







目录
1.数学模型的概念,建模的原则
1.1什么是数学模型
所谓的数学模型,是描述系统动态特性及各变量之间关系的数学表达式。控制系统定量分析的基础。
1.1 1数学模型的特点
1) 相似性:不同性质的系统,具有相同的数学模型。抽象的变量和系统
2) 简化性和准确性:忽略次要因素,简化之,但不能太简单,结果合理
3) 动态模型:变量各阶导数之间关系的微分方程。性能分析
4) 静态模型:静态条件下,各变量之间的代数方程。放大倍数
1.12 数学模型的类型
1)微分方程:时域 其它模型的基础 直观 求解繁琐
2)传递函数:复频域 微分方程拉氏变换后的结果
3)频率特性:频域 分析方法不同,各有所长
1.13 数学模型的建立方法
1) 分析法:根据系统各部分的运动机理,按有关定理列方程,合在一起。
2) 实验法:黑箱问题。施加某种测试信号,记录输出,用系统辨识的方法,得到数学模型。
建模原则:选择合适的分析方法-确定相应的数学模型-简化
1.2系统微分方程的建立
1.21列写微分方程式的一般步骤
1) 分析系统运动的因果关系,确定系统的输入量、输出量及内部中间变量,搞清各变量之间的关系。
2) 忽略一些次要因素,合理简化。
3) 根据相关基本定律,列出各部分的原始方程式。
4) 列写中间变量的辅助方程。
方程数与变量数相等!
5) 联立上述方程,消去中间变量,得到只包含输入输出的方程式。
6) 将方程式化成标准形。
与输出有关的放在左边,与输入有关的放在右边,导数项按降阶排列,系数化为有物理意义的形式。
1.22线性微分方程的一般特征
观察实际物理系统的运动方程,若用线性定常特性来描述,则方程一般具有以下形式:

式中,c(t)是系统的输出变量,r(t)是系统的输入变量
从工程可实现的角度来看,上述微分方程满足以下约束:
(1)方程的系数为实常数,由系统自身参数决定;
(2)左端的阶次比右端的高,n>=m。这是因为实际物理系统均有惯性或储能元件;
(3)方程式两端的各项的量纲应一致。利用这点,可以检查微分方程式的正确与否。
1.23机械平移系统的举例
三个基本的无源元件:质量m,弹簧k,阻尼器f
对应三种阻碍运动的力:惯性力ma;弹性力ky;阻尼力fv
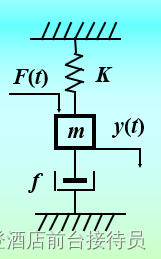
弹簧-质量-阻尼器串联系统。
试列出以外力F(t)为输入量,以质量的位移y(t)为
输出量的运动方程式。
解:遵照列写微分方程的一般步骤有:
(1)确定输入量为F(t),输出量为y(t),作用于质
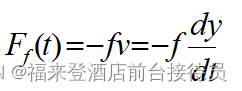
量m的力还有弹性阻力Fk(t)和粘滞阻力Ff(t),均作为
中间变量。
(2)设系统按线性集中参数考虑,且无外力作用时,
系统处于平衡状态。
(3)按牛顿第二定律列写原始方程,即
(4)写中间变量与输出量的关系式![]()
(5)将以上辅助方程式代入原始方程,消去中间变量,得
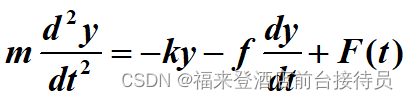
(6)整理方程得标准型

