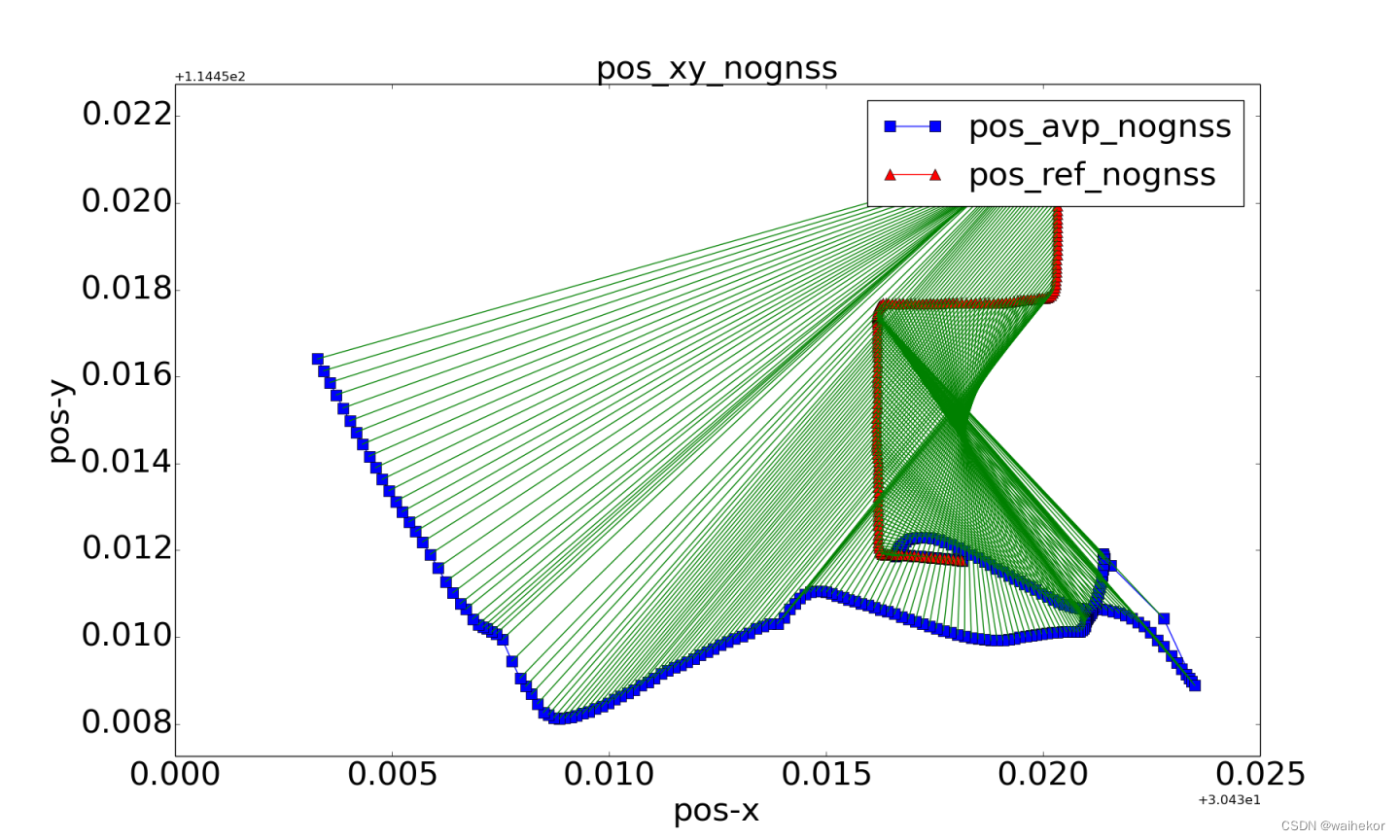
下面是部分数据结,失锁时间为240s:
纯SINS
总里程为1.87km,最终误差为45.8%dt。
M1和M2(SINS/NHC):
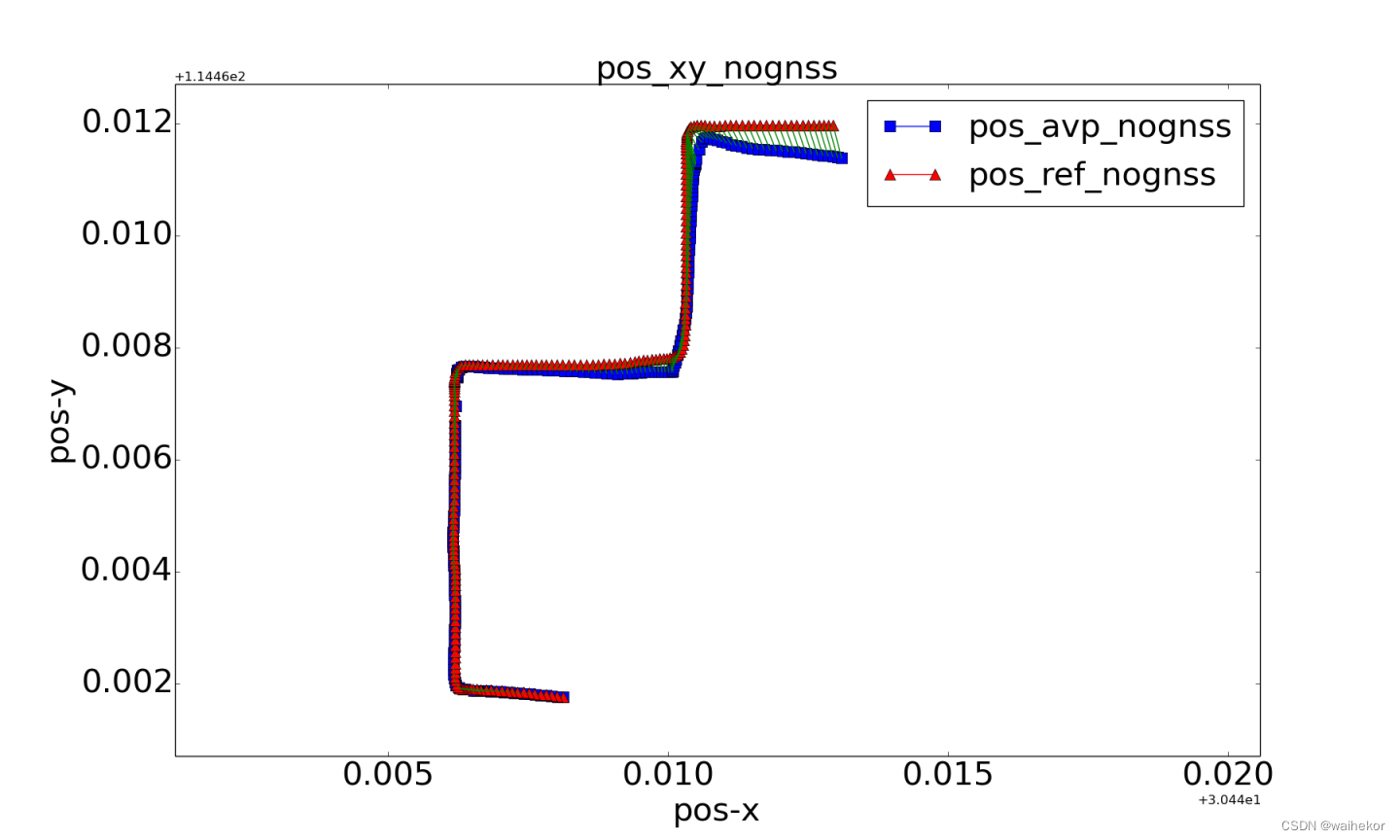