(7)令Tm2 = m/k,Tf = f/k ,则方程化为

1.24电路系统举例
例2-2 电阻-电感-电容串联系统。R-L-C串联电路,试列出以ur(t)为输入量,uc(t)为输出量的网络微分方程式。
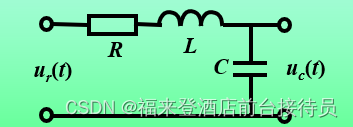
解:(1)确定输入量为ur(t),输出量为uc(t),中间变量为i(t)。
(2)网络按线性集中参数考虑且忽略输出端负载效应。
(3)由KVL写原始方程: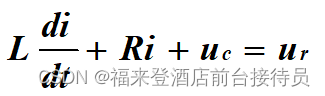
(4)列写中间变量i与输出变量uc 的关系式: 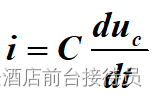
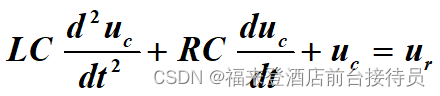
(5)将上式代入原始方程,消去中间变量得
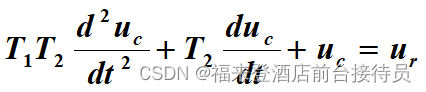
(6)整理成标准形,令T1 = L/R,T2 = RC,则方程化为
1.25电枢控制的直流电动机
直流电动机是将电能转化为机械能的一种典型的机电转换装置。在电枢控制的直流电动机中,由输入的电枢电压ua在电枢回路产生电枢电流ia ,再由电枢电流ia与激磁磁通相互作用产生电磁转矩MD ,从而使电枢旋转,拖动负载运动。
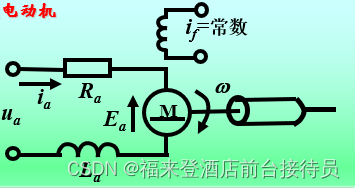
Ra和La分别是电枢绕组总电阻和总电感。在完成能量转换的过程中,其绕组在磁场中切割磁力线会产生感应反电势Ea,其大小与激磁磁通及转速成正比,方向与外加电枢电压ua相反。
下面推导其微分方程式。
(1)取电枢电压ua为控制输入,负载转矩ML为扰动输入,电动机角速度w为输出量;
(2)忽略电枢反应、磁滞、涡流效应等影响,当激磁电流不变if 时,激磁磁通视为不变,则将变量关系看作线性关系;
(3)列写原始方程式
电枢回路方程: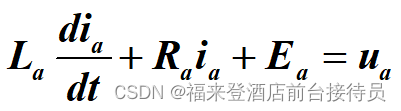
电动机轴上机械运动方程: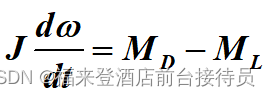
J — 负载折合到电动机轴上的转动惯量;
MD — 电枢电流产生的电磁转矩;
ML — 合到电动机轴上的总负载转矩。
(4)列写辅助方程 Ea = ke w
ke — 电势系数,由电动机结构参数确定。
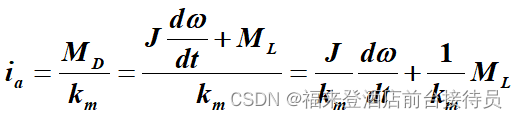
MD = km ia
km — 转矩系数,由电动机结构参数确定。
(5)消去中间变量,得

令机电时间常数Tm :
令电磁时间常数Ta :

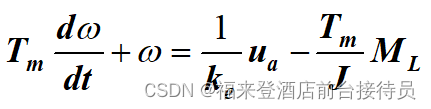
6)当电枢电感较小时,可忽略,可简化上式如下:
7)对微型电机,转动惯量J很小,且Ra 、La都可忽略
8) 随动系统中,取θ为输出

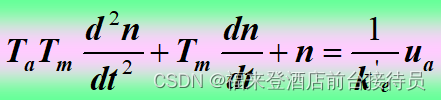
9) 在实际使用中,转速常用n(r/min)表示,设 ML=0![]()
1.26微分方程的实质
机械平移系统的举例
电路系统举例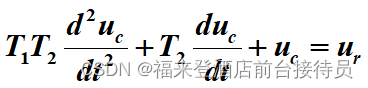
电枢控制的直流电动机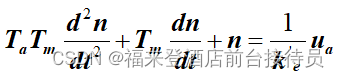
不同的运动具有相似的形式
2.传递函数
2.1拉式变换及其性质
2.11定义
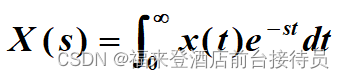
记 X(s) = L[x(t)]
2.12进行拉氏变换的条件
1)t < 0,x(t)=0;当t ³ 0,x(t)是分段连续;
2)当t充分大后满足不等式| x(t)|M
,M,c是常数。
2.13.性质和定理
1)线性性质
L[ aX(t) + bG(t)] = aX(s) + bG(s)
2)微分定理
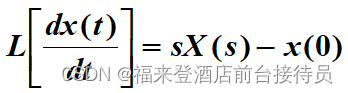
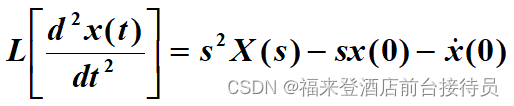
![]()