总里程为1.87km,最终误差为3.14%dt。
只有M1(SINS/NHC):
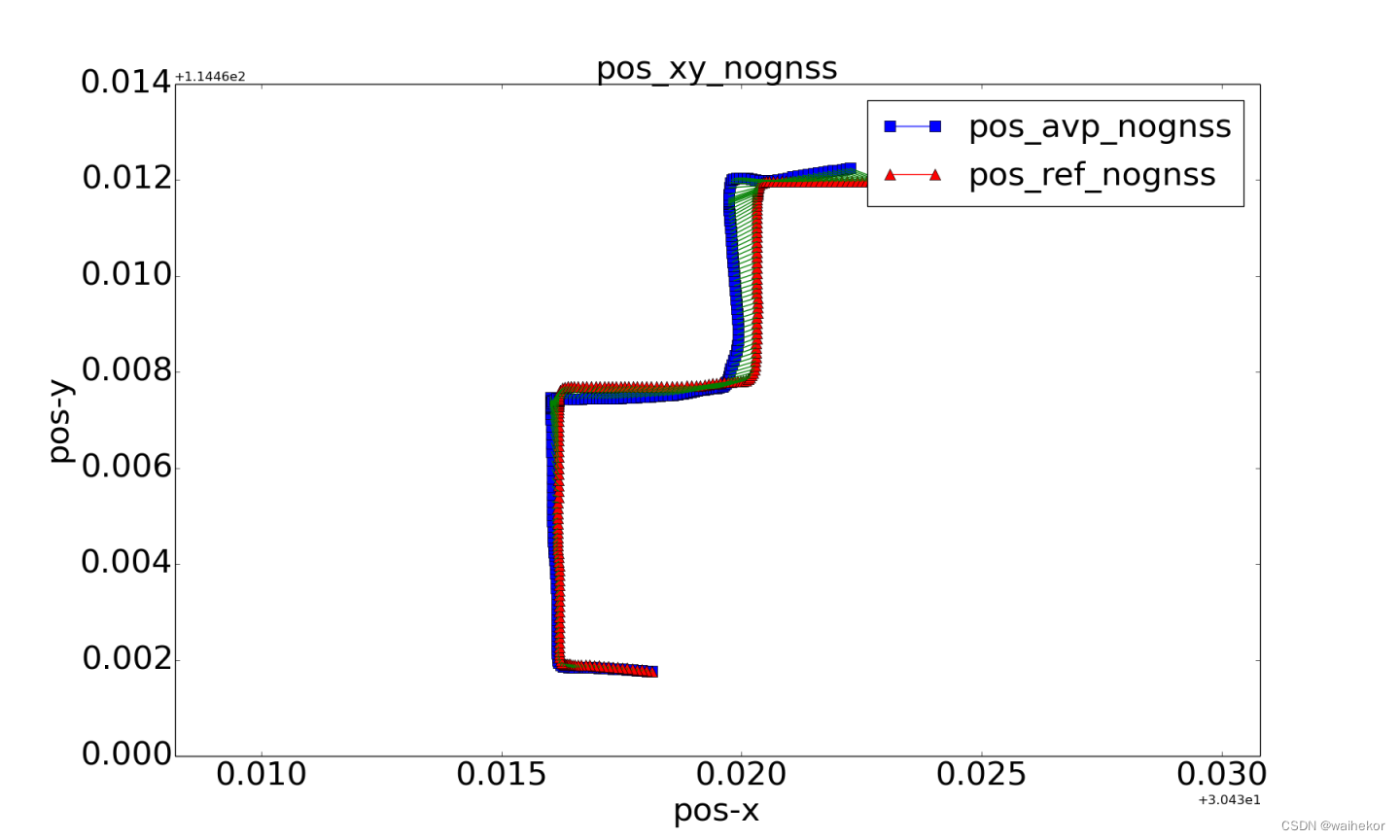
总里程为1.87km,最终误差为4.25%dt。