,......
3)积分定理

(0)是函数∫x(t)dt 在初始时刻的值。同理

若(0)=
(0) = … = 0,x(t)各重积分在t=0的值为0时,
4)终值定理
若x(t)及其一阶导数都是可拉氏变换的,lim x(t)存在(t无穷远处),并且sX(s)除原点为单极点外,在jω轴上及其右半平面内应没有其它极点,则函数x(t)的终值为:![]()
5)初值定理
如果x(t)及其一阶导数是可拉氏变换的,并且![]() 存在,则
存在,则
6)延迟定理
L[ x(t - t)×1(t - t)] = X(s)
L[x(t)] = X(s + a)
7)时标变换(尺度变换)
8)卷积定理
![]()
2.2举例
1.求单位阶跃函数 x(t)=1(t)的拉氏变换。
解:
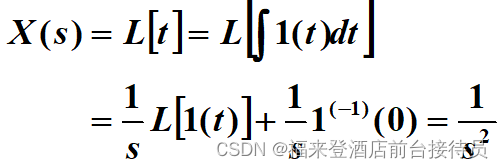
2.求单位斜坡函数x(t)=t的拉氏变换。
解: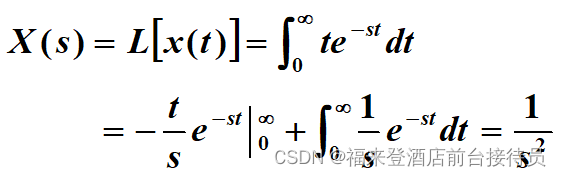
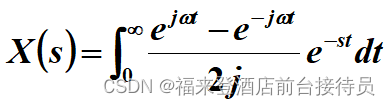
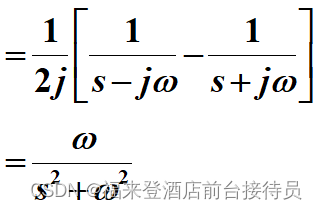
3.求正弦函数x(t) = sinωt 的拉氏变换。
解:
以上几个函数是比较常用的,还有一些常用函数的拉氏变换可查表求得。
4.求函数x(t)的拉氏变换。
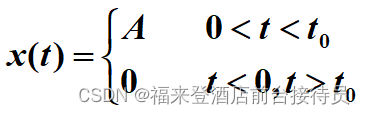
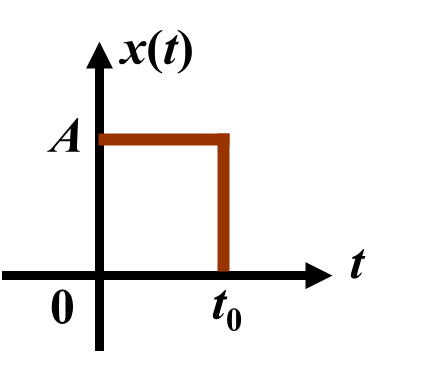

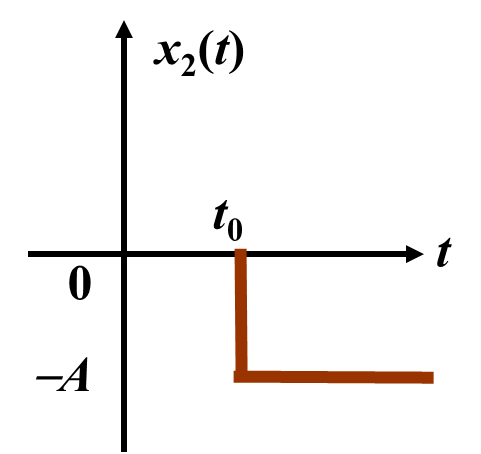
解: x(t) = x1(t) + x2(t) =A×1(t) - A×1(t -t0 )
5,求 的拉氏变换
的拉氏变换
解:

6,求 的拉氏变换。
的拉氏变换。
解:
后续更新中
编者能力有限,如有错误欢迎留言交流
编者的其他专栏:
关注编者了解更多















 18万+
18万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