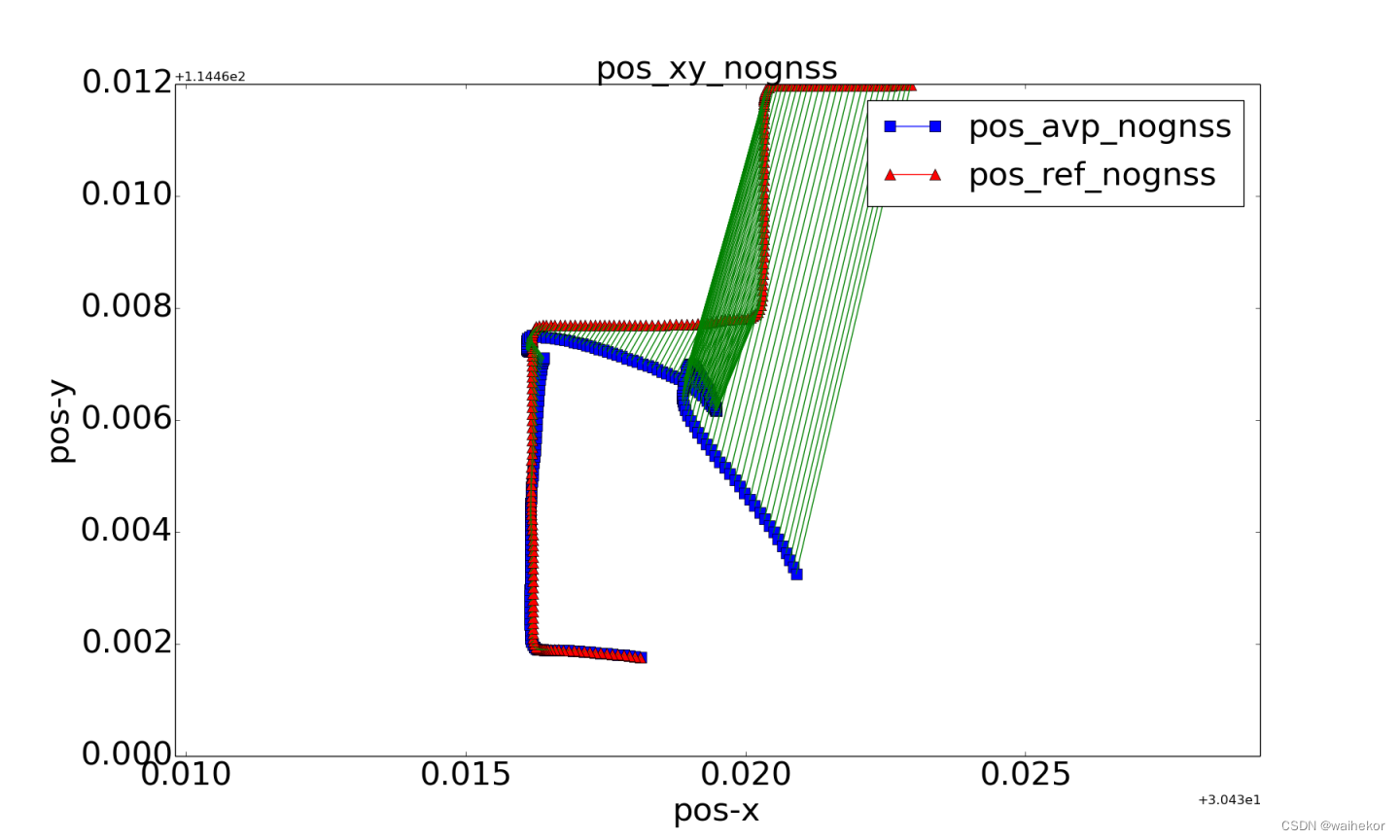
只有M2(SINS/NHC):
总里程为1.87km,最终误差为120%dt,可以看到误差很大。
从上面的对比中可以看出,SINS/NHC组合导航相比纯SINS确实可以大幅提升惯导精度,在SINS/NHC导航中,对于速度的补偿所占比重较大。
参考论文
1.《车辆运动学约束辅助的惯性导航算法》西北工业大学 付强文















 286
286











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









